1850
由于机器人DRC-HUBO从韩国获得了DARPA的机器人挑战赛
上周六,球队的韩国领先的科技院(KAIST) STRONG>韩国夺得机器人DARPA挑战赛(DRC) STRONG>在波莫纳(CA),当他们的机器人适应人型生物 DRC-HUBO STRONG>,<一个href="http://www.robo-hunter.com/news/v-finale-konkursa-darpa-budut-srajatsya-25-komand">победил 22来自五个不同国家的其他机器人并赢得了200万美元的冠军奖金。

从两足步行机器人把自己在汽车轮子上的能力一直在获得该奖项。许多机器人已经失去平衡,倒在地上,打开门或用钻头的工作。但不要 DRC-HUBO STRONG>。独特的设计,让他来执行任务更快,更重要的是,留在他的脚下(和车轮)。
<大段引用>移动两条腿[机器人]仍不稳定 - 荣格说何哦,机械工程在韩国领先的科学技术学院教授,团队KAIST负责人。 - 如果一件事了问题 - 其结果可能是灾难性的
。 块引用>

他说,公司的人工作时,人形机器人方面具有优势,但他想开发,最大限度地减少跌倒的风险设计的,“我想很多事情,这是非常简单的 - 车轮放在你的腿上”
。
DRC-HUBO STRONG>可以改变你的姿态,站在两条腿,走路,对于对象,这是高,且移动到你的大腿上更稳定的位置到达。
DARPA STRONG>决定举办刚果(金) STRONG>的事件在日本福岛,希望在机器人领域前进了。在<一个href="http://www.robo-hunter.com/news/v-finale-konkursa-darpa-budut-srajatsya-25-komand">соревнование 被邀请到刚果(金)队总决赛,开发半自主机器人和人类的运营商必须对灾难仿真环境共同努力。机器人由大学和企业竞争的大小和形状非常不同的,有的则是机器人的腿,车轮,以及混合动力车。
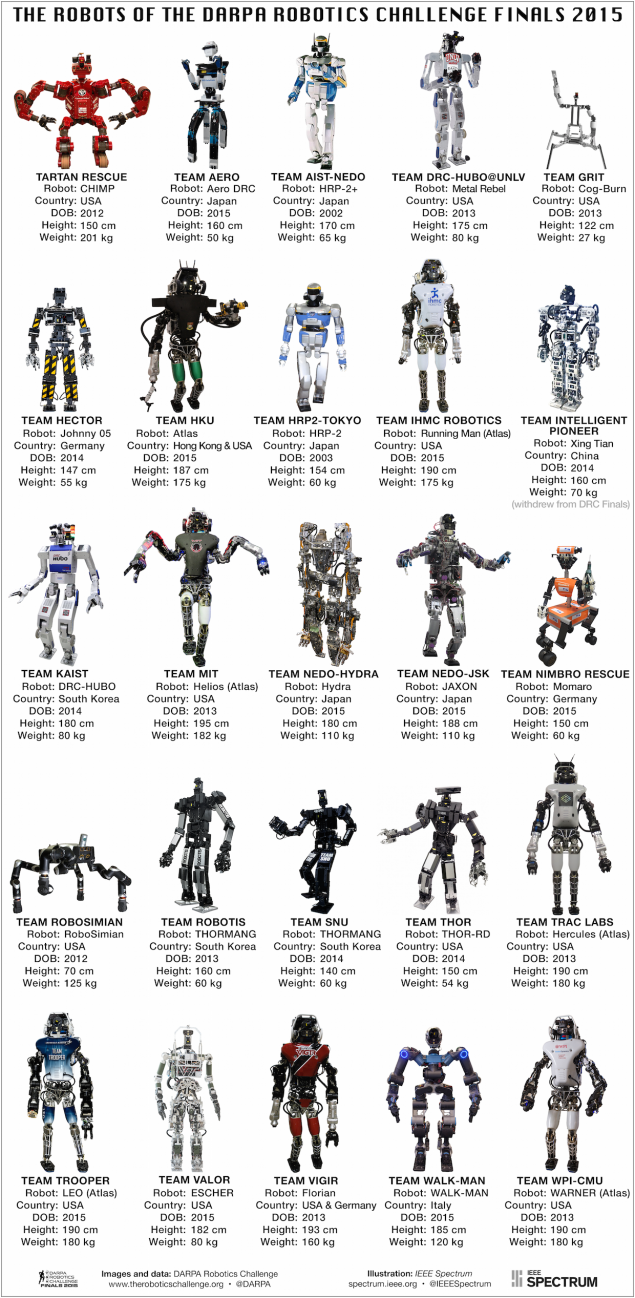
DRC-HUBO STRONG>是赢家,因为它能够执行所有八项任务无差错在最短的时间(44分28秒)。其他球队的表现也不错,但由于延迟他们的机器人,失去的时间。其中最好的 - 小组格子呢救援 STRONG>,其 CHIMP STRONG> - 用腿和跟踪,这是能够返回后回落作业的机器人; Momaro STRONG>从团队波恩大学 - 车轮上的简洁优雅的机器,有一个旋转头,两只手; RoboSimian STRONG>从美国航空航天局喷气推进实验室,有四条腿和运动napominayuschimim瑜伽; <一个href="http://www.robo-hunter.com/news/preobrajenie-robota-atlas-bolshe-nikakih-provodov">ATLAS从球队在 IHMC STRONG> - 由 <发达的大电人形机器人href="http://www.robo-hunter.com/news/robot-atlas-pitaetsya-prinyat-pozu-juravlya-izvestnuy-po-filmu-malchik-karate">Boston动态 STRONG>。

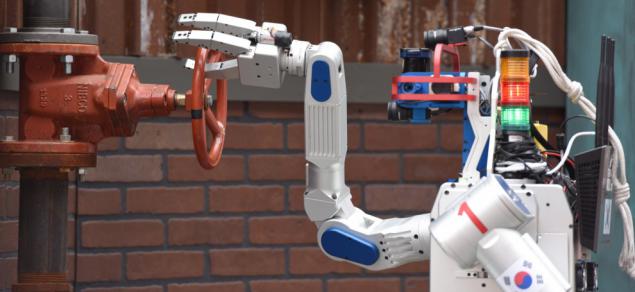
DRC-HUBO执行关闭阀的任务。请注意,他的身体的上半部分被旋转180度。 I>
<大段引用>灵活性 - 是最重要的, - 说DARPA和组织者DRC吉尔普拉特会见记者的经理,评论机器人的设计。 - 机器人,其能够从使用脚的使用车轮的改变配置,可以有更复杂的设计,更重,但它会给这种灵活性
。 块引用>
Ø教授是人形机器人是国际公认的专家。他和他的学生从 KAIST STRONG> 大田(韩国),以改善HUBO其平台几代。下面是一个视频,已经是好几年:当教授,让个人的 2 HUBO: STRONG>
为 DRC决赛 STRONG>他决定显著修改机器人以备可能的就业机会。有关教授在活动结束后的大师班说, DRC-HUBO STRONG>“没有什么不同,它只是一个人形机器人。”但事实上,他的球队的 KAIST STRONG>仔细考虑每一个细节。他估计每个机器人的成本约为50万美元100万美元以下是有帮助的主要特征 DRC-HUBO 以应付的任务:
1。在膝盖轮: STRONG> DRC-HUBO STRONG>对两个膝盖和脚放在车轮轧辊。车轮让机器人能够快速,稳步向前。移动沿地面时,它使用对腿部光学传感器利用光流来测量距离。
2。强劲的发动机: STRONG>和 SCHAFT STRONG> - 机器人,谁赢得了预赛的 DARPA 和<一href="http://www.robo-hunter.com/news/kompanii-stroyashie-armiy-robotov-google">приобретенный通过谷歌 STRONG> , DRC-HUBO STRONG>是一个非常强大的引擎(他们有33 31度自由流动)。由于专门发动机和冷却(风扇和叶片),机器人可以使用高于表示在发动机的规格,以30安培某些情况下,最大速度的3-4倍的电压。
3。兼容性: STRONG>的团队希望让机器人兼容力,扭矩传感器,无需使用传统的自动调节器(担心这会导致不稳定)。因此,一个特殊的放大器被传输到发动机驱动的兼容性的问题。
4。旋转躯干: STRONG> DRC-HUBO STRONG>毛格转动他的身体180度的上部。这意味着机器人的膝盖可以部署到一边,看着它能够在对面的同一时间(你试试吧!)。这种能力不仅工作的时候,他是,但是当他在他的膝盖。该机器人用于多种任务,这个机会需要的时候:驱动车辆,冲压墙上,移动通过瓦砾和楼梯
。
5。长胳膊: STRONG>团队成员 KAIST STRONG>已经意识到手的 HUBO STRONG> 2 STRONG>太短了一些任务,所以他们做了一个长,旋转7度。他们还躲在所有的电缆内,这样他们就不会在周围物体上赶。每个手可握住的重量高达15公斤,并有一个“适应夹持器”,这可能会错过硬和软件。
6。简体感应: STRONG>相反尽显你的头传感器,立体摄像机和激光雷达,它不断地扫描他们的环境(该技术采用机器人<一href="http://www.robo-hunter.com/news/preobrajenie-robota-atlas-bolshe-nikakih-provodov">ATLAS,例如), DRC-HUBO STRONG>是一个简化的视觉系统;算依赖于正常细胞的大部分时间,和激光雷达附着到致动器,扫描周围环境仅在必要时。事实上,该机器人是不是脑袋 - “只有眼睛,说:”一个学生的 KAIST STRONG>
。
7。功率:强>当发动机需要更大的功率,主电源的系统可能不能够提供足够的能量,以在机器的重要组成部分。为了避免这种情况,小组使用的超级电容器,其提供能量到计算机,传输信道,和一些传感器和陀螺仪,即使主电源系统发生故障。
8。专用软件: STRONG>命令使用Linux的Xenomai和专用运动控制框架,这就是所谓的 PODO STRONG>的实时操作系统(开发 KAIST STRONG>)。它还涉及建模环境凉亭。该团队开发了自己的软件侧重于低带宽的运营商和机器人之间的连接不稳定。

现在,让我们来仔细看看 DRC-HUBO STRONG>和方式,他认为带来了胜利给球队从 KAIST STRONG>(如果你想查看全部爆满,这可以通过完成8就业链接,在这里加速版):
驾驶1.设置。
团队被允许进行修改车辆的宝来 STRONG>,他们的机器人已经更易车进出它。团队 KAIST STRONG>安装的金属设备有两个杠杆在汽车底部;当的 DRC-HUBO 按点击杠杆之一,电缆系统的工作,从而第二杆油门按下。用左手抓着一个机器人车,以及管理轮的权利。他执行这个任务非常快(这个过程花了不到一分钟多一点),而且,不像其他球队没有停止过障碍。
2.设置走出车外。
这是最困难的任务之一。在准备吧,呵呵教授,他告诉我们,他来到了车几次明白的身体运动的部分,并使用它。他总结说,它将采取“动态方法”。他的研究小组已经编写的 DRC-HUBO STRONG>让他举起双手扶着机架。该机器人采用推力为100牛顿每手。当机器人臂的主体被抬起,它在很大程度上落在了车,虽然运动被控制(感谢“动态方法”)。注意自己出色的机动走出车在1:00左右!
关于教授说,在开发这一运动烧了几个引擎,但问题解决了用最强大的,专门制造发动机。目前,该机器人可以将车停在不到4分钟,而当他在地球上,他跪下来和叶。
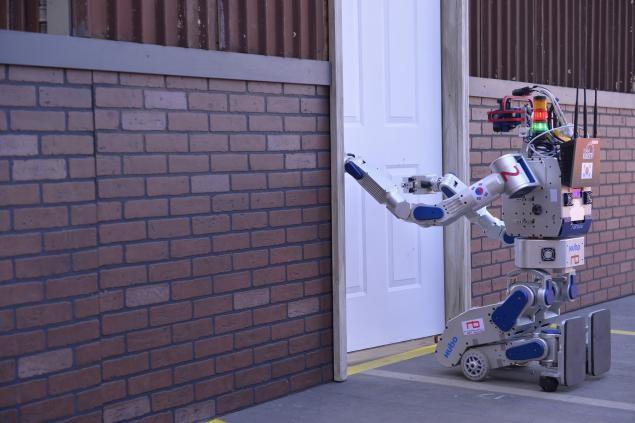
3.设置门。
不像其他的机器人,这是要(和两条腿平衡),执行此任务, DRC-HUBO STRONG>可以站在他的膝盖,转动门把手。他巧妙地用他的另一只手按住开门,直到旋钮旋转。在不到2分钟,他通过门口。
4.设置一个阀门。
需要注意的是在一开始的视频激光雷达上下移动,以使运营商能够扫描的区域在机器人前面。然后,当 DRC-HUBO 以关闭阀门,他把他的上身180度。注意他的动作在0:20,因为你可能没有注意到(拍摄角度不显示机器人的身体下部,可惜)。在这个位置上,仍放在膝盖上,机器人可以提高体内,使其更容易应付螺栓(为什么如果它是不需要忍受?)。机器人扫描用激光雷达的区域,决定了位置和任务执行3分钟后。请注意,只需要一个转,但 DRC-HUBO STRONG>作出两圈!在2:01你可以看到非典在正常位置如何机器人“回报”。
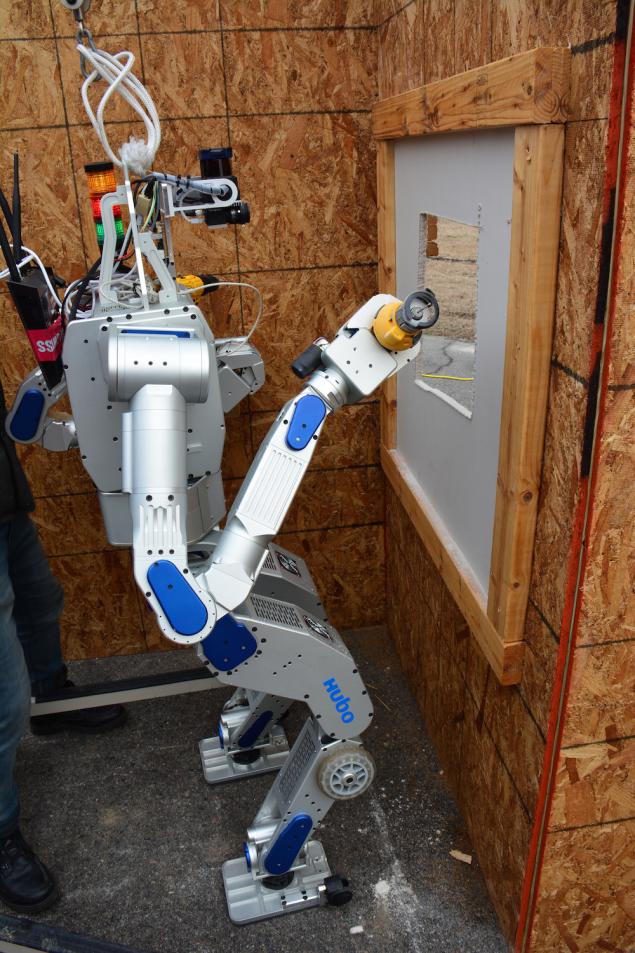
5.指定墙。
这是一个艰巨的任务对于大多数球队,因为机器人必须保持钻,然后按下按钮含/关。要使用该设备。 DRC-HUBO 以施加外力扭矩传感器每手,以更好地捕捉工具。你可以看到机器人的动作,他甚至移动钻架(敲拉上钻)上,为了更好地抓住它。当机器人设法捕捉工具运营商展示的地方穿孔,和机器人的其余部分进行自己。它采用20牛顿的推力,你可以看到他是如何利用自己的身体来移动钻完美的圆。这项工作需要11分钟机器人。
6.设置惊喜。
这项任务包括在拔出插头,并将其插入不同的电源插座。请注意如何在 DRC-HUBO STRONG>扫描地面,注意演练,他拒绝了收购前,它是在它的途中。该机器人转动和移动工具的膝盖。然后,他试图转身就好像他撞到墙上。运营商显然注意到这个问题,它留下一点点前进,然后可以掉头。最后,机器人接近到墙壁插座,其被设定为比上述门把手和闩锁更高。它的时间起床,你可以看它,因为3:05大关。 DRC-HUBO STRONG>需要向前走了几步,并经过一段时间开始工作。他抓住电缆插头;我们认为,它的目的是运营商能够更好地考虑叉子和机器人手臂没有盖过她,这将使这项工作是不可能的。到时候你可以在7:47左右看到它的时候,机器人试图插入插头和插座有惊无险。经过一些纠正动作,任务完成!它花了13分30秒 - 比所有其他作业
7.设置为推广在废墟中。
DRC-HUBO STRONG>可以向前移动你的膝盖或转动180度,躯干和腿往前走,像个推土机刀片。而他也确实做的工作是什么。你可以看到他是如何变成身体约0:28。它看起来很酷。该机器人引起了他的手 - 也许这样他们就不会弄乱垃圾。然后,他开始移动通过瓦砾。他停下来。在那一瞬间,当它好像一块木头卡在煤渣块,所以它变成稍微向左从道路中移除。推动塑料管到右侧。约4:14他转身再次躯干,成为相反的步骤。工作时间不超过5分钟。
8.步骤设置。
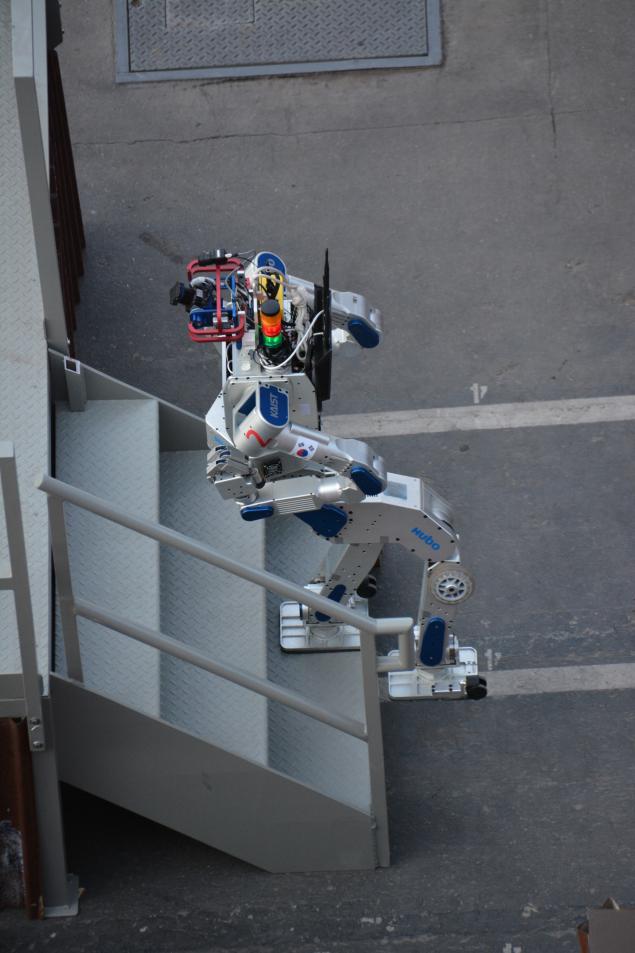
关于教授说,对于许多任务,尤其是提高了楼梯,它使机器人能看到他的腿是非常重要的。大型机械手类型 ATLAS STRONG>也很难做到这一点,他们需要身体弯曲,使其难以平衡。 DRC-HUBO STRONG>解决了这个问题很聪明的办法。他爬上楼梯倒退!因此,他的膝盖不要挡住相机,你可以看到他的脚和地面。但他怎么能看到他的脚抬起时倒退?当然谈到躯干,!你可以看到整个过程,开始的0:26标记。机器人跪在楼梯前,然后突然转身背对着她。然后,他起床0:55,你会看到它是如何躯干转动180度。现在,他可以扫描并开始爬楼梯。但是请注意,他把前两步到一边,左侧(1:45)!过了几分钟 - 这似乎是一个永恒的观众 - 机器人终于开始上涨,克服后,其他的最后三个步骤之一。很明显!在不到7分钟路程的 DRC-HUBO STRONG>是在平台上。在视频中,没有任何声音,但在这一点上,团队和观众爆发出热烈的掌声。
KAIST STRONG>提出了四份 DRC-HUBO 并没有实行系绳一个多月的比赛前。他们被训练在大街上,在停车场与粗糙的表面,并在不同的天气条件,包括强烈的阳光和风力。 “如果我们不消除安全有线运营商将是害怕,” - 说,大约在事件发生后的大师班教授
。
他补充说,在培训期间,他们执行所有任务在两种模式 - 立姿和跪姿(平均时间为30分钟)。该团队善于清理废墟手中的 DRC-HUBO STRONG>,他们未能证明上的 DRC决赛 STRONG> ,他们也能在表面比这就是一个在竞争上执行更复杂的任务。
<大段引用>这是一个遗憾,我们不能显示在竞争中机器人的所有的能力......这一切都太容易了! - сказал关于教授的,下来的舞台的掌声。
块引用>
资料来源:<一href="http://geektimes.ru/company/robohunter/blog/251898/">geektimes.ru/company/robohunter/blog/251898/