Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
328
2016-09-21
10 вещей, которым сложно научить роботов

Быть человеком куда проще, чем создать человека. Возьмите, к примеру, процесс игры в мяч в детстве с другом. Если разложить эту деятельность на отдельные биологические функции, игра перестанет быть простой. Вам нужны датчики, передатчики и эффекторы. Вам нужно рассчитывать, как сильно бить по мячу, чтобы он сократил дистанцию между вами и вашим компаньоном. Вам нужно учитывать солнечные блики, скорость ветра и все, что может отвлечь. Нужно определить, как вращается мяч и как нужно его принимать. И остается пространство для посторонних сценариев: что, если мяч пролетит над головой? Перелетит через забор? Выбьет окно соседу?
Эти вопросы демонстрируют некоторые из наиболее острых проблем робототехники, а также закладывают основу для нашего обратного отсчета. Перед вами список из десяти самых сложных вещей, которым нужно научить роботов. Эту десятку мы должны победить, если когда-нибудь хотим реализовать обещания, сделанные Брэдбери, Диком, Азимовым, Кларком и другими фантастами, которые видели воображаемые миры, где машины ведут себя как люди.
Проложить путь
Передвижение из точки А в точку Б казалось нам простым с детства. Мы, люди, делаем это каждый день, каждый час. Для робота, однако, навигация — особенно через единую среду, которая постоянно изменяется, или через среду, которую он раньше не видел — сложнейшая вещь. Во-первых, робот должен быть способен воспринимать окружающую среду, а также понимать все входящие данные.
Робототехники решают первую проблему, вооружая свои машины массивом датчиков, сканеров, камер и других высокотехнологичных инструментов, которые помогают роботам оценить свое окружение. Лазерные сканеры становятся все более популярными, хотя их нельзя использовать в водной среде из-за того, что свет серьезно искажается в воде. Технология сонара кажется жизнеспособной альтернативой для подводных роботов, но в наземных условиях она куда менее точна. Кроме того, «видеть» свой пейзаж роботу помогает система технического зрения, состоящая из набора интегрированных стереоскопических камер.
Собрать данные об окружающей среде — это только полдела. Куда более сложной задачей будет обработка этих данных и использование их для принятия решений. Многие разработчики управляют своими роботами, используя предопределенную карту или составляя ее на лету. В робототехнике это известно как SLAM — метод одновременной навигации и составления карты. Составление карты здесь означает то, как робот преобразует информацию, полученную датчиками, в определенную форму. Навигация же подразумевает то, как робот позиционирует себя относительно карты. На практике эти два процесса должны протекать одновременно, в форме «курицы и яйца», что выполнимо только при использовании мощных компьютеров и продвинутых алгоритмов, вычисляющих положение на основе вероятностей.
Продемонстрировать ловкость
Роботы собирают упаковки и детали на заводах и складах уже много лет. Но в таких ситуациях они, как правило, не встречаются с людьми и практически всегда работают с одинаковыми по форме объектами в относительно свободной среде. Жизнь такого робота на заводе скучна и заурядна. Если же робот хочет работать на дому или в больнице, для этого ему понадобится обладать продвинутым осязанием, способностью обнаруживать людей поблизости и безупречный вкус в плане выбора действий.
Этим навыкам робота крайне сложно обучить. Обычно ученые вообще не обучают роботов прикосновениям, программируя их на провал, если они вступают в контакт с другим объектом. Однако за последние пять лет или около того были достигнуты значительные успехи в совмещении податливых роботов и искусственной кожи. Податливость относится к уровню гибкости робота. Гибкие машины более податливы, жесткие — менее.
В 2013 году исследователи из Georgia Tech создали роботизированный манипулятор с пружинными суставами, которые позволяют манипулятору сгибаться и взаимодействовать с предметами, подобно человеческой руке. Затем они покрыли все это «кожей», способной распознавать давление или прикосновение. Некоторые виды кожи роботов содержат шестигранные микросхемы, каждая из которых оснащена инфракрасным сенсором, который регистрирует любое приближение ближе чем на сантиметр. Другие оснащаются электронными «отпечатками пальцев» — ребристой и шероховатой поверхностью, которая улучшает сцепление и облегчает обработку сигнала.
Объедините эти высокотехнологичные манипуляторы с продвинутой системой зрения — и вы получите робота, который может сделать нежный массаж или перебрать папку с документами, выбрав нужный из огромной коллекции.
Поддержать беседу

Алан Тьюринг, один из основателей компьютерной науки, сделал в 1950 году смелый прогноз: однажды машины смогут говорить так свободно, что вы не сможете отличить их от людей. Увы, пока роботы (и даже Siri) не оправдали ожиданий Тьюринга. Все потому, что распознавание речи значительно отличается от обработки естественного языка — то, что делают наши мозги, извлекая смысл из слов и предложений в процессе беседы.
Первоначально ученые думали, что повторить это будет так же просто, как подключить правила грамматики к памяти машины. Но попытка запрограммировать грамматические примеры для каждого отдельного языка попросту провалилась. Даже определить значения отдельных слов оказалось весьма сложно (ведь есть такое явление, как омонимы — ключ от двери и ключ скрипичный, например). Люди научились определять значения этих слов в контексте, опираясь на свои умственные способности, развитые за многие годы эволюции, но разбить их снова на строгие правила, которые можно положить на код, оказалось просто невозможно.
В результате многие роботы сегодня обрабатывают язык, основываясь на статистике. Ученые скармливают им огромные тексты, известные как корпусы, а затем позволяют компьютерам разбивать длинные тексты на куски, чтобы выяснить, какие слова часто идут вместе и в каком порядке. Это позволяет роботу «учить» язык, основываясь на статистическом анализе.
Научиться новому

Представим, что кто-то, кто никогда не играл в гольф, решил научиться размахивать клюшкой. Он может прочитать книгу об этом, а затем попробовать или же наблюдать за тем, как практикуется известный гольфист, и потом попробовать самостоятельно. В любом случае освоить азы можно будет просто и быстро.
Робототехники сталкиваются с определенными проблемами, когда пытаются построить автономную машину, способную обучаться новым навыкам. Один из подходов, как в случае с гольфом, заключается в том, чтобы разбить активность на точные шаги, а затем запрограммировать их в мозге робота. Это предполагает, что каждый аспект активности нужно разделить, описать и закодировать, что не всегда-то и легко сделать. Существуют определенные аспекты в размахивании клюшкой для гольфа, которые и словами-то сложно описать. Например, взаимодействие запястья и локтя. Эти тонкие детали легче показать, чем описать.
За последние годы ученые добились определенного успеха в обучении роботов имитировать человека-оператора. Они называют это имитационным обучением, или обучением по демонстрации (методика LfD). Как они это делают? Вооружают машины массивами широкоугольных и масштабирующих камер. Это оборудование позволяет роботу «видеть» учителя, выполняющего определенные активные процессы. Обучающие алгоритмы обрабатывают эти данные для создания математической карты функций, которая объединяет визуальный ввод и желаемые действия. Конечно, роботы LfD должны уметь игнорировать определенные аспекты поведения своего учителя — вроде зуда или насморка — и справляться с похожими проблемами, которые рождаются из-за разницы в анатомии робота и человека.
Обманывать

Любопытное искусство обмана развивалось еще у животных, чтобы обойти конкурентов и не быть съеденным хищниками. На практике обман как искусство выживания может быть весьма и весьма эффективным механизмом самосохранения.
Роботам же научиться обманывать людей или других роботов может быть невероятно сложно (и, возможно, хорошо для нас с вами). Обман требует наличия воображения — способности формировать идеи или образы внешних объектов, не связанных с чувствами — а у машины его, как правило, нет. Они сильны в прямой обработке данных с датчиков, камер и сканеров, но не могут формировать концепции, которые выходят за пределы сенсорных данных.
С другой стороны, роботы будущего могут лучше разбираться в обмане. Ученые Georgia Tech смогли передать некоторые навыки обмана белок роботам в лаборатории. Сначала они изучали хитрых грызунов, которые защищают свои тайники с пищей, заманивая конкурентов в старые и неиспользуемые хранилища. Затем закодировали это поведение в простые правила и загрузили в мозги своих роботов. Машины смогли использовать эти алгоритмы для определения, когда обман может быть полезным в конкретной ситуации. Следовательно, могли обмануть своего компаньона, заманив его в другое место, в котором нет ничего ценного.
Предвидеть действия человека
В «Джетсонах» робот-горничная Рози была в состоянии поддерживать беседу, готовить еду, убирать и помогать Джорджу, Джейну, Джуди и Элрою. Чтобы понять качество сборки Рози, достаточно вспомнить один из начальных эпизодов: мистер Спейсли, босс Джорджа, приходит в дом Джетсонов на ужин. После трапезы он вынимает сигару и помещает ее в рот, а Рози бросается вперед с зажигалкой. Это простое действие представляет собой сложное поведение человека — умение предвидеть, что будет дальше, на основе того, что только что произошло.
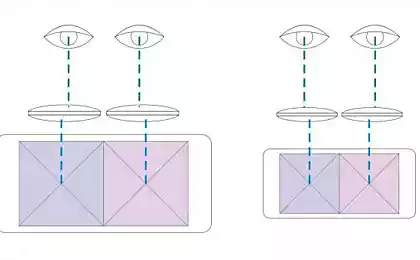
Как и обман, предвосхищение человеческих действий требует от робота представления будущего состояния. Он должен быть в состоянии сказать: «Если я вижу, что человек делает А, значит, как я могу предположить на основе прошлого опыта, скорее всего, он сделает Б». В робототехнике этот пункт был крайне сложным, но люди делают определенный прогресс. Команда Корнельского университета разработала автономного робота, который мог реагировать на основе того, как компаньон взаимодействует с объектами окружающей среды. Для этого он использует пару 3D-камер, чтобы получить изображение окружения. Затем алгоритм определяет ключевые объекты в комнате и выделяет их на фоне остальных. Затем, используя огромное количество информации, полученной в результате предыдущих тренировок, робот вырабатывает набор определенных ожиданий движений от персоны и объектов, которые она трогает. Робот делает выводы относительно того, что будет дальше, и действует соответственно.
Иногда Корнельские роботы ошибаются, но довольно уверенно продвигаются вперед, в том числе и по мере того, как улучшаются технологии камер.
Координировать деятельность с другими роботами
Строительство единой крупномасштабной машины — даже андроида, если хотите — требует серьезных вложений времени, энергии и денег. Другой подход предполагает развертывание армии из более простых роботов, которые могут действовать вместе для достижения сложных задач.
Возникает ряд проблем. Робот, работающий в команде, должен уметь хорошо себя позиционировать в связи с товарищами и быть в состоянии эффективно общаться — с другими машинами и оператором-человеком. Для решения этих проблем ученые обратились к миру насекомых, которые используют сложное роевое поведение для поиска еды и решают задачи, которые приносят пользу всей колонии. Например, изучая муравьев, ученые поняли, что отдельные особи используют феромоны для связи друг с другом.
Роботы могут использовать эту же «феромонову логику», только полагаться на свет, а не на химические вещества, при общении. Работает это так: группа крошечных роботов рассредоточена в ограниченном пространстве. Сначала они исследуют эту область случайным образом, пока один не натыкается на световой след, оставленный другим ботом. Он знает, что нужно идти по следу, и идет, оставляя собственный след. По мере того как следы сливаются в один, все больше и больше роботов следуют друг за другом гуськом.
Самокопироваться
Господь сказал Адаму и Еве: «Плодитесь и размножайтесь, и наполняйте землю». Робот, который получил бы такую команду, почувствовал бы смущение или разочарование. Почему? Потому что он не способен размножаться. Одно дело построить робота, но совсем другое — создать робота, который сможет делать копии самого себя или регенерировать утраченные или поврежденные компоненты.
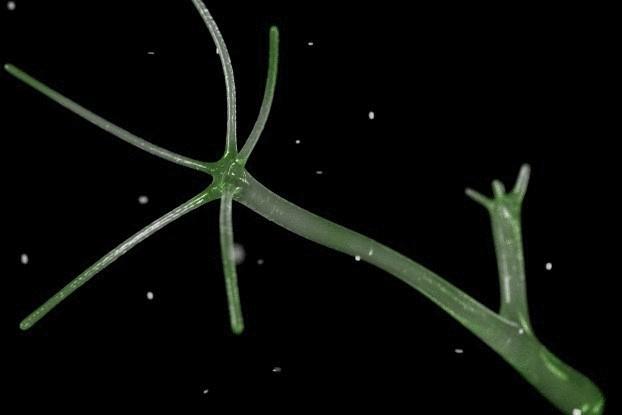
Что примечательно, роботы могут и не брать людей за пример репродуктивной модели. Возможно, вы заметили, что мы не делимся на две одинаковые части. Простейшие, однако, делают это постоянно. Родственники медуз — гидры — практикуют форму бесполого размножения, известную как бутонизацию: небольшой шарик отделяется от тела родителя, а затем отрывается, чтобы стать новым, генетически идентичным индивидуумом.
Ученые работают над роботами, которые смогут выполнять такую же простую процедуру клонирования. Многие из этих роботов построены из повторяющихся элементов, как правило кубов, которые сделаны по образу и подобию одного куба, а также содержат программу саморепликации. У кубиков есть магниты на поверхности, поэтому они могут присоединяться и отсоединяться от других кубов поблизости. Каждый кубик делится на две части по диагонали, поэтому каждая половина может существовать независимо. Весь же робот содержит несколько кубиков, собранных в определенную фигуру.
Действовать из принципа

Когда мы ежедневно общаемся с людьми, мы принимаем сотни решений. В каждом из них мы взвешиваем каждый наш выбор, определяя, что есть хорошо, а что есть плохо, честно и нечестно. Если бы роботы хотели быть похожи на нас, им нужно было бы понять этику.
Но как и в случае с языком, закодировать этическое поведение крайне сложно главным образом потому, что единого набора общепринятых этических принципов не существует. В разных странах существуют разные правила поведения и разные системы законов. Даже в отдельных культурах региональные различия могут повлиять на то, как люди оценивают и измеряют свои действия и действия окружающих. Попытка написать глобальную и подходящую всем роботам этику оказывается практически невозможной.
Именно поэтому ученые решили создавать роботов, ограничивая масштабы этической проблемы. Например, если машина будет работать в определенной среде — на кухне, скажем, или в палате пациента — у нее будет гораздо меньше правил поведения и меньше законов для принятия этически обоснованных решений. Для достижения этой цели инженеры-робототехники вводят основанный на этике выбор в алгоритм обучения машины. Выбор этот основывается на трех гибких критериях: к чему хорошему приведет действие, какой вред оно нанесет и мере справедливости. Используя этот тип искусственного интеллекта, ваш будущий домашний робот сможет точно определить, кто в семье должен мыть посуду, а кому достанется пульт от телевизора на ночь.
Чувствовать эмоции

«Вот мой секрет, он очень прост: зорко одно лишь сердце. Самого главного глазами не увидишь».
Если это замечание Лиса из «Маленького принца» Антуана де Сент-Экзюпери верно, то роботы не увидят самого прекрасного и лучшего в этом мире. В конце концов, они отлично зондируют мир вокруг, но не могут превращать сенсорные данные в конкретные эмоции. Они не могут увидеть улыбку любимого человека и почувствовать радость, или же зафиксировать гневную гримасу незнакомца и задрожать от страха.
Именно это, больше чем что-либо другое в нашем списке, отделяет человека от машины. Как научить робота влюбляться? Как запрограммировать разочарование, отвращение, удивление или жалость? Стоит ли вообще пытаться?
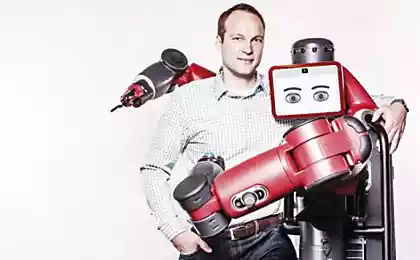
Некоторые думают, что стоит. Они считают, что роботы будущего будут совмещать когнитивные и эмоциональные системы, а значит, лучше работать, быстрее учиться и эффективнее взаимодействовать с людьми. Верьте или нет, прототипы таких роботов уже существуют, и они могут выражать ограниченный диапазон человеческих эмоций. Nao, робот, разработанный европейскими учеными, обладает эмоциональными качествами годовалого ребенка. Он может выражать счастье, злость, страх и гордость, сопровождая эмоции жестами. И это только начало.
Источник: hi-news.ru
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.




































Аям Цемани — невероятная угольно-черная порода кур
Как найти идеальное место для Wi-Fi-роутера внутри своей квартиры