1858
Як працює робота Південної Кореї-HUBO Wins the DARPA Robotics Challenge
Субота команда. Корея Провідний інститут науки і техніки (КАІС) Південна Корея стала переможцем DARPA Robotics Challenge (DRC) У Помона, Каліфорнія, їх робот адаптований гуманоїд. DRC-HUBOВін погравав 22 інших роботів з п'яти різних країн і виграв топ грошовий приз $2 млн.

Уміння трансформуватися з дволегованої ходової роботи на машині на колесах було інструментом для виграшу. Багато роботи загубили баланс і впало на землю під час відкриття дверей або роботи дрилі. Але DRC-HUBOй Унікальний дизайн дозволяв йому завершити завдання швидше і, більш важливо, залишатися на ногах (і колеса).
Переміщення на двох ногах [для роботів] є досить стабільним, - сказав він Хо О, професор машинобудування в Кореї Провідний інститут науки і техніки і керівника команди KAIST. Якщо одна справа йде неправильно, результат може бути дисастроном.

Він сказав, що робот гуманоїд має переваги при роботі в суспільстві людини, але він хотів розробити дизайн, який дозволить мінімізувати ризик падіння: «Я думав про багато речей, і найпростіші колеса на колінах. й
DRC-HUBO може змінити поставу, стоячи на двох ногах, ходити, досягати об'єктів, які високі, і перемістити в більш стабільну позицію, на колінах.
ДАРПА вирішили організувати ДТРК Після інциденту Fukushima в Японії, сподіваючись заздалегідь в робототехнікі. Команди, які розвивали напівавтономні роботи, були запрошені на конкурс DRC Фіналістів, і оператори людини повинні працювати разом з імітацією умов катастрофи. Роботи, створені університетами та компаніями для змагань, дуже відрізняються за розмірами та формою, серед них є роботи з ногами, колесами та гібридами.
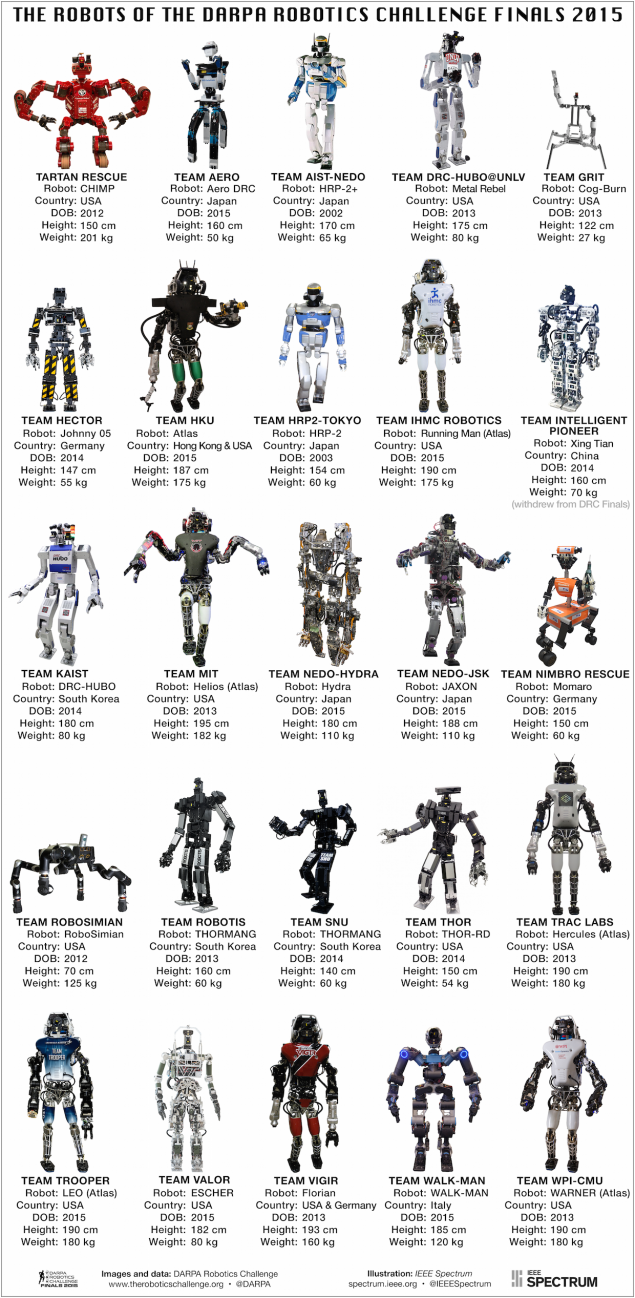
DRC-HUBO Він виграв, тому що він зміг завершити всі вісім завдань без помилок в найкоротші терміни (44 хвилин 28 секунд). Крім того, у зв’язку з затримками, їх роботи втратили час. Серед кращих — команда. Татан порятуноксвінгери ГІМП Робот з ногами і відстеженими стрічками, які змогли повернутися до завдань після западу Матуся з команди Університету Бонна – простий і елегантний автомобіль на колесах, з поворотною головою і двома руками; РобоСимян від Jet НАСА Лабораторія, з чотирма ніжками та йогаподібними рухами АЛАС Команди ІХМ Великий електричний гуманоїдний робот, розроблений компанією Бостон Динамікай
66672825
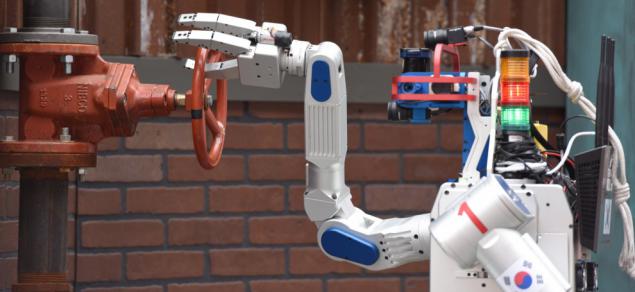
DRC-HUBO виконує завдання закриття клапана. Зверніть увагу, що верхня частина його тіла перетворена на 180 градусів.
Гнучкість - найважливіше, керівник DARPA та організатор DRC Gil Pratt заявив на зустрічі з журналістами, прокоментуючи дизайн роботи. Робот, який може змінити конфігурацію з використанням ніжок для використання коліс, може мати більш складний дизайн і більше ваги, але це дасть вам цю гнучкість.
Викладач О – визнаний експерт з питань гуманоїдної роботи. Студенти КАІСТО У Дайєеон, Південна Корея, HUBO покращила свою платформу для поколінь. Нижче наведено відео про те, що вже кілька років працює: потім професор Ой продемонстрував Хабу 2:
Для ДТРК Закінчення Він вирішив істотно змінити роботу, щоб підготувати його до поставлених завдань. Професор Ох сказав:DRC-HUBO«З іншого боку, це просто людинаїдна робота». Але насправді його команда КАІСТО Я роблю кожну деталь ретельно. Очікується вартість кожного робота близько $500,000 і $1 млн. Нижче основні функції, які допомогли DRC-HUBOВізьміть завдання:
1,1 км Колеса на колінах:DRC-HUBO Має колеса на колінах і роликах на ногах. Колеса дозволяють швидко переміщатися і постійно. Переміщення на землі, використовує оптичні датчики на гомілках, щоб виміряти відстань за допомогою оптичного потоку.
2,2 км Потужні двигуни:і СКАЧАТИ Роботи, які здобули попередній конкурс ДАРПА і придбана компанією Українськай DRC-HUBO Він має дуже потужні двигуни (33, з 31 градусів вільного руху). Завдяки спеціалізованим двигунам і системам охолодження повітря (фани і леза), робот може використовувати напругу 3-4 рази більше, ніж зазначена в специфікаціях двигуна, з максимальною кількістю 30 ампер в деяких випадках.
3. У Сумісність:Команда бажала зробити робот сумісним без використання силових датчиків і звичайного автоматичного регулятора (вони бояться, що це призведе до нестійкості). Таким чином, за допомогою спеціального підсилювача, проблема сумісності була передана до драйвера двигуна.
 Р
Р4. У Обертання тулуба:DRC-HUBO Ви можете обертати верхній корпус 180 градусів. Це означає, що коліна робота може бути перетворена в одному напрямку, і вона може виглядати в зворотному напрямку (зберігати себе!). Ця здатність працює не тільки тоді, коли він стоїть, але і коли він на колінах. Роботи скоригували цю можливість в декількох задачах, коли необхідно було приїхати на транспортний засіб, закріпити стіну, пересуватися через рубльовий і сходження сходів.
5. Умань Довгі руки:збірка КАІСТО Реалізовано, що руки Губка2,2 км Занадто короткий для деяких завдань, тому вони зробили довше, поворот 7 градусів. Вони також поховали всі кабелі всередині, щоб тримати їх від скручування до навколишніх предметів. Кожна рука може тримати вагу до 15 кг, а також має "додатковий захоплення", який може захопити тверді та м'які предмети.
6. Жнівень Спрощена сенсаціяЗамість заповнення голови датчиками, стериоскопічними камерами і лідарами, які постійно сканують навколишнє середовище (це технологія використовується роботом). АЛАСНаприклад, DRC-HUBO У спрощеній системі технічного зору оператори спираються на звичайну камеру більшу частину часу, а лідар прикріплюється до сервоприводу тільки в міру необхідності. По суті, робот не має голови — «тільки очі», - сказав один студент. КАІСТОй
7. Про нас Потужність:Коли двигуни вимагають великої потужності, основна система живлення може не мати можливості забезпечити достатню потужність до важливих компонентів машини. Щоб уникнути цього, команда використовувала суперконденсатор, який постачає живлення на комп'ютери, канали передачі і деякі датчики і гіроскопи, навіть якщо основна система живлення не зникає.
8. Спеціальні пропозиції:Команда використовує в реальному часі операційну систему Xenomai для Linux і спеціальну раму керування рухом називається Xenomai. РОДО (розробка) КАІСТО). Він також використовує середовище для імітаційного моделювання Gazebo. Команда розробила програмне забезпечення з фокусом на низькій пропускній здатності та нестійкому зв’язку між операторами та роботом.

Тепер розглянемо більш детальну інформацію. DRC-HUBO і як він пішов через всі вісім завдань, які принесли перемогу в команді з КАІСТО (Якщо ви хочете бачити все по-своєму, ви можете зробити це тут; прискорена версія тут):
1,1 км Призначення водіння.
Команди допускаються до виконання модифікацій в транспортному забезпеченні ПомилкиДля того, щоб зробити це простіше для своїх роботів, щоб керуватися. Команди КАІСТО встановлюється металевий пристрій з двома важелями в нижній частині автомобіля; DRC-HUBO Я надав одну з важіль, кабельна система працювала так, щоб другий важіль притискав прискорювач. З лівою рукою, робота, що проводиться на машині, і правий кермо. Закінчила цю задачу дуже швидко (процес взяв трохи більше хвилини) і, на відміну від інших команд, не зупинилися перешкоди.
2,2 км Завдання виходу транспортного засобу.
Це одна з найскладніших завдань. Під час підготовки до неї професор О, як він сказав нам, виходив з самого автомобіля кілька разів, щоб зрозуміти, які рухи і частини тіла він був використовувати для цього. Уклав, що «динамічний підхід» буде потрібно. Його команда програмувала DRC-HUBO Так він піднімає руки і тримається на каркасі автомобіля. Робот використовує 100 Ньютонів тяги для кожної руки. Коли руки піднімають тіло роботи, він значно випадає з машини, хоча рух контролюється (завдяки до «динамічного підходу»). Повідомляйте свою красиву рукоділля, щоб вийти з автомобіля в 1:00!
Викладач Ох сказав кілька моторів під час випробування, але проблема була вирішена за допомогою найпотужніших, спеціально виготовлених двигунів. На даний момент робот може виходити з автомобіля менше 4 хвилин, і коли він вже на землі, він отримує на колінах і просувається.
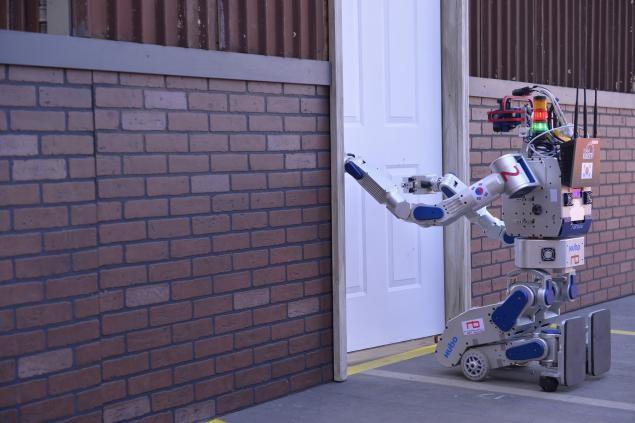
3. У Дверна місія.
На відміну від інших роботів, які мали стояти (і баланс на двох ногах) для виконання цього завдання.DRC-HUBOВін може бути на колінах, що обертають дверкноб. Він глухий використовує другу руку, щоб тримати двері відкритим при обертанні дверної ручки. В менш ніж 2 хвилини він поїхав через дверну проїзд.
4. У Завдання з клапаном.
Зверніть увагу, що на початку відео лідар рухається вгору і вниз, щоб надати операторам можливість сканування місцевості перед роботою. Далі DRC-HUBO Він підійшов до лавки, і він перевернув його верхню частину 180 градусів. Зверніть увагу на свої рухи на 0:20, оскільки ви не можете помітити (кут зйомки не показує нижній корпус роботи, на жаль). У цьому положенні все ще на колінах, робот може піднімати тіло так, щоб він легше контролювати клапан (нехай підставка, якщо це не потрібно?). Роботу сканує місцевості лідаром, визначає позицію і після 3 хвилин виконує завдання. Зауважте, що потрібно лише один поворот, але DRC-HUBO Я зробив два повні повороти! У 2:01 ви можете побачити роботу, що повертається до його нормального положення.
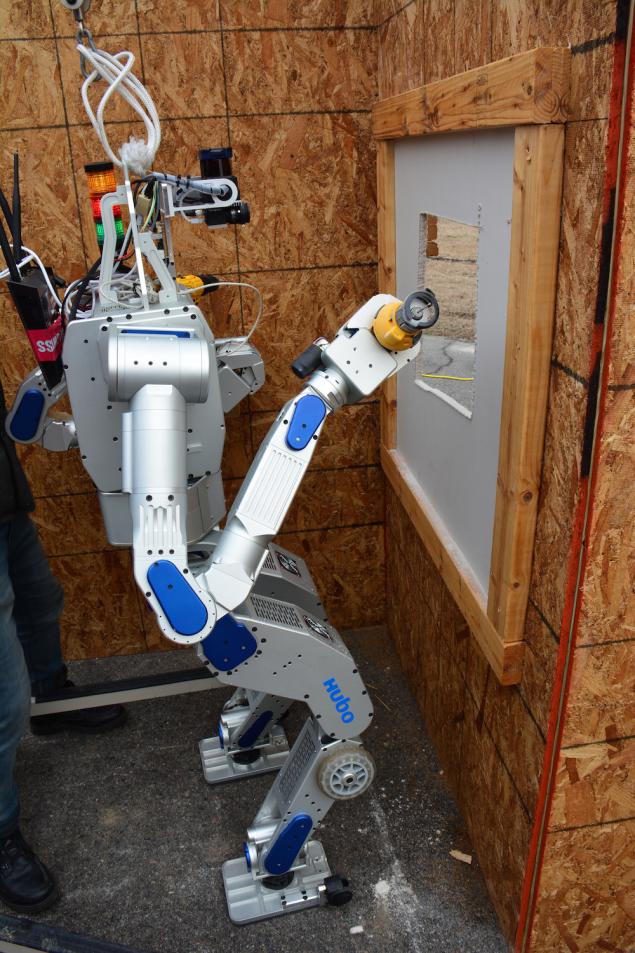
5. Умань Місія з стіною.
Це було складним завданням для більшості команд, оскільки робот повинен тримати дрилі та натиснути кнопку on/off для використання пристрою. DRC-HUBO Я наносив датчики сили на кожну руку, щоб краще захопити інструмент. Ви можете бачити робот, який рухається самостійно і навіть перемістивши буриль на полиці (змітивши інший свердло на шляху), щоб краще захопити його. Під час роботи вдається захопити інструмент, оператори показують місце для перфорації, а робот виконує все інше самостійно. Він відноситься до 20 новихтонів потужності тяги і ви можете побачити, як він використовує його тіло, щоб переміщати свердла відмінно в колі. Завдання займає роботу 11 хвилин.
6. Жнівень Сюрпризна місія.
Це завдання було витягти штепсель і вставити його в інший гніздо. Повідомлення про те, як DRC-HUBO Він сканує підлогу і помітить, що свердло він кинув раніше. Робот перетворює і відштовхує інструмент назад з колінами. Потім він намагається перевернутися і він виглядає так, як він потрапив до стіни. Оператори, очевидно, помітили проблему, він приводить трохи вперед, а потім він може перевернутися. Зрештою, робота підійде до стіни з розеткою, яка кріпиться вище клапана і дверної ручки. Час, щоб повернутися на ноги і ви можете дивитися його від 3:05. DRC-HUBO забирає кілька кроків вперед і після того, як починається завдання. Ми вважаємо, що це було призначене для того, щоб оператори могли краще виглядати на виделці, а рука роботи не захопить її, що зробить завдання неможливим. У той час ви можете побачити це в 7:47, оскільки робот намагається вставити штепсель і пропускає вихід. Після декількох правильних рухів завдання завершено! Займав 13 хвилин і 30 секунд, більше будь-якого іншого завдання.
7. Про нас Місія для переходу через рубль.
DRC-HUBO Він може перемістити коліна вперед або обертати його тулуба 180 градусів і перенести ноги вперед, виступаючи в якості бульдозера відро. І це те, що він робить роботу. Ви можете побачити його, перетворюючи корпус на 0:28. Що виглядає прохолодно. Робот піднімає руки вгору — ймовірно, так що вони не заплутані в сміття. Потім він починає переміщатися через рубу. Це тільки зупиняється на другому місці, коли здається, що шматочок деревини буде захоплюватися в блокі cinder, тому вона виходить трохи зліва, щоб отримати його з шляху. Рухає пластикову трубу вправо. На 4:14 він знову перетворює його на торшер і стоїть перед кроками. Завдання займає менше 5 хвилин, щоб завершити.
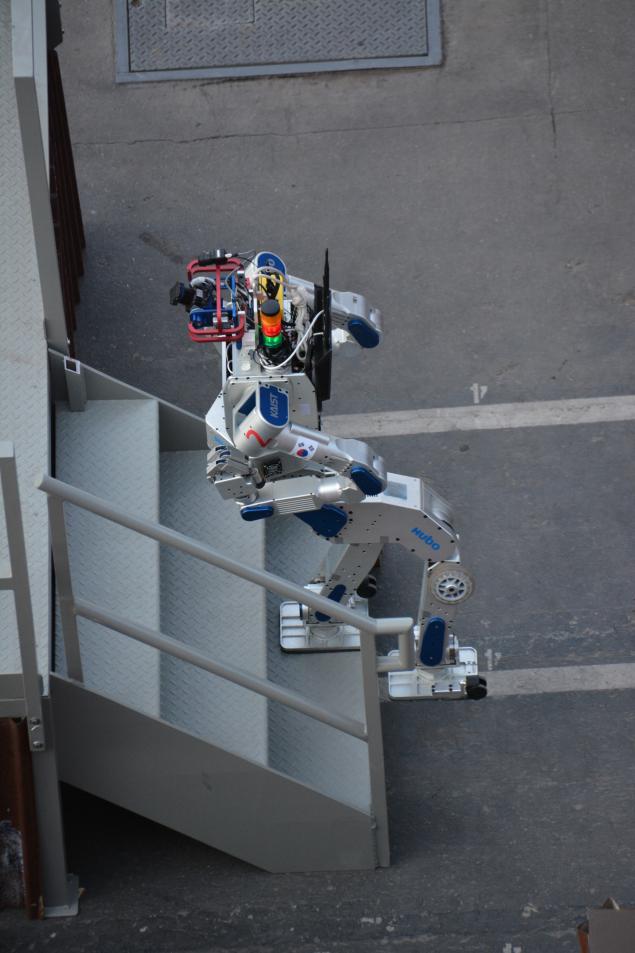
8. У Місія з кроками.
Викладач Ох сказав, що для багатьох завдань, особливо сходження сходів, важливо, щоб робот міг бачити його ноги. Великі роботи, як це. АЛАС Вони ускладнюють це, вони повинні вигинати тіло, що робить балансування важко. DRC-HUBO Вирішує цю проблему дуже розумним способом. Він піднімає сходи назад! Так коліна не блокують камери і можна побачити ноги і землю. Але як він бачить ноги, коли він йде назад? Увімкнення тулуба, звичайно! Ви можете побачити весь процес від 0:26. Роботи на колінах перед сходами, і раптом обертається на ній. Потім він отримує вгору, і в 0:55 ви побачите його перетворювати його torso 180 градусів. Тепер він може відсканувати сходи і почати сходження. Але помітайте, що перед тим, як він займає два кроки до сторони, зліва (1:45)! Після кількох хвилин — що здавалося б, вічність для глядачів — робота нарешті починає підніматися, піднімаючись на останні три кроки один за одним. Очистити! Не менше 7 хвилин DRC-HUBO На платформі. У відео немає звуку, але в цьому випадку екіпаж і аудиторія вибухнула в апеляційному режимі.
КАІСТО зроблені чотири копії DRC-HUBO Вже більше місяця, ніж на змагання. Вони тренуються зовні, в стоянці з нерівними поверхнями і в різних погодних умовах, включаючи сильний сонечко і вітер. "Якщо ми не знімаємо мотузки безпеки, оператори будуть боятися, - сказав професор Ох у майстер-класі з післяоперації.
Він додав, що під час навчання вони виконали всі завдання в обох режимах – стоячому і колінному суглобах (середній час був 30 хвилин). Команда була хорошою при очищенні рубців своїми руками. DRC-HUBOЩо вони не змогли продемонструвати ДТРК ЗакінченняВони також змогли виконати завдання на більш складних поверхнях, ніж у змаганнях.
Ми не змогли показати всі можливості роботи в змаганнях ... це було дуже просто! Професор О, спускаючись від етапу до апеляцій.
Джерело: geektimes.ru/company/robohunter/blog/251898/