334
10 речей, які важко навчити роботів
 р.
р.Людина набагато простіше, ніж створення людини. Візьміть, наприклад, процес гри м'яч як дитини з другом. Якщо ви розмовляєте ці дії на окремі біологічні функції, гра перестане бути простою. Вам потрібні датчики, передавачі та ефекти. Вам потрібно розрахувати, як важко вдарити м'яч, щоб він знижує відстань між вами і супутником. Вам необхідно розглянути льодовик сонця, швидкість вітру і все, що може відволікати вас. Вам необхідно визначити, як спиниться кулька і як її взяти. І є кімната для додаткових сценаріїв: що якщо м'яч летить наклад? Проліт над парканом? Удар сусідського вікна?
Ці питання демонструють деякі з найпрестижніших задач робототехніки, а також викладають за основу для нас. Ось список десятих найскладніших речей, щоб навчити роботів. Ми повинні перемогти топ десять, якщо ми коли-небудь виконуємо обіцянки, зроблені Брадбері, Дік, Асимов, Кларк та інші наукові фантастики письменники, які бачили вявні світи, де машини поводяться як люди.
Зберегти спосіб
Переміщення з точки З дитинства здавалося б, здавалося б. Ми робимо це щодня, кожен час. Для роботи, однак, навігація — особливо через одне оточення, яке постійно змінюється, або через навколишнє середовище, яке не бачив раніше — є обов'язковим. Спочатку робот повинен мати можливість сприймати навколишнє середовище, а також зрозуміти всі вхідні дані.
Робототехніка вирішує першу проблему, керуючи їх машинами з масивом датчиків, сканерів, камер та інших високотехнологічних інструментів, які допомагають роботів оцінити їх навколишнє середовище. Лазерні сканери стають все більш популярними, хоча вони не можуть використовуватися в водних середовищах через те, що світло сильно спотворюється в воді. Технологія Sonar є життєздатною альтернативою для підводних роботів, але в умовах заземлення набагато менш точним. Крім того, робот допомагає «дивитись» свій пейзаж з технічною системою зору, що складається з комплекту інтегрованих стереоскопічних камер.
Збір екологічних даних – лише половина битви. Більш складне завдання буде обробляти ці дані і використовувати його для прийняття рішень. Багато розробників контролюють свої роботи за допомогою заздалегідь визначеної карти або робить її на літа. У робототехнікі це відомий як SLAM, метод одночасно навігації і картування. Натискання тут означає, як працює перетворює інформацію, отриману датчиками в певну форму. Навігація включає в себе, як працює на карті. На практиці ці два процеси повинні відбуватися одночасно, у вигляді курки і яйцеклітини, які можна зробити лише за допомогою потужних комп'ютерів і передових алгоритмів, які розрахувати позицію на основі ймовірностей.
Демонстрація спритності
Роботи збирають упаковку і частини на заводах і складах протягом років. Але в таких ситуаціях вони, як правило, не задовольняють людей і практично завжди працюють з аналогічно формованими об'єктами в відносно вільному середовищі. Життя такої роботи на заводі є нудним і звичайним. Якщо робот хоче працювати в домашніх умовах або в стаціонарі, потрібно буде мати підвищений дотик, можливість виявити людей поруч і бездоганний смак в плані вибору дій.
Ці навички роботи дуже складно навчати. Як правило, вчені не навчають роботів торкнутися на всіх, програмувати їх не можна, якщо вони приходять в контакт з іншим об'єктом. За останні п'ять років або так, однак, значні паси були зроблені в поєднанні з пошкодженими роботами і штучною шкірою. Відповідність відноситься до рівня гнучкості роботи. Гнучкі автомобілі більш незрівняні, жорсткі - менше.
У 2013 році дослідники в Грузії Tech створили робототехнічну руку з весняними з'єднаннями, що дозволяють маніпулятору згинатися і взаємодіяти з об'єктами, такими як людина. Вони потім покривають всі шкіри, які можуть розпізнати тиск або дотик. Деякі види шкіри роботи містять шестикутні чіпси, кожен обладнаний інфрачервоним датчиком, який виявляє будь-який підхід ближче до сантиметра. Інші оснащені електронними "апліками" - ребристою і грубою поверхнею, яка покращує зчеплення і полегшує обробку сигналів.
Поєднайте ці маніпулятори в стилі хай-тек з розширеною системою зору, і ви отримаєте робот, який може зробити ніжний масаж або пройти через папку з документами, вибираючи право від величезної колекції.
Зберігати розмову.
 р.
р.Алан Турінг, один з засновників комп'ютерної науки, зробив сміливе прогнозування в 1950 році: один день машини зможуть вільно говорити, що ви не зможете відрізняти їх від людей. Алас, до тих пір, поки роботи (і навіть Сірі) зустрілися очікуваннями Турінга. Це тому, що визнання мови переважно відрізняється від природної обробки мови — щось наше мозок, вилучення сенсу з слів і вироків під час розмови.
Спочатку науковці думали, що це буде так легко, як з'єднання граматичних правил пам'яті машини. Але намагатися програмувати граматичні приклади для кожної мови не вдалося. Навіть визначити значення окремих слів було дуже важко (після всього, є таке явище, як гомоніми – ключ до дверей і клавіатури, наприклад). Люди дізналися, щоб визначити сенси цих слів в контексті, спираючись на свої психічні здібності, розвивалися протягом багатьох років еволюції, але порушуючи їх знову в суворі правила, які можна внести в код, доведено просто неможливо.
В результаті багато роботів сьогодні обробляє мову на основі статистики. Вчені подають їм величезні тексти, відомі як пробочки, а потім дозволяють комп'ютерам розбити довгі тексти на шматки, щоб з'ясувати, які слова часто збираються разом і в якому порядку. За допомогою статистичного аналізу можна ознайомитися на сайті компанії «Людина».
Вивчайте нові речі
 р.
р.Припустимо, що хтось ніколи не відігравав гольф вирішив дізнатися, як гойдати палицю. Він може прочитати книгу про це, а потім спробувати або подивитися на знамениту практику гольфера, а потім спробувати його самому. У будь-якому випадку, оволодіння основами можна просто і швидко.
Робототехніки стикаються з певними проблемами при спробі побудувати автономну машину, здатну навчати нові навички. Один підхід, як і у випадку гольфу, полягає в тому, щоб розбити активність на точні кроки, а потім запрограмувати їх в мозку роботи. Це говорить про те, що кожен аспект діяльності необхідно відокремити, описувати і закодувати, що не завжди легко робити. Є певні аспекти провітрювання гольф-клубу, які важко описати за словами. Наприклад, взаємодія зап'ястя і ліктя. Ці тонкі деталі простіше показати, ніж описати.
В останні роки вчені здійснили деякий прогрес у навчанні роботів для мімалізму оператора людини. Вони називають цю імітацію, або демонстраційні тренінги (LfD). Як це зробити? Верстати з масивами ширококутних і стячих камер. Це обладнання дозволяє співробітнику «дивитись» викладачу виконувати певні активні процеси. Для створення математичної карти функцій, яка поєднує візуальний вхід та бажані дії. Звісно, робота LfD повинні бути в змозі ігнорувати певні аспекти поведінки вчителя - як свербіж або нежить носа - і боротися з аналогічними проблемами, які виникають з відмінностей роботи і анатомії людини.
Нарвегія

Вишукане мистецтво обману перетворилося в тваринах, щоб обійти конкурентів і не їсти хижаками. На практиці, як мистецтво виживання може бути дуже ефективним механізмом самозбереження.
Роботи, з іншого боку, можуть бути неймовірно складними (і, можливо, добре для нас). Прийняття вимагає уяви — вміння формувати ідеї або зображення зовнішніх об'єктів, що не пов'язані з почуттями, і машинка зазвичай не робить. Вони міцні при безпосередньо обробці даних з датчиків, камер і сканерів, але не можуть формувати поняття, які виходять за сенсорні дані.
З іншого боку, робота майбутнього може бути краще в обмані. Грузія Технологічні вчені змогли перенести деякі навички з білків для роботи в лабораторії. По-перше, вони вивчали гризунів, які оберігають свої харчові висипання конкурентами в старі та невикористані скоси. Потім вони закодували цю поведінку в прості правила і завантажили її в мозок своїх роботів. Машини змогли використовувати ці алгоритми для визначення при обманці можуть бути корисними в конкретній ситуації. Таким чином, вони можуть засвоювати своїх супутників, видаючи його іншому місці, де немає значення.
Антитіпатична дія людини
 р.
р.У Jetsons Robot Maid Rosie вдалося провести бесіду, варити їжу, очищати і допомогти Джорджу, Джейну, Юді та Ельрой. Щоб зрозуміти якість збірки Росесу, досить згадати одну з епізодів відкриття: Пан Косплі, Георгій бос, розташований в будинку Jetsons на вечерю. Після їди він виїжджає сигар і кладе його в рот, і Россі кинеться вперед з більш легким. Цей простий ефект являє собою складну поведінку людини - можливість очікувати, що буде наступна на основі того, що сталося просто.
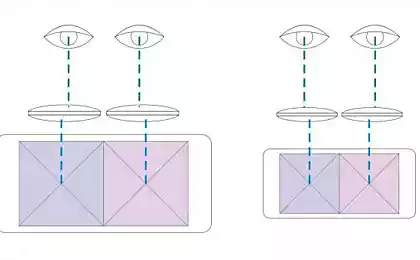
Як і децепція, маніпуляція людських дій вимагає роботи уяви майбутнього стану. Він повинен бути в змозі сказати: "Якщо я бачу чоловіка, що робить А, то, як я можу припустити з минулого досвіду, він, ймовірно, зробити Б." У робототехнікі ця точка була надзвичайно складна, але люди роблять деякий прогрес. Команда в Університеті Cornell розробила автономний робот, який може реагувати на те, як супутник взаємодіє з об'єктами в середовищі. Для цього використовується пара 3D камер, щоб отримати зображення його оточення. Алгоритм визначає ключові об'єкти в номері і висвітлює їх з іншого. Потім, використовуючи величезну кількість інформації, отриманих від попередньої підготовки, робот розвиває набір специфічних очікувань рухів від людини і об'єктів, які він доторкнувся. Роботу виводить висновки про те, що йде поруч і діє відповідно.
У деяких роботах Cornell це неправильно, але вони рухаються вперед досить впевнено, що технологія камери покращується.
Координація з іншими роботами
Побудувати єдиний, масштабний апарат—навіть андроїд, якщо ви будете — вимагаєте серйозних інвестицій часу, енергії та грошей. Ще один підхід передбачає розгортання армії простих роботів, які можуть працювати разом з виконанням складних завдань.
Є ряд проблем. Роботи, що працюють в команді, повинні бути в змозі добре позиціонувати себе в зв'язку з його коштами і здатні ефективно спілкуватися з іншими машинами і оператором людини. Щоб вирішити ці проблеми, вчені зверталися до світу комах, які використовують комплексну поведінку для пошуку продуктів харчування та вирішення проблем, які сприяють всій колонії. Наприклад, навчаючи мурах, вчені усвідомили, що фізичні особи використовують феромони для спілкування один з одним.
Роботи можуть використовувати цю саму «феромонну логіку», щоб спиратися на світло, а не хімічні речовини для спілкування. Працює так: група крихітних роботів розсіюється в обмеженому просторі. По-перше, вони досліджують область випадковим чином до тих пір, поки не надходить на легкий причіп, який залишив іншим ботом. Він знає, що він повинен слідувати стежки і прогулянок, залишаючи свій власний причіп. Як з'єднати треки в одну, більше і більше роботів слідувати один одному в гусці.
Самокопія
 р.
р.Господи сказав Адам і Єва, «Буть плідні і розмножуються, і заповнюють землю». Робот, який отримав таку команду, буде почувати себе розчарованим або розчарованим. Чому? Не можна відтворити. Це одне, щоб побудувати роботу, але це ще один, щоб побудувати роботу, який може зробити копії себе або регенерувати втрачені або пошкоджені компоненти.
Зрозуміло, роботи не можуть приймати людей як приклад репродуктивної моделі. Ви можете помітити, що ми не ділимося на дві частини. Найлегші, однак, роблять це весь час. Відносні засоби рибок — гідрас—практикують форму статевого розмноження, відома як бутонізація: невеликий м'яч відокремлюється від тіла батька, а потім зламається, щоб стати новим, генетично ідентичним індивідуумом.
Вчені працюють на роботів, які можуть виконувати однакову просту процедуру клонування. Багато з цих роботів будуються з повторюваних елементів, зазвичай кубики, які виготовляються в образі і подобності одного куба, а також містять програму самозастосування. Кубики мають магніти на поверхні, тому вони можуть приєднатися і знепадати з інших кубів. Кожен куб ділиться на дві частини по діагоналі, тому кожна половина може існувати самостійно. Все те ж, робот містить кілька кубів, зібраних на певну фігуру.
Акт за принципом

Коли ми говоримо людям щодня, ми робимо сотні рішень. У кожному з них важить наш вибір, визначаючи те, що добре і те, що погано, ярмарок і посуд. Якщо роботодавці хотіли б зрозуміти етику.
Але як з мовою, кодування етичної поведінки є надзвичайно складним, в основному тому, що не існує єдиного набору прийнятих етичних принципів. Різні країни мають різні правила поведінки та різних систем законодавства. Навіть в окремих культурах, регіональні відмінності можуть вплинути на те, як люди оцінюють і вимірюють свої дії та інші. Написати глобальну етику для всіх роботів практично неможливо.
Саме тому вчені вирішили створити роботи, обмеживши сферу етичної проблеми. Наприклад, якщо машина повинна працювати в певному середовищі — на кухні, скажімо, або в приміщенні пацієнта — буде набагато менше правил поведінки і меншого законодавства, щоб зробити етичними рішеннями. Для досягнення поставленої мети інженери робототехніки вводять етичний вибір в алгоритм машинного навчання. Цей вибір базується на трьох гнучких критеріях: які хороші дії призведуть до того, що шкодують, що це призведе до і мірку правосуддя. Використовуючи цей тип штучного інтелекту, ваш майбутній домашній робот зможе точно визначити, хто в сім'ї повинен мити посуд, і хто отримає дистанційне з телевізора на ніч.
Почуття емоцій
12834
«Це мій секрет, це дуже просто: тільки серце різко. Ви не можете бачити найважливіше. й
Якщо це зауваження Фокса в Антоіне де Сент-Експопері є правильним, то роботи не будуть бачити найкрасивіших і кращих у світі. На жаль, вони чудово захоплюють світ навколо них, але вони не можуть перетворювати сенсорні дані в певні емоції. Вони не можуть бачити посмішку коханої людини і відчувати радість, або закріпити сердечко дива і трембл з страхом.
Що, більше, ніж все інше на нашому списку, відокремлює людину від машини. Як ви навчите роботу, щоб закохатися в любові? Як ви програмуєте фрустрацію, дегустація, сюрприз або життя? Чи варто намагатися?
Що думаю, що це варто. Вони вірять, що роботи майбутнього будуть поєднувати когнітивні та емоційні системи, що означає краще роботу, навчаються швидше і ефективно взаємодіяти з людьми. Поведи його або ні, прототипи таких роботів вже існують, і вони можуть висловити обмежений спектр людських емоцій. Нао, робота, розроблена Європейськими науковцями, має емоційні якості однорічного малюка. Можна висловити щастя, небезпечність, страх і гордість, супроводжувати емоції жестами. І це тільки початок.
Джерело: hi-news.ru






















Ayam Cemani є неймовірною вугільно-чорною породою курчат
Як знайти ідеальне місце для маршрутизатора Wi-Fi