1470
测试驱动机器人吸尘器

机器人,它可以在一个住宅区内收集灰尘,以及从俄罗斯市场上相对较近,但已经发生巨大变化,没有夸张已成为最常见的家用机器人在我国和世界各地。但是,由于他们的介绍(2009年)至今(2015)在他们的有用性和这样的收购理由的社会紧张的辩论。毕竟,该设备一直,并仍然相当昂贵 - 它的价格,有时甚至比传统的强力吸尘器的手工清洗3-4倍的价格要高。什么可以说对权力和可能性,原则上从地板上收集灰尘,因为机器人的移动,并通过电池是在目前的技术水平供电不能储存能量的“千瓦”可从插座传统的真空吸尘器尺度。因此,最常见的互联网上,论坛上,只是在商店声事项:
- 的的机器人吸尘器 - ?一个“elektrovenik”或本吸尘器 em>的
- 的他删除了所有或离开大片尚未收割 em>的
- 的如何好是它收集灰尘的地方传递? em>的
- 的什么是智能的程度进行智能清洗? em>的 < LI>的是自动除尘器是能够释放的公寓或房子的地板清洁的所有者,或至少提供了一个机会,让出得少? em>的 LI> UL>
我不得不说,审查最初计划的法国制造商TORNADO e.ziclean,其中一个例子是应该持有的机器人清洁器的能力,原则性评估实施清洗的唯一一个有希望的模式。但在测试过程中出现如果不兴奋不可抗拒的兴趣 - 为您在这个类别中的任何更多的设备用于机器人的功能更全面的印象。这是支持和周围一群谁是全天候准备争论其他模型的优点和缺点,个体生产者的球迷形成。其结果是,增加了两个参与者的测试:在俄罗斯和Iclebo艺术巧妙的与清洁V系列非常受欢迎,正好是我们所掌握。基于这些机器人的特性,以获得不只是比较和不同的结构和算法概念的对抗。我下车两个电刷吸尘器用单刷,具有串行地图室混沌运动模式,吸尘器具有横向电刷相对于所述运动将与具有V形结构的真空吸尘器竞争。
随后,我们在逻辑上都需要进行最后的图表客观的测量和机器人的特点的结果,简化了未来的机器人宠物的设备选择。我们计划每个这样的测试对评级市场的机器人的效率和最佳比例“价格 - 质量”的宗旨后更新它。但是,这篇文章在详细审查Iclebo艺术和聪明和洁净的V系列一直在幕后,因为他们已经长期存在于市场和审查设计与外观不够,所以这些产品仅限于测试程序。
清洗力学 H3>
传统的吸尘器,它是连接到家用电源插座,早已不是什么新鲜事。他是那么坚定地进入了现代人的日常生活中被认为是不言自明的。考虑从他的自动清洁的不同。
经典吸尘器可以很容易地在家用电器任何商店中找到,收集由一个强大的泵产生通过装置的抽吸部分泵送大量空气尘埃费用真空。这是移动的真空吸尘器具有一个相对高的速度内的空气,带走所有这些都是在地板或其它待清洁表面。内的灰尘和污物被过滤器,其可以具有非常不同的设计被保留。近年来成为当被污染的空气被在圆柱形罐紧固空气的一种特殊的方式流动时所产生的离心力的装置清洗日益流行滤波器气旋。这是非常方便的,所以不要不需要购买额外的尘袋 - 你只需要在清洗后扔掉的污垢从塑料容器。它是这样构成的参考手册吸尘器伊莱克斯,这是我们用来与机器人吸尘器比较。

普通家用吸尘器伊莱克斯旋风和2200 W. em>的
作为一名普通的家用吸尘器变成一个电源插座,那么实际上能够获得的能量比积极享受所有的“无限”的源头,无一例外,厂家在设备的设计,以及用于营销目的。吸尘器电源线具有高容量,这印证了非竞争和我们党 - 它的容量为2,2千瓦
这里有市场上的机器人的第一特征中,设计为自主清洁。该房间与清洁同步的机器人的自运动必然会使用内置电池的事实。因此,获得安全和相对便宜的,理由是,没有必要提供一个极其复杂的,因此,昂贵的机制,以防止缠绕电缆。清洁经典吸尘器时,通常我们摆正电缆,并确保它不进入吸入区或拔下电源线。在机器人的情况下,今天做的很成问题,最后的产品没有花费数十万卢布。因此,只有电池!同时内置电池的平均容量为2至6阿。此库存是仅足以提供吸力在30-50瓦特的水平。其结果是,只有这样才能确保高清洗效率。 - 额外的设备旋转刷或真空吸尘器,它已成为时尚,近年来,2
从常规机器人吸尘器的第二个重要的区别 - 这就是它被单独清洗,并且不需要人工干预。在这里的设备来导航空间并覆盖整个区域不留下未清除的区域,以确保最大灰尘收集的前沿。这种能力,又依赖传感器系统上,该计算块具有或不具有机会映射室和寄存器中已被删除的存储器区域,以确定没有清洗的面积和计划他们一致的清洗。讽刺的是,它也是一个人用手工清洗很重要,因为我们往往在收集灰尘,为什么不罕见和遗漏在常规真空吸尘器的工作流程急于。更有趣的找出收集灰尘的方法不同,实际效果。
导读机器人吸尘器TORNADO H3>
产品概述开始配置。开箱后,买方将引导机器人和一切所必需的其正常的操作。

全套可称为高于平均水平。 em>的
除了强制性的机器人基座充电他与电源,说明和提示,抛光机,完成本:一组更换边刷,虚拟墙,控制台,使得管理吸尘更加方便和舒适,连螺丝刀
。
现在,我们把目光转向设计。在这里,开发者们想出了很多有趣的。

所以龙卷风看起来从上面。 em>的

从后面。刷搁在地板上,并准备工作。 em>的

的真空吸尘器的底部的设计。 em>的
首先,TORNADO配有两把刷子。多一个,而且很可能会收集较大的杂质,而第二 - 更紧凑,很显然,对污垢细粒


检索清洁手腕一抖刷 em>的

的对于每个刷提供了一种用于污染物的容器中的运动的信道。 em>的
值得注意的是,每个刷工作在一个容器隔室,用于收集灰尘。的一个多 - 从大刷子一个宽的通道,和一个非常小的隔室(过滤器),用于从所述小刷子一个窄通道

可拆卸防尘槽有两个集装箱。 em>的
第二个主要结构特点是涡轮泵。具有非常紧凑的尺寸,它旋转以8000转/分,和制造商的保证提供了迄今前所未有吸力。

的泵涡轮紧凑,直接放入一个容器收集灰尘。 em>的
26973527
这里是泵。清晰可见的涡轮叶片。 em>的

联系泵的功率。 em>的

的空气通过一个特殊的过滤器绘制。 em>的
作为清洁器的另一个特征是延长了超细纤维布上的机器人的底部。在这种情况下,机器人不仅扫和抽真空,和擦地板。重要的别忘了清洗周期之前,濡水布。

在理论上一个微纤维布的喷嘴让您免去更清洁。 em>的
这也是适当的提刷附件的设计。她是非常可靠的,耐用,因为它使用金属为基的轴承。

支持橡胶刷。 em>的

但是下面躺着一个滚动轴承。 em>的
机器人的设备的其余部分是相当标准。

的该机器人装配有带光学传感器逃离与日常用品的冲突。 em>的

远程方便,信息量大。 em>的

但是,当你在看显示屏觉得有点缺乏可读性,但一般是没有问题的。 em>的

充电底座看起来有点奢侈。半透明的玻璃通过可视的电子灌装。联系方式的真空推充电。 em>的

此设备可帮助机器不能启动,在那里有他并不需要输入。 em>的
测试程序 H3>
根据提出了在文章,以及所需的最终结果的位置的开始,该问题是明显的测试程序。
到地板的整个表面已经被完全清除的污染,机械手必须将赋有两个主要的属性。首先,它是收集各种高品质的家居污染的基本能力。第二个 - 是在房间里和委托留下未清除的区域的面积,整个清洗计划,以导航的能力。正是这些能力,我们将在两个试验检查相同的名称。而且,这些考虑可用于在任何结构的真空吸尘器。
要检查的污物收集的质量,我们已经准备了一个小舞台。这一指标的尺寸来衡量的特殊发挥不了作用。最重要的是污染物的百分比,该装置能够收集。萨米污染我们试图模拟尽可能接近真实。在地板上的每个房子有一个细小的灰尘 - 因为她做了一顿 - 这是最难收集的灰尘。经常发现碎片较大型屑或砂街 - 以说唱为他们的糖和面包屑。当然,要获得下轮可以和做一些具体的事情,所以我们增加了松针和纸片。所有这一切都混合在人数大致持平,并得到50克测试混合物。硬币按钮和我们特意加入到我们的“脏物”并没有成为(如做测试员等刊物),因为我们深信,在创建机器人清洁器是不是从你的地板收钱和其他有用的东西等等都是比较大的对象。观察你扔了一个常规的真空吸尘器,并了解什么是污垢的具体情况,从地面采集的成分 - 不是硬币

为“地狱般的”混合原料。 em>的

总50克对“仰人鼻息”的机器人。 em>的

均匀分散各地的舞台上人工污染。一切准备就绪进行测试。 em>的
因此,具有有条件泥开始50克,我们运行的真空吸尘器的工作循环,之后权衡所有,他能够收集并确定所收集的灰尘的百分比。立即说,这个测试的性质取决于机器人的导航系统上。它可以是能够移动仅沿着混沌的轨迹 - 在这种情况下,它提供了一种用于清洗时间为5分钟。 A可以提供更先进的视觉,因此,持续清洁该部位 - 然后就会离开,直到事情带走。它仍然为1比5分钟快,作为机器人的两倍,并且在同一地方不传送。
第二个测试旨在探讨清洁剂来清洁最大面积的预测能力。拿着它非常困难,所以我们已经制定了评估的这一“标志”制度。它位于一个事实,即四个彼此间(房间在公寓)为63平方米,总面积进行通信。米,我们随机的,但在同一时间均匀地分散的纸片。开始在工作循环的机械手,然后计数的纸收集的多条数。其结果是收获面积的基础上,假设比例,如果机器人将覆盖整个区域,这将汇集所有的作品,因此,他将通过它只能通过报纸,不删除整个区域的可能性,趋向于零。

的测量百分比收获面积将通过收集纸片的数量进行。 em>的
第三个练习 - 克服障碍。许多在公寓或房子有porozhki板条或地板上,所以重要的是通过他们将真空吸尘器的能力。由于本次测试将检查我们的成员是如何通行的一部分。
而第四个测试更多的是演出的性质,但是可以让你直观地评估机器人的操作过程中发生的物理过程。换句话说,我们试图寻找在吸尘器内部的履行其职责时,看灰尘是否被吸收。我们通过提供机器人清洗玻璃这样做。照片和视频拍摄进行了在玻璃的背面,使之正确立刻是否那些怀疑论者谁相信这样一类的机器人平庸Electros清楚。
测试№1。我们正在探索,收集污染 H3>
的能力 直接进入到实际测试。在我们的舞台'50分散污垢,运行在5分钟的会话机器人和评估结果。
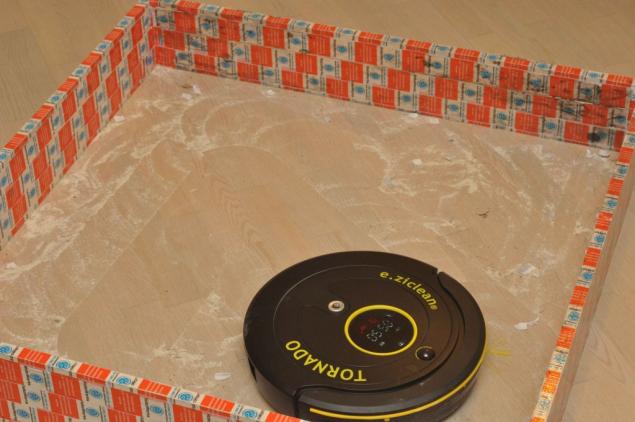
在收割的时候可以清楚地看到,如粪土被吸收稳步清洁。 em>的

的种植周期长的表面5分钟后,一个普遍的看法。 em>的
在你评估收获的质量,我会说的主观机器人的印象几句话。整体印象 - 它实际上是一个吸尘器。这表现在灰尘实时的消失,以特有的声音。如果你把一只手真空吸尘器的操作过程中回来了,那么显然就觉得足够强大的气流 - 短龙卷风叫他故意的。移动机器人真随机的,但这种混乱是非常有序且该设备不仅速度快,“覆盖”的整个区域,但也试图进一步沿着壁延伸。即清洁合理的表现,完全正当他的机器人轮廓。
现在,实际上,他的工作成果。该照片清楚地表明,总体而言,在主区域被移除,而对其拐角处,也有一定的困难。龙卷风是由不愿造成接近墙壁。正如我们在前面保险杠调查部分指出放置红外距离传感器,其保护与家具和各种障碍物碰撞的真空吸尘器,我们认为设置它们(或因此说,软件)粗糙,有一大截,使机器人明显到达到墙壁。长边刷保存,但并非总是如此。因此,我们有我们所拥有的。
在包里轻轻地,小心地倒“的结果”,重量的平衡,将它们转移到会计核算制度不包装后

工作循环后的容器。大部分的污染在里面。 em>的

的碎片在一个浅海湾,和一个大海湾 - 大,小,太...... em>的

我们收集的灰尘进行称重。 em>的
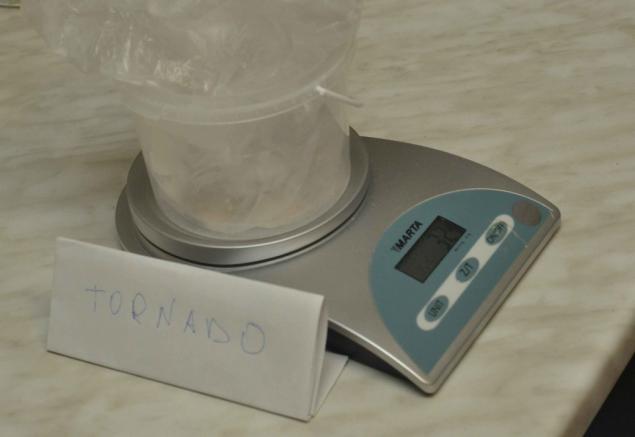
获取32克,这是64%的原先分散在各地的舞台上的污垢。 em>的
公平地说,我们敢于所有的瓢,这是不够幸运,在机器人的肚子,并添加到删除的总重量。其结果是乍看之下有点突兀,但逻辑 - 45克。即





















































