Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
1534
0.4
2015-12-19
Тест-драйв роботов-пылесосов

Роботы, умеющие собирать пыль в жилых помещениях, широко вышли на Российский рынок относительно недавно, но уже успели сильно эволюционировать и без преувеличения стали самыми распространенными бытовыми роботами в нашей стране и во всем мире. Однако с момента их появления (2009 год) по настоящий момент (2015 года) в обществе не утихают споры об их пользе и оправданности такого приобретения. Ведь, устройство как было, так и осталось достаточно дорогим - его стоимость, порой, превышает цену классического мощного пылесоса для ручной уборки в 3-4 раза. Чего нельзя сказать о мощности и принципиальной возможности собирать загрязнения с пола, поскольку робот мобилен и питается от аккумуляторов, которые на текущем уровне развития технологий не способны запасать энергию в «киловатных» масштабах, доступных из розетки для обычных пылесосов. Поэтому особенно часто на просторах интернета, форумах, да и просто в магазинах звучат вопросы:
- Робот-пылесос — это «электровеник» или настоящий пылесос?
- Он убирается везде или оставляет большие области неубранными?
- Насколько хорошо он собирает пыль там, где проехал?
- Какова степень его разумности для выполнения интеллектуальной уборки?
- Действительно ли автоматизированный сборщик пыли способен освободить владельца квартиры или дома от уборки полов или хотя бы предоставить возможность убираться реже?
Скажем сразу, изначально планировался только обзор многообещающей модели TORNADO от французского производителя e.ziclean, на примере которого и предполагалось провести принципиальную оценку возможностей роботов-пылесосов по выполнению уборки. Но в процессе испытаний возник неудержимый интерес, если не сказать азарт — проверить в деле еще какие-нибудь устройства данной категории для формирования более целостного впечатления о возможностях роботов. В пользу этого говорят и сформировавшиеся вокруг отдельных производителей группы поклонников, готовые круглосуточно спорить о достоинствах одной модели и недостатках другой. В результате добавились еще два участника тестирования: весьма популярные у нас в России Iclebo Arte и Clever&Clean V-series, случайно оказавшиеся в нашем распоряжении. Исходя из особенностей данных роботов получилось не просто сравнение, а противостояние разных конструкций и алгоритмических концепций. Сошелся двух-щеточный пылесос с одно-щеточными, хаотический режим движения с последовательным по карте помещения, пылесосы с поперечным расположением щеток по отношению к движению будут соревноваться с пылесосом, имеющем V-образное расположение.
Впоследствии же мы логично пришли к необходимости создания итоговой диаграммы с результатами объективных измерений и характеристик роботов, упрощающей выбор устройства будущего робототехнического домашнего питомца. Ее мы планируем обновлять после каждого подобного теста с целью составления рейтинга эффективности и оптимальности по соотношению «цена-качество» представленных на рынке роботов. Правда, в данной статье подробный обзор Iclebo Arte и Clever&Clean V-series остался за кадром, поскольку они уже давно присутствуют на рынке и обзоров конструкций с внешним видом хватает, поэтому ограничились для данных продуктов только тестовой программой.
МЕХАНИКА УБОРКИ
Обычным пылесосом, подключаемым к бытовой розетке, сейчас никого не удивишь. Он настолько плотно вошел в обиход каждого современного человека, что воспринимается как само собой разумеющиеся. Рассмотрим чем отличается от него автоматический уборщик.
Классический пылесос, который можно легко найти в любом магазине бытовой техники, собирает пыль засчет разряжения, создаваемого мощным насосом, прокачивающим большой объем воздуха через всасывающую часть устройства. Этот самый воздух, двигаясь внутрь пылесоса с относительно большой скоростью, увлекает за собой все, что лежит на полу или любой другой очищаемой поверхности. Внутри пыль и загрязнения удерживаются с помощью фильтра, который может иметь самую разную конструкцию. В последнее время все более популярными становятся фильтры циклонного типа, когда загрязненный воздух очищается с помощью центробежной силы, возникающей в цилиндрическом резервуаре при закручивании потока воздуха специальным образом. Это очень удобно, так не не требуется дополнительно покупать мешки для сбора пыли — необходимо просто выкинуть грязь из пластикового контейнера после уборки. Именно так устроен референсный ручной пылесос Electrolux, который мы использовали для сравнения с роботами-пылесосами.

Обычный бытовой пылесос Electrolux циклонного типа и мощностью 2200 Вт.
Поскольку обычный бытовой пылесос включается в розетку, то по сути имеется доступ к «неограниченному» источнику энергии, чем активно пользуются все без исключения производители при проектировании устройств, а также и в маркетинговых целях. Пылесосы с питанием от розетки имеют высокую мощность, что подтверждает и наш внеконкурсный участник — его мощность составлять 2,2 кВт.
И вот здесь возникает первая особенность представленных на рынке роботов, предназначенных для автономной уборки помещения. Дело в том, что для самостоятельного перемещения по помещению с одновременной уборкой робот неизбежно будет использовать встроенный аккумулятор. Так получается безопасно и относительно дешево по причине того, что нет необходимости предусматривать чрезвычайно сложные и, как следствие, дорогие механизмы, предотвращающие запутывание кабеля. При уборке классическим пылесосом мы обычно сами расправляем кабель и следим, чтобы он не попадал в зону всасывания и не выдергивался из розетки. В случае с роботом на сегодняшний день это сделать весьма проблематично, чтобы конечный продукт не стоил сотни тысяч рублей. Поэтому только аккумулятор! При этом среднестатистическая емкость встроенного аккумулятора составляет от 2 до 6 А*ч. Этого запаса хватает только на обеспечение мощности всасывания на уровне 30-50 Вт. В результате единственный способ обеспечить высокую эффективность уборки — дополнительное оснащение пылесоса вращающейся щеткой или, как стало модно в последнее время, двумя.
Второе же важное отличие робота от обычного пылесоса — это то, что он убирается самостоятельно и не требует участия человека. Тут на первый план выходит способность устройства ориентироваться в пространстве и покрывать всю площадь без оставления неубранных площадей для обеспечения максимального сбора пыли. Умение это, в свою очередь, зависит от системы датчиков, вычислительного блока, имеющего или не имеющего возможность составлять карту помещения и регистрировать в памяти те области, которые убраны, определять не убранные площади и планировать их последовательную уборку. Как ни странно, это также важно и для человека при ручной уборке, поскольку нам свойственно торопиться в процессе сбора пыли, отчего не редки и пропуски при работе обычным пылесосом. Тем интереснее выяснить реальную эффективность разных способов сбора пыли.
ОБЗОР РОБОТА-ПЫЛЕСОСА TORNADO
Обзор устройства начнем с комплектации. Открыв коробку, покупатель найдет непосредственно робота и все, что необходимо для его штатной работы.

Комплектацию можно назвать выше средней.
Помимо обязательных робота, зарядной базы для него с блоком питания, инструкции и насадки-полотера, в комплекте присутствуют: набор запасных боковых щеток, виртуальная стена, пульт, делающий управление пылесосом более удобным и комфортным, и даже отвертку.
Теперь обратим свой взор на конструкцию. Здесь разработчики придумали немало интересного.

Так ТОРНАДО выглядит сверху.

А так сзади. Щетки упираются в пол и готовы к работе.

Конструкция нижней части пылесоса.
Во-первых, ТОРНАДО оснащен двумя щетками. Одна побольше и предназначена, по всей видимости, для сбора более крупных загрязнений, а вторая — более компактная, судя по всему, для мелких фракций грязи.


Щетки извлекаются для чистки легким движением руки.

Для каждой щетки предусмотрен свой канал для движения загрязнений в контейнер.
Примечательно, что каждая щетка работает на свой отсек контейнера для сбора пыли. Тот, что побольше, — для широкого канала от большой щетки, а совсем маленький отсек (под фильтром) для узкого канала от маленькой щетки.

Съемный контейнер для сбора пыли с двумя емкостями.
Второй большой конструктивной особенностью является турбина насоса. При своих очень компактных размерах она вращается с частотой 8000 об/мин и по заверениям производителя обеспечивает невиданную доселе мощность всасывания.

Насос с турбиной компактен и размещается прямо в контейнере для сбора пыли.

А вот и сам насос. Хорошо видны лопатки турбины.

Контакты на насосе для его питания.

Воздух всасывается через специальный фильтр.
В качестве еще одной особенности пылесоса является возможность закрепить тряпочку из микрофибры на нижней части робота. В этом случае робот не только подметет и пропылесосит, но и протрет полы. Главное не забыть салфетку смочить водой перед циклом уборки.

Насадка с салфеткой из микрофибры в теории позволяет убраться еще чище.
Также уместно отметить конструкцию крепления щеток. Она очень надежна и долговечна, поскольку в основе нее используются металлические подшипники качения.

Опора щетки резиновая.

А под ней скрывается подшипник качения.
В остальном оснащение робота вполне стандартное.

Робот оснащен поясом оптических датчиков, спасающих от столкновений с предметами обихода.

Пульт удобен и информативен.

А вот при взгляде на дисплей чувствуется небольшой недостаток читаемости, но в целом проблем не возникает.

Зарядная база выглядит немного экстравагантно. Стекло полупрозрачное, через которое видна электронная начинка. Контакты для зарядки пылесоса нажимные.

Это устройство помогает аппарат не пустить туда, куда ему не следует заезжать.
МЕТОДИКА ИСПЫТАНИЙ
Исходя из тех вопросов, которые были поставлены в начале статьи, а также с позиции желаемого конечного результата, очевидна программа испытаний.
Для того, чтобы вся поверхность пола была полностью очищена от загрязнений, робот должен быть наделен двумя главными свойствами. Прежде всего, это принципиальная способность качественно собирать всевозможные бытовые загрязнения. И второе — это умение ориентироваться в помещении и планировать уборку всей вверенной площади, чтобы не осталось неубранных областей. Именно эти способности мы будем проверять в двух одноименных испытаниях. Причем данные соображения справедливы для пылесосов любых конструкций.
Для проверки качества сбора грязи мы подготовили небольшую арену. Размеры для измерения данного показателя роли особой не играют. Важен именно процент загрязнений, который устройство способен собрать. Сами загрязнения мы постарались смоделировать максимально приближенными к реальным. В каждом доме на полу найдется мелкодисперсная пыль — в качестве нее выступила мука — именно такую пыль трудней всего собрать. Частенько встречается мусор покрупнее типа крошек или уличного песка — за них отдувались сахарный песок и панировочные сухари. Конечно же, попасть под колеса может и совсем что-то специфическое, поэтому мы добавили еловых иголок и кусочков бумаги. Все это смешали приблизительно в равных количествах и получили 50 грамм испытательной смеси. Монеты пуговицы и подобные им относительно крупные предметы мы намеренно добавлять в нашу «грязь» не стали (как это делают тестеры других изданий), поскольку убеждены, что робот-пылесос создан совсем не для того, чтобы собирать деньги или другие полезные предметы с вашего пола. Понаблюдайте за составом того, что вы выбрасываете из обычного пылесоса, и поймете какую специфику имеют загрязнения, собираемые с пола — отнюдь не монеты.

Сырье для «адской» смеси.

Итого 50 грамм на «съедение» роботу.

Равномерно разбрасываем искусственную грязь по арене. Все готово к испытаниям.
Соответственно, имея на старте 50 грамм условной грязи, мы запускаем пылесос в рабочий цикл, после которого взвешиваем все то, что он сумел собрать и определяем процент собранной пыли. Сразу оговорюсь, что характер данного испытания зависит от системы навигации робота. Он может уметь двигаться только по хаотичной траектории — в этом случае ему предоставляется время для уборки 5 мин. А может быть наделен более продвинутым зрением и, как следствие, убирать площадь последовательно — тогда он будет убираться, пока все не уберет. Это все равно будет быстрее 5 мин, поскольку два раза робот по одному и тому же месту не проезжает.
Второе испытание ставит целью исследовать способность интеллектуального уборщика очистить максимальную площадь. Провести его весьма непросто, поэтому мы разработали для этого «маркерную» систему оценки. Она заключается в том, что по четырем сообщающимися друг с другом помещениям (комнатам в квартире) общей площадью 63 кв. м. мы хаотично, но в то же время равномерно разбрасываем кусочки бумаги. Запускаем робота в рабочий цикл и после считаем количество собранных бумажек. В результате получим процент убранной площади на основе допущения, что если робот покроет всю площадь, то он соберет все кусочки и при этом вероятность того, что он он проедет только по бумажкам, не убрав всю площадь, стремится к нулю.

Измерение процента убранной площади будем производить через количество собранных кусочков бумаги.
Третье упражнение — преодоление барьеров. У многих в квартире или доме есть порожки или декоративные накладки на полу, поэтому немаловажным является умение пылесоса через них переезжать. В рамках данного испытания проверим насколько наши участники проходимы.
Ну и четвертое испытание носит скорее характер шоу, тем не менее позволяет визуально оценить физические процессы, происходящие при работе робота. Другими словами мы попробовали заглянуть внутрь пылесоса во время выполнения им своих прямых обязанностей, чтобы узнать действительно ли всасывается пыль. Сделали мы это, предложив роботу очистить стекло. Фото- и видео-съемка велась с обратной стороны стекла, чтобы стало сразу понятно правы ли те скептики, которые считают такую категорию роботов банальными электровениками.
ТЕСТ №1. ИССЛЕДУЕМ СПОСОБНОСТЬ СОБИРАТЬ ЗАГРЯЗНЕНИЯ
Переходим непосредственно к практическим испытаниям. Разбрасываем 50 г. загрязнений по нашей арене, запускаем робота на 5-минутный сеанс работы и производим оценку результатов.
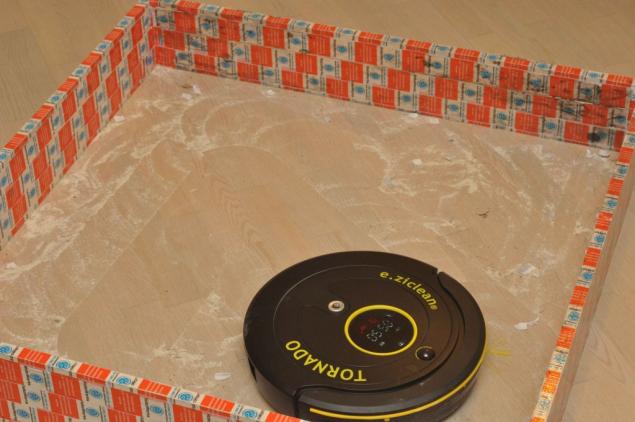
В самом начале уборки хорошо видно, как грязь уверенно поглощается пылесосом.

Общий вид убранной поверхности после рабочего цикла длиной в 5 мин.
Прежде, чем оценивать качество уборки скажу несколько слов о субъективных впечатлениях от работы робота. Общее впечатление - он действительно пылесосит. Проявляется это как в исчезновении пыли в реальном времени, так в характерном звуке. А если поднести руку к задней части пылесоса во время работы, то отчетливо чувствуется достаточно мощный поток воздуха — словом Торнадо его назвали неспроста. Перемещается робот действительно хаотически, однако хаотичность эта весьма упорядочена и устройство не только быстро «покрыло» всю площадь, но и пыталось дополнительно проходить вдоль стен. То есть пылесос вел себя разумно и вполне оправдывал свой робототехнический профиль.
Ну а теперь, собственно, о результатах его работы. На фото хорошо видно, что в целом основная площадь убрана, однако с углами существуют некоторые трудности. Вызваны они нежеланием Торнадо подходить близко к стенам. Как мы отмечали в обзорной части, на переднем бампере расположены инфракрасные датчики расстояния, которые оберегают пылесос от столкновения с мебелью и различными препятствиями и нам показалось, что настроены они (или так написано программное обеспечение) грубовато, с большим запасом, отчего робот заметно не доезжает до стен. Длинные боковые щетки спасают, но не всегда. В итоге имеем то, что имеем.
Аккуратно и тщательно ссыпаем «результат работы» в пакетик и взвешиваем на весах, предварительно переведя их в режим не учета тары.

Контейнер после рабочего цикла. БОльшая часть загрязнений оказалась внутри.

Мелкий мусор в мелком отсеке, а в большом отсеке — крупный и… Тоже мелкий.

Собираем пыль для взвешивания.
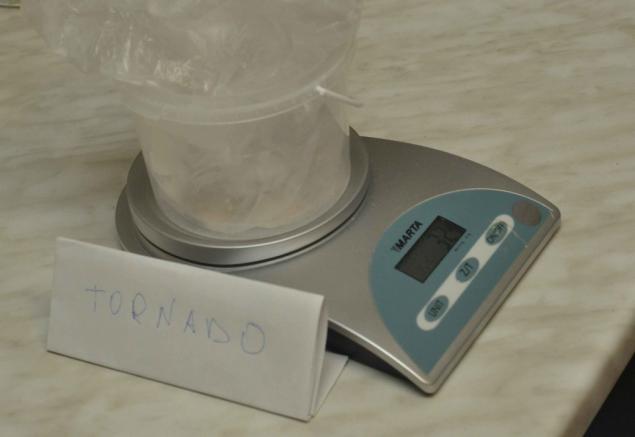
Получаем 32 грамма, что составляет 64 % от изначально разбросанной по арене грязи.
Справедливости ради мы смели все в совок, чему не посчастливилось оказаться у робота во чреве, и добавили к общей массе убранного. Результат оказался на первый взгляд немного неожиданным, но логичным — 45 грамм. Т.е. приблизительно 5 грамм осталось в устройстве, несмотря на выметание из контейнера.

Недоубранное.
Загрязнения остаются на щетке, в каналах и на внутренних поверхностях. Считаем правильным засчитывать все-таки только то, что выскребается из контейнера, поскольку любой владелец данного устройства в подавляющем большинстве случаев желал бы выбрасывать грязь только из пылесборника, а не счищать ее со всего пылесоса после каждой уборки. Чистить робота полностью, безусловно, надо, но делать это можно раз в несколько уборок (например раз в неделю), поэтому в итоговую таблицу будет попадать исключительно улов контейнера.
Вот тут и возник азарт, о котором я упомянул в начале статьи. А что же другие роботы-пылесосы смогут продемонстрировать?
Первым после Торнадо подходит к «снаряду» Clever&Clean V-series. В отношении навигации он работает по той же схеме — режим движения хаотический. Те же 50 грамм, 5 мин напряженной работы и…

Визуально робот собирает загрязнения не так уверенно, как Торнадо.

Хотя результат получился практически тем же, а углы выглядели даже более убранными.
В принципе, визуально по основной площади результат тот же, углы даже более ухожены. И мы приготовились уже производить контрольное взвешивание, как нам робот Clever&Clean преподнес неожиданный сюрприз. Когда пылесос поднял один из испытателей, нашему взору предстала вот такая картина.

Оказывается, по каким то причинам аппарат не смог всосать в себя листочки бумаг. Внешне они пропадали с пола после прохода пылесоса, но как выясняется они заботливо собирались машиной и таскались под днищем на протяжении всей уборки. Тем более это выглядит странным, что у данной модели тоже стоит мощный насос и воздух протягивается через контейнер субъективно не менее интенсивно, чем у Торнадо. А гудит Clever&Clean во время уборки так и вообще как взрослый 2-х киловатный пылесос. Попробуем проанализировать и разгадать причины происходящего в процессе теста №4, а пока взвешиваем содержимое контейнера.


V-series после работы. V-образное расположение щеток показало относительно невысокую эффективность.
Результат — 28 грамм, что означает 56%. Очевидно, что если бы не бумага, оставшаяся, на полу после работы, данный образец технической мысли вполне мог бы повторить результат Торнадо, а так — проигрыш в 8%.
С третьим участником теста все сложнее. Iclebo Arte отличается от Торнадо и V-серии гораздо более продвинутой системой навигации. Он оснащен видеокамерой, которая по заверениям производителя позволяет составлять карту помещения и прокладывать маршрут, отчего робот может перемещаться по квартире не только в хаотическом режиме, но и последовательно по зигзагообразной траектории, обеспечивая отсутствие неубранных областей. «Всевидящее око» также помогает более уверенно возвращаться на базу. Поэтому мы посчитали, что просто обязаны проверить эффективность робота в двух режимах: хаотической и последовательном.
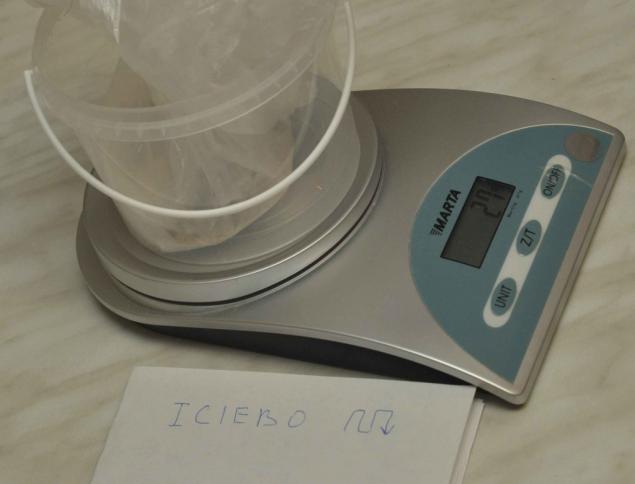
Начнем с последовательно. Примечательно, что при такой схеме испытания возникает еще одна характеристика: время уборки. Если в хаотическом режиме в общем случае робот убирается пока не сядет аккумулятор, то в последовательном он закончит тогда, когда все уберет. Поэтому приходится говорить о времени.

Пылесос, действительно, по порядку прошел всю отведенную ему для уборки площадь. Продолжительность уборки составила 1 минуту 42 секунды, что почти в три раза быстрее, чем трудились роботы в хаотическом режиме. Но при этом весовой результат составил 27 грамм, т.е. 54 %, сопоставимые с соперниками, чистящими пол заметно дольше.
Для того, чтобы сформировать более полную картину о возможностях Iclebo Arte запустим его в тех же условиях, что и остальных участников — в хаотическом режиме на 5 мин.

Результат уборки Iclebo Arte в «хаосе» выглядит очень убедительно.
Картина с результатом уборки выглядит впечатляюще. Мало того, что убрано все с основной площади, так еще робот очень тщательно отработал периметр и углы, в которых осталось совсем немного грязи — сказались очень мягкие боковые щетки, которые плотно прилегают к поверхности пола. Это при том, что пылесос практически бесшумен и у него нет такого мощного потока воздуха на выходе, как у других участников. Да и конструкция не хвастается «мегапрогрессивом»: всего одна щетка, нет турбины и контейнер без каких-либо конструктивных особенностей. Взвешиваем результат трудов.
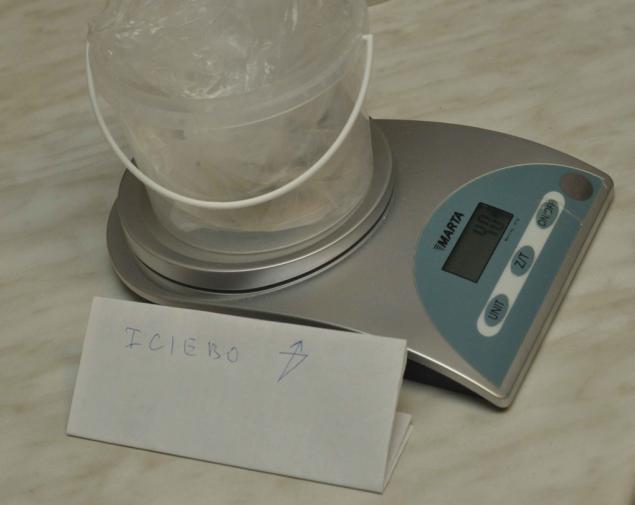

Iclebo Arte после уборки. Хороша видна относительная простота конструкции, которая не помещала показать достойный результат по качеству уборки.
И он составляет целых 40 грамм, т.е. 80 %. Весьма интересный итог, который порождает закономерную парадигму: робот-пылесос, прошедший несколько раз по одному и тому же месту, вычистит его заметно лучше, чем если сделает по нему один проход. Но это работает для маленькой площади, а на большой территории, особенно если она представляет собой несколько отдельных комнат, аппарат рискует везде так и не побывать до того, как закончится заряд аккумулятора, и, как следствие, оставить неубранными отдельные области. Проверим это в нашем следующем эксперименте.
В завершение описания результатов данного теста отметим общую особенность работы всех участников. Как и предполагалось, наиболее сложной для автоматических уборщиков стала задача сбора очень мелкой пыли. Она попадает в микронеровности поверхности пола и ее оттуда очень трудно вымести щеткой. Дополнительно препятствуют выметанию электростатические силы, притягивающие частицы к полу. Поэтому если провести рукой по полу после уборки, можно легко обнаружить, что поверхность не идеально чистая.

После простой уборки пылесос оставляет неубранными микрочастицы, которые, впрочем, если вы вручную подметете пол веником, тоже останутся там, где были.
Можно ли добиться от роботов лучшего качества уборки? Оказывается, можно. Достаточно установить на пылесос насадку с салфеткой из микрофибры, смоченной водой перед рабочим циклом, если она, конечно же, предусмотрена конструкцией и комплектом поставки. Благодаря волокнам наноразмера такая салфетка соберет на себя все то, что не смогла убрать щетка пылесоса и засосать вакуумный насос.

Насадка с влажной тряпочкой из микрофибры серьезно улучшает собираемость мелкодисперсной пыли.

И после такой расширенной уборки, следов а полу уже не остается.
Так что если хотите добиться максимальной чистоты, сопоставимой с тем же результатом, что после влажной уборки — обязательно используйте салфетки, если они предусмотрены конструкцией робота-пылесоса.
ТЕСТ №2. РОБОТ УБИРАЕТ ВСЮ КВАРТИРУ
Данный тест не столь интересен с визуальной точки зрения, однако позволяет сразу сделать вывод относительно навигационного и алгоритмического совершенства робота, серьезно оказывающего влияние в конечном итоге на интегральный (суммарный) показатель эффективности работы робота по уборке помещения.
Кстати, об интегральном показателе. Если принять допущение, что пыль распределена по квартире равномерно (а это в большинстве помещений так, если речь идет об обычной бытовой пыли, а не о специфических локальных или строительных загрязнениях), то суммарную эффективность уборки роботом можно оценить, перемножив процент собираемой пыли на процент покрытой площади. Т.е. получается, что зная сколько пылесос принципиально собирает из имеющейся на полу пыли в процентном выражении и располагая данными какую долевую часть площади он очищает без пропуска, помножив одно на другое, получим процент собранной пыли от всей имеющейся в квартире.
Итак, мы разбросали 30 небольших кусочков бумаги (назовем их маркерами) по трем комнатам и предложили каждому пылесосу по очереди их собрать. Для чистоты эксперимента мы запустили всех участников на тест дважды и усреднили результаты по итогам двух заездов. Вот что получилось.
1. Clever&Clean V-series — 15 маркеров из 30 — 50 %;
2. Iclebo Arte (последовательный режим) — 28 маркеров из 30 — 93,3 %;
3. Iclebo Arte (хаотичный режим) — 25 маркеров из 30 — 83,3 %;
4. e.ziclean TORNADO — 21 маркер из 30 — 70 %.
Итого получаем следующее распределение результатов по интегральному показателю (максимально возможный показатель — единица).
1. Iclebo Arte (последовательный режим) — 0,504 или 50,4 % пыли, имеющейся в квартире на момент уборки;
2. Iclebo Arte (хаотичный режим) — 0,666 или 66,6 % пыли, имеющейся в квартире на момент уборки;
3. e.ziclean TORNADO — 0,448 или 44,8% пыли, имеющейся в квартире на момент уборки;
4. Clever&Clean V-series - 0,28 или 28 % пыли, имеющейся в квартире на момент уборки.
На первый взгляд не густо. Однако если всеобъемлюще посмотреть на эту ситуацию, то все окажется не так плохо и даже хорошо. Ведь, во-первых — это убирается робот и вы практически не тратите своего личного времени на данную процедуру. А во-вторых — благодаря тому, что уборку делают за вас, ее можно и нужно делать ежедневно. Большинство моделей автоматических пылесосов (за исключением самых простых и дешевых) поддерживают выполнение уборки по расписанию и вполне могут это делать даже тогда, когда вас нет дома. В случае, если вы дома — робот не будет требовать запуска и сам начнет убираться. При ежедневных уборках вновь появляющаяся пыль не успеет втоптаться в пол и практически сразу будет убрана пылесосом, тем самым робот серьезно уменьшит ее количество на протяжении всего периода между влажными уборками и, как результат, вы будете дышать все это время в достаточной степени чистым воздухом. Впрочем, оставим главные выводы касательно общей эффективности роботов-пылесосов до одноименного раздела нашей статьи, там же проиллюстрируем их графически, а пока переходим к очередному испытанию.
ТЕСТ №3. ПРЕОДОЛЕНИЕ БАРЬЕРОВ
Для оценки проходимости роботов мы использовали деревянные рейки разной толщины и прямоугольной формы высотой 7 мм, 14 мм, 18 мм и 20 мм. В данном исследовании хитростей и тонкостей особо нет — робот либо преодолевает барьер предложенной высоты, либо не преодолевает, поэтому не буду много писать, а просто приведу результаты испытаний.

Торнадо смог преодолеть порог высотой только 7 мм.

Clever&clean V-series тоже не смог похвастаться чем-то выдающимся — те же 7 мм.

А вот Iclebo благодаря специальному режиму преодоления препятствий (включен по умолчанию и может быть отключен принудительно) лишь немного не смог дотянуть до максимальной высоты, которую мы планировали проверить в рамках данного теста (20 мм). Уверенные 18 мм.
Говоря в двух словах, роботы воспринимают препятствие по разному. Возникает ощущение, что у Clever&clean и Tornado датчики настроены на высокую чувствительность и при любой внештатной ситуации, к которой можно вполне отнести и барьер выше 7 мм, «пугаются» — начинают дергаться туда-сюда, поворачиваться и в итоге уезжают обратно. Iclebo же в этом отношении гораздо более «бесстрашен» и очень агрессивно атакует попадающие под колесо препятствия, когда активирован фирменный режим. Хотя 7 мм — это высота, которую редко превышают подавляющее большинство накладок, скрывающих щель между переходом от полового покрытия одной комнаты к покрытию комнаты другой. Поэтому продемонстрированных возможностей участников нашего теста должно хватить для уверенного передвижения между комнатами. Ну а в случае с Iclebo вообще ни о каких порожках можно не волноваться.
ТЕСТ №4. УБОРКА, ВИД ИЗНУТРИ
Самую зрелищную часть нашей испытательной программы мы, разумеется, приберегли напоследок. Все делаем как и в тесте №1 за той лишь разницей, что действо происходит на стекле.

Загрязнения те же, пылесосы тоже. А вот убираются они на стекле.

Фото плохо передают динамику. А вот на видео хорошо видно как грязь бесследно исчезает во чреве машины. Всасывание идет весьма активное.

Работа Icleabo на стекле смотрится еще эффектней, чем на полу. Резиновый скребок из мягкой резины не оставляет пыли шанса. Грязь пропадает внутри также активно как у Торнадо.

А вот V-серия от Clever&clean на стекле обнажила причину сюрприза из первого теста.
Про корейский и французский пылесосы добавить решительного нечего, они визуально подтвердили качество своей работы — эффективно подметают и всасывают. А на V-серии от Clever&clean стоит остановиться поподробней.
Модель пылесоса с V-образным расположением щеток на стекле повторила тот же трюк, что и на полу. Пройдя по всей площади стекла, робот пускай и с некоторым трудом, но сумел всосать мелкие частицы, а крупные, такие как кусочки бумаги остались под ним и таскались вплоть до окончания уборки. Попробуем разбораться почему так происходит.
На наш взгляд самая главная проблема — это небольшой конструктивный просчет, который возник в результате нестандартного расположения основных щеток и контейнера для сбора пыли, состоящего из двух отсеков (причем воздух от насоса протягивается только через один). Из-за острого угла между скребками по центру образуется зазор прямо по ходу движения движения робота, в который и попадают крупные загрязнения. Способствуют этому и очень качественные боковые щетки, заметающие буквально все как раз в эту центральную часть, что попадается на пути пылесосу. А дальше этому мусору деваться некуда, поскольку его блокирует третий поперечный скребок, а в узкую щель, находящуюся перед ним мусор просочиться не в состоянии.

Несмотря на то, что насос интенсивно протягивает воздух через поперечную щель, туда способна попасть только самая мелкая пыль, а относительно крупные загрязнения, такие как кусочки бумаги, не пролезают.

Контейнер для сбора пыли состоит из двух частей, как у Торнадо. Воздух прокачивается только через один из отсеков и подразумевается, что туда будут «закачиваться» мелкие и легкие загрязнения, а крупные будут уделом щеток, сбрасывающих их в другой отсек, но эта схема работает не всегда.
B итоге происходит то, что происходит. Если на пути робота попадет попадет что-то массивнее пыли или крошек, то оно вполне может выступить препятствием затрудняющим всасывание мелкой пыли в щель пылесборника. В то же время надо признать, что уменьшение проходного сечения, через которое происходит всасывание воздуха, способствует ускорению движения этого воздуха, что в конечном итоге лучше увлекает легкие мусорные частицы в контейнер. Поэтому пылесос показал очень схожий результат с роботом TORNADO.
Кстати, у компании Clever&clean в модельной линейке присутствует еще пылесос Z-серии с традиционной компоновкой и поперечным расположением основной щетки. В следующем нашем тестировании роботов-пылесосов мы обязательно проверим насколько он будет хорошо убираться.
ОБЩИЕ ВЫВОДЫ
Ну что ж, подведем итоги на основе проделанных исследований.
Вначале сделаем общий вывод по эффективности и целесообразности использования автоматических пылесосов как одного из явлений бытовой техники. Для оценки вклада пылесоса в чистоту квартиры, в которой он будет трудиться, нам потребуется немного математики, а именно опишем математическую модель «грязеоборота» в помещении и отобразим ее в графическом виде.
При составлении модели необходимо принять исходные условия. Возьмем их максимально приближенные к реальным и самым распространенным.
1. Как правило, мы наводим порядок на выходных и, скорее всего, большинство читателей в своих квартирах и домах убираются каждые выходные, поэтому период между уборками составляет 7 дней.
2. Для простоты визуализации примем, что каждый день в процессе обычного проживания в естественных условиях у нас падает на пол новые 10 грамм пыли и она распространяется по всей площади помещения равномерно. Подчеркну, что при построении общих закономерностей важно не конкретное количество пыли (оно у всех разное), а относительные соотношения, показывающие эффект от применения робота, поэтому условно возьмем ежедневный прирост пыли в 10 г.
3. Пылесос будет работать ежедневно на протяжении всей недели. При этом предположим, что перед его первым запуском пол тщательно очищен и пыли на нем нет.
Рассмотрим принцип составления модели на примере главного героя нашего теста — TORNADO. Впоследствии диаграммы построим для всех участников тестирования. Исходя из принятых условий будем иметь, что в первый день появилось 10 г. пыли и робот-пылесос собрал ее в пределах своего интегрального показателя эффективности (44,8%), количество же оставшейся на полу пыли можно определить по формуле:
Gд1 = (1-Киэф) х Gежедневн = (1-0,448) х 10 = 5,52 г.
Соответственно на следующий день к оставшейся после уборки пыли вчерашнего дня добавится ежедневный объем и все это снова будет убирать робот в рамках своих возможностей. Итого после второго дня пыль останется в следующем количестве:
Gд2 = (1-Киэф) х (Gд1 + Gежедневн) = (1-0,448) х (5,52 + 10) = 8,57 г.
Для остальных дней недели:
Gд3= (1-Киэф) х (Gд2 + Gежедневн) = (1-0,448) х (8,57 + 10) = 10,25 г.;
Gд4 = (1-Киэф) х (Gд3 + Gежедневн) = (1-0,448) х (10,25 + 10) = 11,18 г.;
Gд5 = (1-Киэф) х (Gд4 + Gежедневн) = (1-0,448) х (11,18 + 10) = 11,69 г.;
Gд6 = (1-Киэф) х (Gд5 + Gежедневн) = (1-0,448) х (11,69 + 10) = 11,97 г.;
Gд7 = (1-Киэф) х (Gд6 + Gежедневн) = (1-0,448) х ( 11,97 + 10) = 12,13 г.;
Для других участников теста расклад получается такой.
Iclebo работая в последовательном режиме всю неделю оставит после себя 9,8 г. загрязнений, в хаотичном режиме уже около 5 г., а Clever&clean V-series не уберет за неделю 23,13 г.
Получается очень любопытный результат. Если робот-пылесос не использовать, то, разумеется, при ежедневном добавлении 10 г. в помещении будет находиться к концу недели 70 г. пыли. Если каждый день использовать робот-пылесос TORNADO, то на полу через 7 дней окажется только 12,13 г. пыли, что ровно в 5,8 раза меньше! А если в процентах, то за неделю робот соберет почти 83 % процента всей появившейся пыли. А показавший лучший результат пылесос Iclebo так и вообще за семь дней успеет поглотить без малого 93% всего, что осядет на полу в виде пыли, т.е. ее будет в 14 раз меньше (!).
Есть повод задуматься. Ведь перемещаясь по квартире, мы ногами поднимаем пыль в воздух и впоследствии всем этим дышим на протяжении тех дней, когда уборка в помещениях не проводится. А вдыхать ее не очень-то полезно. Чтобы это понять, достаточно набрать в любой поисковой системе интернета запрос «состав бытовой пыли» и почитать материалы исследований ученых по этой теме.
Для наглядности по полученным результатам построим общую диаграмму, учитывающую результаты всех участников теста.
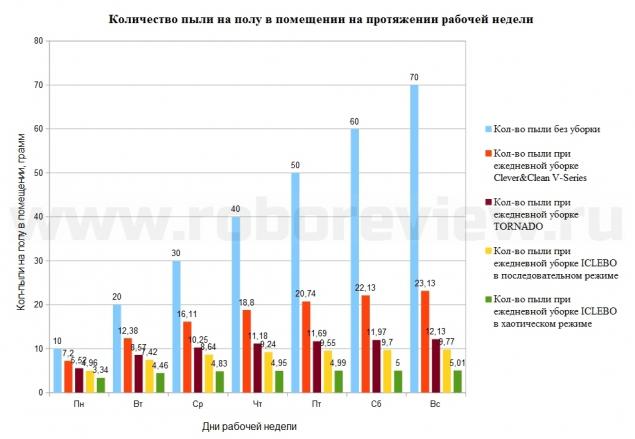
Не могу не сделать маленькую ремарку относительно результатов корейского робота в последовательном и хаотическом режимах. По результатам наших исследований получилось, что хаотический режим с точки зрения чистоты оказался лучше, чем последовательный. Однако это справедливо для наших конкретных условий: четыре помещения площадью 25, 10, 13 и 15 кв. м. Хаотичный режим характеризуется тем, что подчинен теории вероятности. Сложность управляющих алгоритмов в некоторой степени нивелирует риски где-то не побывать, однако вероятность всегда есть. По ходу теста пылесос не заехал в самую маленькую комнату (10 кв. м.), что и дало конечный результат покрытия 83 %. В остальных комнатах он все маркеры собрал. Но в каком-то очередном цикле уборки он мог не заехать и в комнату большую — тогда результат был бы хуже. Так что все зависит от площади помещений. Если площади большие и присутствуют несколько комнат, то хаотичный режим может оказаться заметно менее эффективным, чем последовательный, который гарантирует гораздо более уверенное ориентирование пылесоса, способствующее более полному «покрытию» при уборке.
Теперь, обладая данными, полученными в процессе нашего исследования, можно объективно ответить на вопросы, поставленные в начале данной статьи.
Робот-пылесос — это «электровеник» или настоящий пылесос?
На основе анализа конструкций можно заключить, что некоторые черты электровеника в нем, конечно же, есть, но тем не менее эти роботы пылесосят и собирают пыль очень хорошо. В первую очередь важен конечный результат, а он при определенных условиях вполне может быть сопоставим с результатом, достигаемым с помощью обычного мощного пылесоса.
Он убирается везде или оставляет большие области неубранными?
Ответ на данный вопрос хорошо иллюстрирует наш тест №2. Тут многое зависит от системы навигации робота. Чем она совершеннее, тем меньшая площадь останется неубранной.
Насколько хорошо он собирает пыль там, где проехал?
Опять же зависит от конкретной модели пылесоса. Какие-то устройства собирают пыль очень хорошо, а какие-то хуже. Но если он убирается каждый день, то даже не абсолютная способность собрать все ненужное с пола не мешает собирать приблизительно от 70 до 95 % всей появляющейся пыли, что достаточно много и очень хорошо чувствуется. Дышать, действительно, становится легче.
Какова степень его разумности для выполнения интеллектуальной уборки?
Разумность робота определяется уровнем развития технологий технического зрения и вычислительных систем, а также сложностью загруженного в робота программного обеспечения. Модели подешевле обычно не обладают изысканным интеллектом, а те, что подороже — вполне могут порадовать признаками настоящего разума.
Действительно ли автоматизированный сборщик пыли способен освободить владельца квартиры или дома от уборки полов или хотя бы предоставить возможность убираться реже?
Как видно из наших диаграмм, полностью освободить от уборки робот на текущий момент не способен. Некоторое количество пыли будет по-прежнему оставаться, которое желательно убирать во время влажной уборки. К тому же наличие стульев и другой мебели могут затруднить роботу доступ к некоторым участкам пола и его уборка потребует вмешательства человека. Однако цифры, которые мы получили, позволяют делать уборку в несколько раз реже — например раз в месяц вместо раза в неделю. Да и тот факт, что пыли на полу и в воздухе станет на 70-90% меньше, однозначно положительно скажется на вашем здоровье и самочувствии, при том, что времени на достижение такого результат вы практически не будете тратить.
ВЫВОДЫ ЧАСТНЫЕ
Надеемся, что после прочтения общих выводов у вас уже развеялись сомнения относительно пользы автоматического уборщика и необходимости иметь его в каждом домохозяйстве. Однако остается вопрос «какой же купить»?
Если выбирать из наших участников теста, то самым бесспорным выбором является модель Iclebo Arte от корейского производителя. Вторым в рекомендациях, как можно догадаться, идет французский ТОРНАДО. А замыкает тройку робот Clever&clean V-series с самыми скромными показателями эффективности уборки. Однако немаловажным моментом остается стоимость устройства в магазинах. И если посчитать удельную стоимость единицы эффективности V-series, то окажется, что он выглядит весьма разумной покупкой. Он не настолько хуже, насколько дешевле стоит, — разница в цене по сравнению с Arte почти двукратная.
Вообще выбор любого высокотехнологичного устройства всегда непростой и определен множеством факторов. Поэтому приведу ряд соображений относительно эффективности работы устройства в зависимости от конструктивных особенностей. Это по сути результаты той самой битвы концепций, озвученной в начале статьи.
- Наилучшей эффективностью обладают устройства, у которых основная щетка расположена перпендикулярно линии направления движения. Любые эксперименты с угловым расположением щеток приводят к снижению количества собираемой пыли.
- Желательно, чтобы воздух от насоса, обеспечивающего всасывание пыли проходил через основную щетку — это способствует лучшей собираемости пыли.
- Дополнительная основная щетка не всегда дает преимущество в части количества собираемой пыли, однако заметно усложняет конструкцию.
- Продвинутая система навигации на основе видеокамеры или лазерного радара, позволяющие минимизировать пропуски площадей при уборке, значительно повышает интегральную эффективность работы робота и является предпочтительной, однако приводит к заметному удорожанию автоматического уборщика.
- Стоит также обращать внимание на аккумуляторную батарею, установленную в устройстве изготовителем робота. Робот для достижения максимальных результатов должен убираться каждый день, а в этом случае Ni-Mh аккумулятор достаточно быстро выработает свой ресурс и потребует замены, в то время как накопитель электроэнергии, созданный на основе технологии Li-ion, будет служить в несколько раз дольше.
- Предпочтительны те модели, у которых допускается программирование расписания уборки. Данная функция максимально упрощает диалог владельца с устройством и без дополнительных усилий обеспечивает ежедневность своей роботы, что гарантирует раскрытие всего потенциала робота-пылесоса по очистке вверенных ему площадей.
Источник: geektimes.ru/company/robohunter/blog/267930/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.





































Новая серия офисной мебели «Sample» от компании «МебельСтиль»
Норвегія визнана найкращою країною для життя.