2448
Роботи в медицині
92580669
Сьогодні дослідницькі групи по всьому світу намагаються знайти концепцію використання роботів в медицині. Незважаючи на те, що це більш правильно сказати «прочитане відчуття». Судячи за кількістю розробок і інтересами різних наукових груп, можна сперечатися, що основним напрямком стало створення медичних мікророботів. Також можна віднести роботи з префіксом «нано-». І перші успіхи в цій області були досягнуті порівняно недавно, тільки вісім років тому.
У 2006 році група дослідників під керівництвом Сильван Мартел провела перший успішний експеримент у світі, запустивши крихітний робот, розмір балки ручки в сонну артерію живої свині. У той же час робот перейшов по всіх позначених «патських точок». І в роки з тих пір, коли мікророботика досягла певного прогресу.
Однією з основних цілей для інженерів сьогодні є створення таких медичних роботів, які зможуть рухатися не тільки через великі артерії, але і через відносно вузькі судини. Це дозволить комплексне лікування без такої травматичної операції.
Але це не єдина потенційна користь мікроботів. Перш за все, вони будуть корисні при лікуванні раку, цілеспрямовано доставлять препарат безпосередньо до злоякісного утворення. Значення такої можливості складно переоцінити: при хіміотерапії, препарати подаються через ІV, викликаючи сильний удар до всього тіла. Насправді це потужна отрута, яка пошкоджує багато внутрішніх органів і, для компанії, сама пухлина. Це можна порівняти з ковроліном, щоб знищити невелику одну ціль.
Завданням створення таких мікророботів є приєднання низки наукових дисциплін. Наприклад, з точки зору фізики, як зробити такий невеликий об'єкт самостійно переміщається в в'язкій рідині, яка для неї кров? З технічної точки зору, як ви працюєте робот і відстежуєте рух крихітного предмета? З біологічної точки зору, які матеріали можуть бути використані, щоб зробити роботи так, щоб вони не завдають шкоди організму людини? В ідеалі роботи повинні бути біологічними, щоб вони не повинні бути ліквідовані.
Один приклад того, як мікророботи можуть «забрудувати» тіло пацієнта – «біорекета». й
 Р
Р
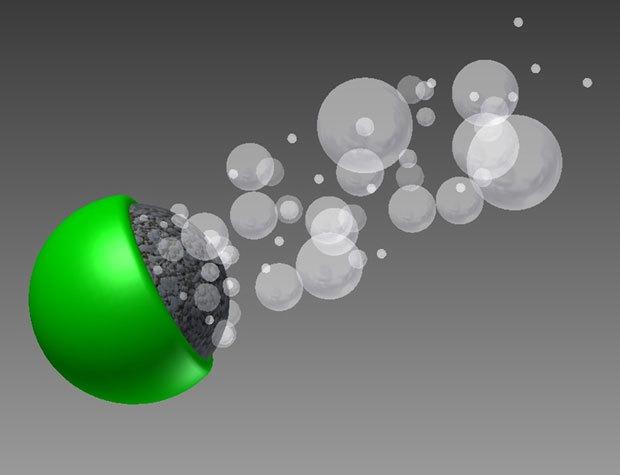
Ця версія мікроробота є титановим ядром, що об'єднує оболонку алюмінію. Діаметр роботи – 20 мкм. Алюміній реагує з водою, під час якої утворюються бульбашки водню на поверхні оболонки, які відштовхують всю структуру. У воді такий «біорейкета» плаває в одну секунду відстань до 150 її діаметрів. Це можна порівняти з чоловіком з висотою двох метрів, який плаває 300 метрів, 12 басейнів в секунду. Цей хімічний двигун працює близько 5 хвилин через додавання жовчного, що знижує інтенсивність утворення оксиду. Максимальний запас живлення становить близько 900 мм у воді. Напрямок руху дається робота зовнішнім магнітним полем, і його можна використовувати для доставки точкових препаратів. Але тільки після того, як «заряджається» пацієнт буде мати розсіювання мікробів з алюмінієвою оболонкою, що не має корисного впливу на організм людини, на відміну від біологічно нейтрального титану.
Микроботи повинні бути настільки малими, що просто масштабування традиційних технологій до потрібного розміру неможливо. Немає стандартних частин відповідного розміру. І навіть якщо вони зробили, вони просто не підходять для таких специфічних потреб. І так дослідники, як сталося багато разів в історії винаходу, шукають натхнення від природи. Наприклад, ті ж бактерії. На мікро, і ще більше, так на нанорозмірі, діють абсолютно різні фізичні закони. Зокрема, вода дуже в'язана рідина. Таким чином, інші інженерні рішення необхідно використовувати для забезпечення руху мікророботів. Бактерії часто вирішують цю проблему за допомогою вілі.
До цього року команда дослідників з університету Торонто створила прототип довгого мікроробота 1 мм, керованого зовнішнім магнітним полем і оснащеного двома захопленнями. Розробникам вдалося побудувати міст з ним. Також цей робот може використовуватися не тільки для доставки препарату, але і для механічного ремонту тканин в кровоносній системі і органах.
Ще одним цікавим напрямком в мікророботиках є роботи, керовані м'язами. Наприклад, є цей проект: електрично стимулює м'язову клітинку, яка прикріплюється до роботи, який виготовлений з гідрогела.
Ця система по суті реплікує природний розчин, знайдений в багатьох ссавців. Наприклад, в тілі людини, скорочення м'язів передається до кісток через сухожилля. У цьому біороботі, коли клітина усаджує під впливом електрики, вигини «наступні» і перехрестя, які виступають в якості ніг приваблюють один до одного. Якщо один з них під час флексування «холоди» переходить на коротку відстань, робот рухається до цього «лега».
Існує ще одне бачення для того, які медичні мікророботи повинні бути: м'які, реплікуючи форми різних живих речей. Наприклад, це робота бджільництва.
471692
Однак не призначено для медичних цілей, але для ряду інших: обпилення рослин, пошук і рятувальні операції, виявлення отруйних речовин. Автори проекту, звичайно, не сліпо копіюють анатомічні особливості бджільництва. Натомість вони ретельно аналізують всілякі «конструкції» організмів різних комах, адаптують і втілюють їх в механіку.
Або ще один приклад використання наявних в природі «структури» - мікроробота у вигляді жовчних молюсків. Він переміщається за допомогою клапки "фліпс", тим самим створюючи струменевий потік. На близько 1 мм в розмірах вона може плавати всередині околя людини. Як і більшість інших медичних роботів, це молюск використовує зовнішній магнітний поле як джерело енергії. Але є важлива відмінність: вона тільки отримує енергію для переміщення, поле не рухається її, на відміну від більшості інших видів мікророботів.
Звичайно, парк медичного обладнання не обмежується лише мікророботами. В наукових фантастичних фільмах і книгах, медичні роботи зазвичай представлені як заміни для хірургів людини. Так само це різновид великого пристрою, який швидко і дуже точно виробляє всілякі хірургічні маніпуляції. Не дивно, що ця ідея була однією з перших. Звісно, сучасні хірургічні роботи не здатні замінити всю людину, але пошиття їх вже цілком довіряється. Також використовуються як розширення рук хірурга як маніпулятори.
Однак в медичному середовищі виникають суперечки про доцільність використання таких машин. Багато експертів вважають, що такі роботи не дають спеціальних переваг, а завдяки високій ціні вони значно підвищують вартість медичних послуг. З іншого боку, є дослідження, за яким пацієнти з раку простати, які пройшли операцію з помічником роботи, в майбутньому вимагають менш інтенсивного використання гормональних препаратів і радіотерапії. В цілому не дивно, що зусилля багатьох вчених були спрямовані на створення мікророботів.
Цікавий проект Робонаут, телемедицина, призначений для надання допомоги астрономам. Це експериментальний проект, але цей підхід може бути використаний не тільки для забезпечення такої важливої та дорогої підготовки людей астрономів. У віддалених приміщеннях також можуть використовуватися роботи телемедицини. Звичайно, це буде доцільно тільки якщо це буде дешевше, щоб встановити віддалений тайга або гірський сільський робот в непідтвердженому вигляді, ніж тримати парамедика на заробітній платі.
І цей медичний робот ще більш спеціалізований, він використовується для лікування облицювання. ARTAS автоматично “диги” волосяні цибулини від шкіри пацієнта на основі фото високої роздільної здатності. Потім лікар-людей вручну вводить «великий» в приварних зонах.

Після всього, світ медичних роботів не на всіх, як монотонних, оскільки це може здатися недосвідченою особою. Більш того, він активно розвивається, є накопичення ідей, пошук результатів експериментів і найбільш ефективних підходів. І хто знає, можливо навіть в нашому житті слово «хірург» означатиме лікаря не з лушпинням, але з банкою мікророботів, що буде досить ковтати або вводити через IV.
Джерело: geektimes.ru/company/asus/blog/242432/
Сьогодні дослідницькі групи по всьому світу намагаються знайти концепцію використання роботів в медицині. Незважаючи на те, що це більш правильно сказати «прочитане відчуття». Судячи за кількістю розробок і інтересами різних наукових груп, можна сперечатися, що основним напрямком стало створення медичних мікророботів. Також можна віднести роботи з префіксом «нано-». І перші успіхи в цій області були досягнуті порівняно недавно, тільки вісім років тому.
У 2006 році група дослідників під керівництвом Сильван Мартел провела перший успішний експеримент у світі, запустивши крихітний робот, розмір балки ручки в сонну артерію живої свині. У той же час робот перейшов по всіх позначених «патських точок». І в роки з тих пір, коли мікророботика досягла певного прогресу.
Однією з основних цілей для інженерів сьогодні є створення таких медичних роботів, які зможуть рухатися не тільки через великі артерії, але і через відносно вузькі судини. Це дозволить комплексне лікування без такої травматичної операції.
Але це не єдина потенційна користь мікроботів. Перш за все, вони будуть корисні при лікуванні раку, цілеспрямовано доставлять препарат безпосередньо до злоякісного утворення. Значення такої можливості складно переоцінити: при хіміотерапії, препарати подаються через ІV, викликаючи сильний удар до всього тіла. Насправді це потужна отрута, яка пошкоджує багато внутрішніх органів і, для компанії, сама пухлина. Це можна порівняти з ковроліном, щоб знищити невелику одну ціль.
Завданням створення таких мікророботів є приєднання низки наукових дисциплін. Наприклад, з точки зору фізики, як зробити такий невеликий об'єкт самостійно переміщається в в'язкій рідині, яка для неї кров? З технічної точки зору, як ви працюєте робот і відстежуєте рух крихітного предмета? З біологічної точки зору, які матеріали можуть бути використані, щоб зробити роботи так, щоб вони не завдають шкоди організму людини? В ідеалі роботи повинні бути біологічними, щоб вони не повинні бути ліквідовані.
Один приклад того, як мікророботи можуть «забрудувати» тіло пацієнта – «біорекета». й
 Р
РЦя версія мікроробота є титановим ядром, що об'єднує оболонку алюмінію. Діаметр роботи – 20 мкм. Алюміній реагує з водою, під час якої утворюються бульбашки водню на поверхні оболонки, які відштовхують всю структуру. У воді такий «біорейкета» плаває в одну секунду відстань до 150 її діаметрів. Це можна порівняти з чоловіком з висотою двох метрів, який плаває 300 метрів, 12 басейнів в секунду. Цей хімічний двигун працює близько 5 хвилин через додавання жовчного, що знижує інтенсивність утворення оксиду. Максимальний запас живлення становить близько 900 мм у воді. Напрямок руху дається робота зовнішнім магнітним полем, і його можна використовувати для доставки точкових препаратів. Але тільки після того, як «заряджається» пацієнт буде мати розсіювання мікробів з алюмінієвою оболонкою, що не має корисного впливу на організм людини, на відміну від біологічно нейтрального титану.
Микроботи повинні бути настільки малими, що просто масштабування традиційних технологій до потрібного розміру неможливо. Немає стандартних частин відповідного розміру. І навіть якщо вони зробили, вони просто не підходять для таких специфічних потреб. І так дослідники, як сталося багато разів в історії винаходу, шукають натхнення від природи. Наприклад, ті ж бактерії. На мікро, і ще більше, так на нанорозмірі, діють абсолютно різні фізичні закони. Зокрема, вода дуже в'язана рідина. Таким чином, інші інженерні рішення необхідно використовувати для забезпечення руху мікророботів. Бактерії часто вирішують цю проблему за допомогою вілі.
До цього року команда дослідників з університету Торонто створила прототип довгого мікроробота 1 мм, керованого зовнішнім магнітним полем і оснащеного двома захопленнями. Розробникам вдалося побудувати міст з ним. Також цей робот може використовуватися не тільки для доставки препарату, але і для механічного ремонту тканин в кровоносній системі і органах.
Ще одним цікавим напрямком в мікророботиках є роботи, керовані м'язами. Наприклад, є цей проект: електрично стимулює м'язову клітинку, яка прикріплюється до роботи, який виготовлений з гідрогела.
Ця система по суті реплікує природний розчин, знайдений в багатьох ссавців. Наприклад, в тілі людини, скорочення м'язів передається до кісток через сухожилля. У цьому біороботі, коли клітина усаджує під впливом електрики, вигини «наступні» і перехрестя, які виступають в якості ніг приваблюють один до одного. Якщо один з них під час флексування «холоди» переходить на коротку відстань, робот рухається до цього «лега».
Існує ще одне бачення для того, які медичні мікророботи повинні бути: м'які, реплікуючи форми різних живих речей. Наприклад, це робота бджільництва.
471692
Однак не призначено для медичних цілей, але для ряду інших: обпилення рослин, пошук і рятувальні операції, виявлення отруйних речовин. Автори проекту, звичайно, не сліпо копіюють анатомічні особливості бджільництва. Натомість вони ретельно аналізують всілякі «конструкції» організмів різних комах, адаптують і втілюють їх в механіку.
Або ще один приклад використання наявних в природі «структури» - мікроробота у вигляді жовчних молюсків. Він переміщається за допомогою клапки "фліпс", тим самим створюючи струменевий потік. На близько 1 мм в розмірах вона може плавати всередині околя людини. Як і більшість інших медичних роботів, це молюск використовує зовнішній магнітний поле як джерело енергії. Але є важлива відмінність: вона тільки отримує енергію для переміщення, поле не рухається її, на відміну від більшості інших видів мікророботів.
Звичайно, парк медичного обладнання не обмежується лише мікророботами. В наукових фантастичних фільмах і книгах, медичні роботи зазвичай представлені як заміни для хірургів людини. Так само це різновид великого пристрою, який швидко і дуже точно виробляє всілякі хірургічні маніпуляції. Не дивно, що ця ідея була однією з перших. Звісно, сучасні хірургічні роботи не здатні замінити всю людину, але пошиття їх вже цілком довіряється. Також використовуються як розширення рук хірурга як маніпулятори.
Однак в медичному середовищі виникають суперечки про доцільність використання таких машин. Багато експертів вважають, що такі роботи не дають спеціальних переваг, а завдяки високій ціні вони значно підвищують вартість медичних послуг. З іншого боку, є дослідження, за яким пацієнти з раку простати, які пройшли операцію з помічником роботи, в майбутньому вимагають менш інтенсивного використання гормональних препаратів і радіотерапії. В цілому не дивно, що зусилля багатьох вчених були спрямовані на створення мікророботів.
Цікавий проект Робонаут, телемедицина, призначений для надання допомоги астрономам. Це експериментальний проект, але цей підхід може бути використаний не тільки для забезпечення такої важливої та дорогої підготовки людей астрономів. У віддалених приміщеннях також можуть використовуватися роботи телемедицини. Звичайно, це буде доцільно тільки якщо це буде дешевше, щоб встановити віддалений тайга або гірський сільський робот в непідтвердженому вигляді, ніж тримати парамедика на заробітній платі.
І цей медичний робот ще більш спеціалізований, він використовується для лікування облицювання. ARTAS автоматично “диги” волосяні цибулини від шкіри пацієнта на основі фото високої роздільної здатності. Потім лікар-людей вручну вводить «великий» в приварних зонах.

Після всього, світ медичних роботів не на всіх, як монотонних, оскільки це може здатися недосвідченою особою. Більш того, він активно розвивається, є накопичення ідей, пошук результатів експериментів і найбільш ефективних підходів. І хто знає, можливо навіть в нашому житті слово «хірург» означатиме лікаря не з лушпинням, але з банкою мікророботів, що буде досить ковтати або вводити через IV.
Джерело: geektimes.ru/company/asus/blog/242432/























