332
10 cosas que son difíciles de enseñar robots

Ser humano es mucho más fácil que crear un ser humano. Tome, por ejemplo, el proceso de jugar la pelota como un niño con un amigo. Si usted descompone estas actividades en funciones biológicas separadas, el juego dejará de ser simple. Necesita sensores, transmisores y efectos. Necesitas calcular lo difícil que es golpear la pelota para que reduzca la distancia entre tú y tu compañero. Necesitas considerar el resplandor del sol, la velocidad del viento y cualquier cosa que pueda distraerte. Necesitas determinar cómo gira la pelota y cómo tomarla. Y hay espacio para escenarios extraneosos: ¿qué pasa si la pelota vuela por encima? ¿Volar sobre la cerca? ¿Abajo la ventana de un vecino?
Estas preguntas demuestran algunos de los problemas más apremiantes de la robótica, y también ponen las bases para nuestra cuenta regresiva. Aquí hay una lista de las diez cosas más difíciles para enseñar robots. Debemos derrotar a los diez primeros si alguna vez debemos cumplir las promesas hechas por Bradbury, Dick, Asimov, Clark y otros escritores de ciencia ficción que han visto mundos imaginarios donde las máquinas se comportan como humanos.
Pave el camino
Moving from point Un punto B parecía fácil desde la infancia. Los humanos hacemos esto todos los días, cada hora. Para un robot, sin embargo, la navegación —especialmente a través de un ambiente único que está cambiando constantemente, o a través de un entorno que no ha visto antes— es una cosa desalentadora. En primer lugar, el robot debe ser capaz de percibir el ambiente, así como entender todos los datos entrantes.
Los robots resuelven el primer problema armando sus máquinas con una serie de sensores, escáneres, cámaras y otras herramientas de alta tecnología que ayudan a los robots a evaluar su entorno. Los escáneres láser se están volviendo cada vez más populares, aunque no se pueden utilizar en entornos acuáticos debido a que la luz se distorsiona severamente en el agua. La tecnología Sonar parece ser una alternativa viable para los robots submarinos, pero en condiciones de tierra es mucho menos preciso. Además, el robot ayuda a “ver” su paisaje con un sistema de visión técnica que consiste en un conjunto de cámaras estereoscópicas integradas.
Recopilar datos ambientales es sólo la mitad de la batalla. Una tarea mucho más difícil será procesar estos datos y utilizarlos para tomar decisiones. Muchos desarrolladores controlan sus robots usando un mapa predefinido o haciéndolo en la mosca. En robótica, esto se conoce como SLAM, un método de navegación y mapeo simultáneo. Mapping aquí significa cómo el robot convierte la información recibida por los sensores en una forma específica. La navegación implica cómo el robot se posiciona en sí mismo en relación con el mapa. En la práctica, estos dos procesos deben tener lugar simultáneamente, en forma de pollo y huevo, que sólo se puede hacer utilizando potentes computadoras y algoritmos avanzados que calculan la posición sobre la base de probabilidades.
Demostrar la agilidad
Los robots han estado recolectando embalajes y piezas en fábricas y almacenes durante años. Pero en tales situaciones, tienden a no conocer gente y casi siempre trabajan con objetos de forma similar en un ambiente relativamente libre. La vida de un robot en la fábrica es aburrida y ordinaria. Si el robot quiere trabajar en casa o en un hospital, tendrá que tener un toque avanzado, la capacidad de detectar personas cercanas e impecables gustos en términos de elección de acciones.
Estas habilidades de robot son extremadamente difíciles de enseñar. Normalmente, los científicos no entrenan robots para tocar en absoluto, programando que fallan si entran en contacto con otro objeto. En los últimos cinco años, sin embargo, se han logrado avances significativos en la combinación de robots malleables y cuero artificial. El cumplimiento se refiere al nivel de flexibilidad del robot. Los coches flexibles son más maleables, rígidos - menos.
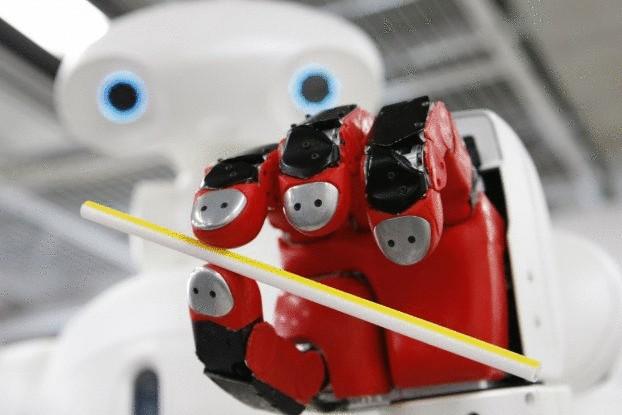
En 2013, investigadores de Georgia Tech crearon un brazo robótico con juntas de primavera que permiten al manipulador doblar e interactuar con objetos como una mano humana. Luego lo recubrieron todo con piel que podía reconocer presión o tacto. Algunos tipos de piel de robot contienen chips hexagonales, cada uno equipado con un sensor infrarrojo que detecta cualquier enfoque más cercano que un centímetro. Otros están equipados con "impresión digital" electrónica - una superficie acanalada y rugosa que mejora el agarre y facilita el procesamiento de señales.
Combine estos manipuladores de alta tecnología con un sistema de visión avanzado – y usted consigue un robot que puede hacer un masaje suave o pasar por una carpeta con documentos, eligiendo el derecho de una colección enorme.
Mantenga la conversación en marcha.

Alan Turing, uno de los fundadores de la informática, hizo una predicción audaz en 1950: un día las máquinas podrán hablar tan libremente que no podrán distinguirlas de las personas. Alas, hasta que los robots (y hasta Siri) cumplieron las expectativas de Turing. Eso es porque el reconocimiento del habla es muy diferente del procesamiento del lenguaje natural, algo que nuestros cerebros hacen al extraer significado de palabras y oraciones durante la conversación.
Inicialmente, los científicos pensaban que repetir esto sería tan fácil como conectar reglas de gramática a la memoria de una máquina. Pero intentar programar ejemplos gramaticales para cada idioma ha fracasado. Incluso para determinar el significado de las palabras individuales fue muy difícil (después de todo, hay un fenómeno como los homónimos – la llave de la puerta y el violín clave, por ejemplo). Los humanos han aprendido a definir los significados de estas palabras en contexto, confiando en sus capacidades mentales desarrolladas durante muchos años de evolución, pero rompiéndolas de nuevo en reglas estrictas que pueden ser puestas en código demostrado simplemente imposible.
Como resultado, muchos robots procesan hoy lenguaje basado en estadísticas. Los científicos les alimentan textos enormes conocidos como corpus y luego permiten que las computadoras rompan textos largos en pedazos para averiguar qué palabras a menudo van juntas y en qué orden. Esto permite al robot “aprender” el lenguaje basado en el análisis estadístico.
Aprender cosas nuevas
455189
Supongamos que alguien que nunca ha jugado golf decidió aprender a mover un palo. Puede leer un libro sobre él y luego probar o ver una famosa práctica de golf y luego probarlo él mismo. En cualquier caso, dominar los fundamentos puede ser simple y rápido.
Los robóticos enfrentan ciertos desafíos cuando intentan construir una máquina autónoma capaz de aprender nuevas habilidades. Un enfoque, como en el caso del golf, es romper la actividad en pasos precisos y luego programarlas en el cerebro del robot. Esto sugiere que cada aspecto de la actividad necesita ser separado, descrito y codificado, que no siempre es fácil de hacer. Hay ciertos aspectos de agitar un club de golf que son difíciles de describir en palabras. Por ejemplo, la interacción de la muñeca y el codo. Estos detalles sutiles son más fáciles de mostrar que describir.
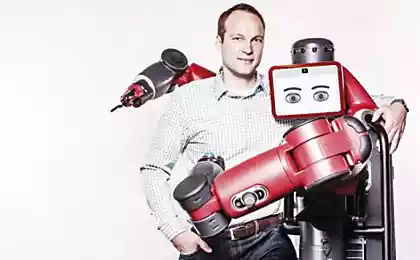
En los últimos años, los científicos han avanzado en la formación de robots para imitar a un operador humano. Llaman a este entrenamiento de imitación o entrenamiento de demostración (LfD). ¿Cómo lo hacen? Armando máquinas con arrays de cámaras de gran angular y escalada. Este equipo permite al robot "ver" al maestro que realiza ciertos procesos activos. Los algoritmos de entrenamiento procesan estos datos para crear un mapa de función matemática que combina la entrada visual y las acciones deseadas. Por supuesto, los robots LfD tienen que ser capaces de ignorar ciertos aspectos del comportamiento de su maestro, como picazón o nariz esponjosa, y tratar con problemas similares que surgen de diferencias en la anatomía humana y robot.
Trick

El curioso arte del engaño ha evolucionado en los animales para evitar a los competidores y no ser comido por los depredadores. En la práctica, el engaño como arte de la supervivencia puede ser un mecanismo muy, muy eficaz de la autopreservación.
Los robots, por otro lado, pueden ser increíblemente difíciles (y quizás buenos para nosotros). El engaño requiere imaginación —la capacidad de formar ideas o imágenes de objetos externos no relacionados con los sentimientos— y una máquina generalmente no lo hace. Son fuertes al procesar directamente datos de sensores, cámaras y escáneres, pero no pueden formar conceptos que vayan más allá de los datos sensoriales.
Por otro lado, los robots del futuro pueden ser mejores en engañar. Georgia Los científicos técnicos han sido capaces de transferir algunas habilidades de engaño de proteínas a robots en el laboratorio. En primer lugar, estudiaron roedores astutos que protegen sus puestos de comida a través de los competidores en viejas y no utilizadas bóvedas. Luego codificaron este comportamiento en reglas simples y lo cargaron en el cerebro de sus robots. Las máquinas fueron capaces de utilizar estos algoritmos para determinar cuándo el engaño podría ser útil en una situación particular. Por lo tanto, podrían engañar a su compañero al llevarlo a otro lugar donde no hay nada de valor.
Anticipar la acción humana
En The Jetsons, Robot Maid Rosie fue capaz de mantener una conversación, cocinar comida, limpiar y ayudar a George, Jane, Judy y Elroy. Para entender la calidad de la construcción de Rosie, basta recordar uno de los episodios de apertura: El Sr. Spaceley, el jefe de George, viene a la casa de los Jetson para cenar. Después de la comida, saca el cigarro y lo pone en su boca, y Rosie avanza con un encendedor. Esta acción simple representa un comportamiento humano complejo, la capacidad de anticipar lo que sucederá después basándose en lo que acaba de pasar.
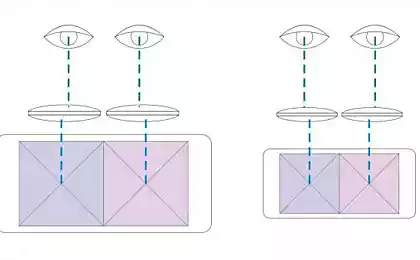
Como engaño, anticipar acciones humanas requiere un robot para imaginar un estado futuro. Debe ser capaz de decir, "Si veo a un hombre haciendo A, entonces, como puedo asumir de la experiencia pasada, es probable que haga B." En la robótica, este punto ha sido extremadamente difícil, pero la gente está progresando. Un equipo de la Universidad de Cornell desarrolló un robot autónomo que podría responder basado en cómo un compañero interactúa con objetos en el medio ambiente. Para ello, utiliza un par de cámaras 3D para obtener una imagen de su entorno. El algoritmo identifica entonces objetos clave en la habitación y los destaca del resto. Luego, utilizando una gran cantidad de información obtenida de entrenamiento previo, el robot desarrolla un conjunto de expectativas específicas de movimientos de la persona y los objetos que toca. El robot saca conclusiones sobre lo que viene después y actúa en consecuencia.
A veces los robots Cornell se equivocan, pero se están moviendo hacia adelante con bastante confianza a medida que la tecnología de la cámara mejora.
Coordinar con otros robots
La construcción de una máquina única y a gran escala, incluso un androide, si lo desea, requiere una inversión seria de tiempo, energía y dinero. Otro enfoque consiste en desplegar un ejército de robots más simples que puedan trabajar juntos para realizar tareas complejas.
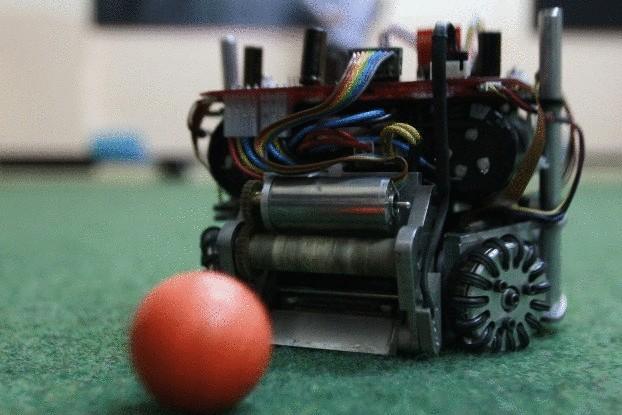
Hay varios problemas. Un robot que trabaja en un equipo debe ser capaz de posicionarse bien en conexión con sus compañeros y ser capaz de comunicarse eficazmente con otras máquinas y un operador humano. Para resolver estos problemas, los científicos se convirtieron en el mundo de los insectos, que utilizan un comportamiento complejo enjambre para encontrar alimentos y resolver problemas que benefician a toda la colonia. Por ejemplo, al estudiar hormigas, los científicos se dieron cuenta de que individuos individuales usan feromonas para comunicarse entre sí.
Los robots pueden utilizar esta misma “lógica de la feromona”, sólo para confiar en la luz en lugar de los químicos para comunicarse. Funciona así: un grupo de pequeños robots se dispersan en un espacio limitado. En primer lugar, exploran el área aleatoriamente hasta que uno cruza un sendero de luz dejado por otro bot. Sabe que tiene que seguir el sendero y caminar, dejando su propio rastro. A medida que las pistas se fusionan en uno, cada vez más robots se siguen en un ganso.
Autocopia
El Señor dijo a Adán y Eva: “Sed fecundos y multiplicaos, y llenad la tierra.” Un robot que recibió tal comando se sentiría avergonzado o decepcionado. ¿Por qué? Porque no puede reproducirse. Una cosa es construir un robot, pero otra es construir un robot que pueda hacer copias de sí mismo o regenerar componentes perdidos o dañados.
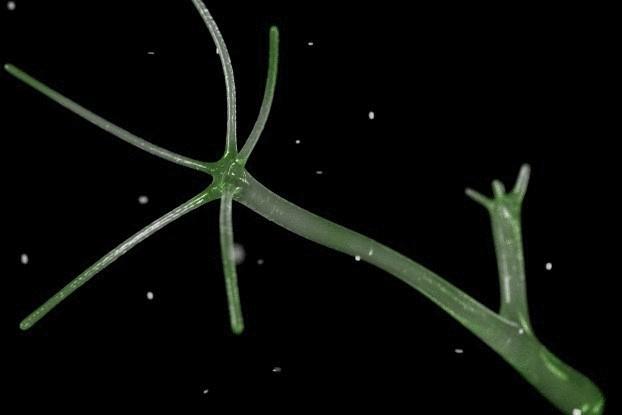
Es notable que los robots no pueden tomar humanos como ejemplo de un modelo reproductivo. Usted puede haber notado que no estamos divididos en dos partes. El más simple, sin embargo, hace esto todo el tiempo. Los parientes de medusas —hidras— practican una forma de reproducción asexual conocida como brote: una pequeña bola se separa del cuerpo de un padre y luego se rompe para convertirse en un individuo nuevo, genéticamente idéntico.
Los científicos están trabajando en robots que pueden realizar el mismo procedimiento de clonación simple. Muchos de estos robots se construyen de elementos repetitivos, generalmente cubos, que se hacen en la imagen y semejanza de un solo cubo, y también contienen un programa de auto-replicación. Los cubos tienen imanes en la superficie, por lo que pueden unirse y separarse de otros cubos cercanos. Cada cubo se divide en dos partes diagonalmente, por lo que cada mitad puede existir independientemente. Del mismo modo, el robot contiene varios cubos montados en una determinada figura.
Ley de principio

Cuando hablamos con la gente todos los días, tomamos cientos de decisiones. En cada uno de ellos, pesamos todas nuestras opciones, determinando lo que es bueno y lo que es malo, justo y deshonesto. Si los robots quisieran ser como nosotros, tendrían que entender la ética.
Pero como con el lenguaje, la codificación del comportamiento ético es extremadamente difícil, principalmente porque no hay un conjunto único de principios éticos aceptados. Diferentes países tienen diferentes reglas de conducta y diferentes sistemas de leyes. Incluso dentro de culturas individuales, las diferencias regionales pueden afectar cómo la gente evalúa y mide sus acciones y las de otros. Intentar escribir una ética global adecuada para todos los robots es casi imposible.
Por eso los científicos decidieron crear robots, limitando el alcance del problema ético. Por ejemplo, si una máquina operara en un ambiente particular, en la cocina, digamos, o en la sala de un paciente, tendría muchas menos reglas de conducta y menos leyes para tomar decisiones éticamente informadas. Para lograr este objetivo, los ingenieros robóticos introducen opciones éticas en el algoritmo de aprendizaje automático. Esta elección se basa en tres criterios flexibles: qué bien conducirá la acción, qué daño causará y la medida de la justicia. Utilizando este tipo de inteligencia artificial, tu futuro robot hogareño será capaz de determinar exactamente quién en la familia debe lavar platos, y quién recibirá un control remoto de la televisión por la noche.
Sentir emociones

Ese es mi secreto, es muy simple: sólo el corazón es agudo. No puedes ver lo más importante. ”
Si este comentario del Fox en Antoine de Saint-Exupery's The Little Prince es correcto, entonces los robots no verán lo más hermoso y mejor del mundo. Después de todo, son geniales en probar el mundo a su alrededor, pero no pueden convertir datos sensoriales en emociones específicas. No pueden ver la sonrisa de un ser querido y sentir alegría, ni fijar la furia de un extraño y temblar con miedo.
Eso, más que cualquier otra cosa en nuestra lista, separa a una persona de una máquina. ¿Cómo enseñas a un robot a enamorarse? ¿Cómo programa la frustración, el disgusto, la sorpresa o la piedad? ¿Deberíamos intentarlo?
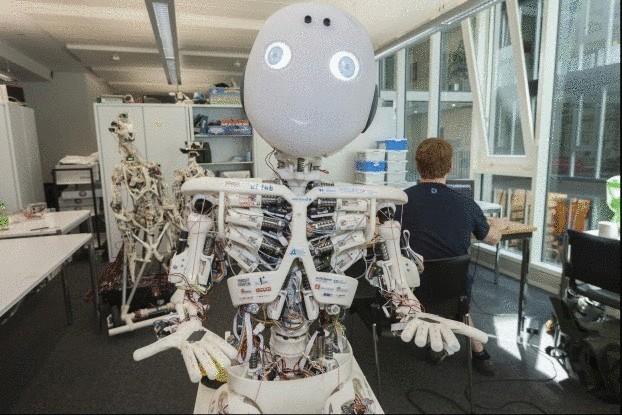
Algunos creen que vale la pena. Creen que los robots del futuro combinarán sistemas cognitivos y emocionales, lo que significa un mejor trabajo, aprender más rápido e interactuar más eficazmente con las personas. Lo creas o no, prototipos de tales robots ya existen, y pueden expresar una gama limitada de emociones humanas. Nao, un robot desarrollado por científicos europeos, tiene las cualidades emocionales de un bebé de un año. Puede expresar felicidad, enojo, miedo y orgullo, acompañando emociones con gestos. Y eso es sólo el principio.
Fuente: hi-news.ru






















Аям Цемани increíble carbón-negro raza de gallinas
Como encontrar el lugar ideal para el Wi-Fi del router en el interior de su apartamento