Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
1456
0.3
2015-01-10
Международная выставка роботов (69 фотографий)
В первой половине ноября в Токио проходила Международная выставка роботов, на которой были представлены перспективные разработки и современные образцы робототехники из промышленной, бытовой и научной сферы. Так вышло, что интерес к роботам у меня сохраняется уже несколько лет – в Новосибирске я собирал роботов и писал для них программы. Именно поэтому было интересно посмотреть не только на привычные для меня образцы и типы, но и на то, чего я никогда не видел – промышленных роботов и сложных андройдов.

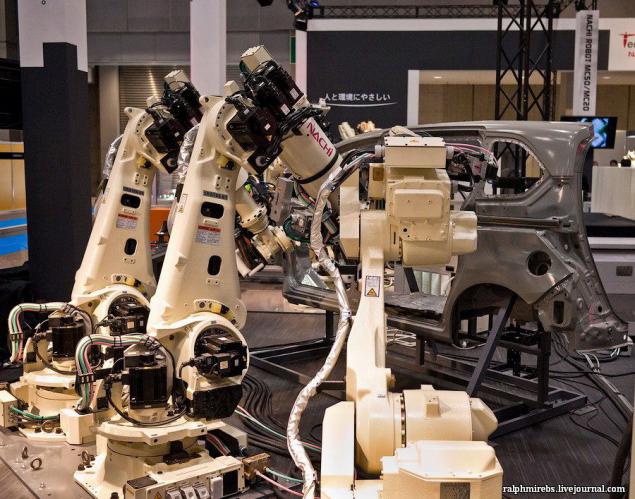
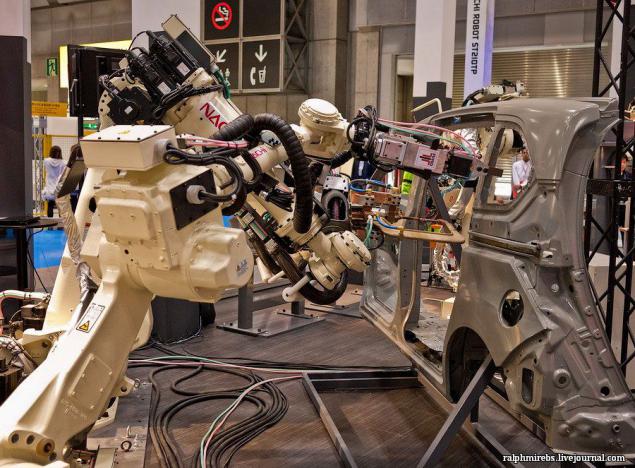
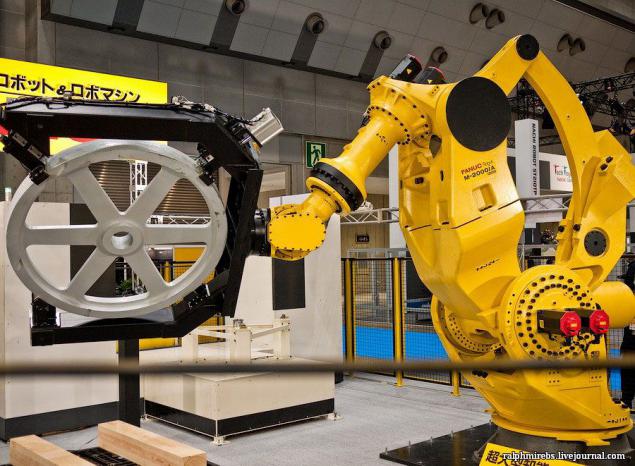
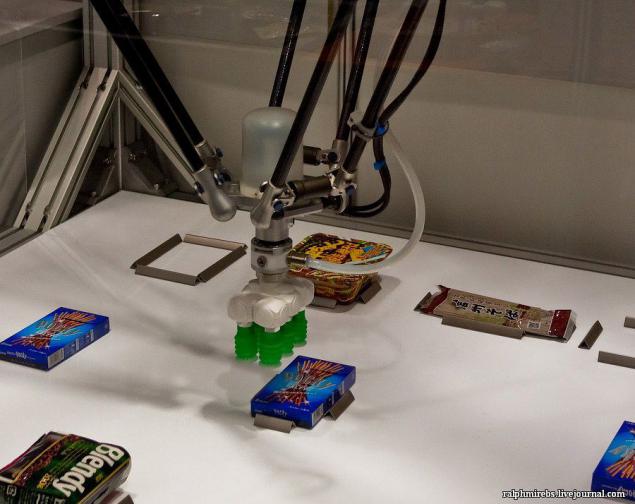
Начнём с промышленных роботов, производимых множеством различных фирм, таких как Kawasaki, Toshiba, FAUNC, Nachi и др. Этот тип роботов считается одним из самых старых и их назначение производить различные рутинные операции по переносу предметов с места не место, сварке и резке деталей, окраске, сортировке и сборке. Внешне такие роботы обычно выглядят как механическая рука, вращающаяся в различных направлениях с высокой скоростью. На конце руки закреплён «рабочий» орган, с помощью которого робот захватывает предметы или производит нужные операции. В качестве «глаз» у роботы выступает видеокамера, определяющая местоположение предметов, ориентацию их в пространстве, цвет и форму.





Другой большой класс роботов это роботы-помощники. Созданные для выполнения работ, они могут выглядеть и как коробки с колёсиками и как люди — все зависит от целей их создания. Например, это могут быть роботы-пылесосы и роботы-тележки. Например эти два робота, от компании Daiwa House могут самостоятельно перемещаться по офису, собирая пыль с полу или перевозя грузы между различными точками.


Или не пылесос а адская роботизированная косилка на гусеничном ходу, для скашивая всего, что встретится у неё на пути.

Другие роботы ориентированы для помощи по дому и могут управляться удалённо. Робот фирмы Yaskawa позиционируется как помощник одиноким инвалидам и пожилым людям. Управляемый человеком из другого города он может собирать предметы, переносить их, передавать звук и видео.

Робот-мойшик стёкол. Две части этого робота находятся по разные стороны стекла, а удерживает их магнитное притяжение.

Робот-информационное табло. Согласитесь, такая форма рекламы куда более привлекает, чем одиноко висящий на стене монитор.

Робот-пациент зубного кабинета. Служит для обучения молодых дантистов, управляется голосом и, в ответ на команды, открывает рот, вращает головой, голосом сообщает о самочувствии…

Робот-тренажёр верховой езды. Не уверен, насколько это эффективно, по сравнению с живой лошадью, однако выглядит одновременно и забавно и внушительно.


Роботов-андройдов можно смело выделять в отдельный класс, несмотря на то, что их назначение может быть самым различным, начиная от научных исследований и заканчивая развлекательными функциями. Робот-андройд должен внешним видом, способом передвижения и взятия предметов, походить на человека. Вот несколько образцов и начнём с андройда-девушки по имени HRP-4C от научной группы AIST. Девушка обладает развитой мимикой лица, может танцевать и петь.

Вот видео с одним её выступлением.

Собственно говоря, на видео отчётливо видно слабое место всех современных андройдов, а именно ноги и походка. При все развитой пластике рук, роботы пока не умеют быстро и резво передвигаться.
Другие, представленные на выставке андройды это HRP-2 и HRP-4 от Kawada Group. Первый робот этой серии увидел свет ещё в 1997 году. Роботы умеют ходить, выполнять гимнастические движения, самостоятельно подниматься из лежачего положения, отслеживать заданную цель.

Видео с демонстрацией базовых возможностей HRP-4.

Робот проекта RoboThespian явно недоумевает, почему человек решил пообедать прямо за стойкой выставочного стенда, на глазах у всей публики. Ведь работа на публику это его занятие, постольку поскольку он робот-актёр. Мимика, развитые движения руками, поставленный голос — всё это его отличает других собратьев.

Весёлое видео посвящённое этому весёлому андройду.
А вот кошечка Kokoro I-Fairy — к андройдам уже не относится, ибо ходить она не умеет. Это робот-рассказчик. Зато она всегда сидит на музыкальной системе, умеет распознавать лица, речь и говорить различными голосами.

Кстати, у всех андройдов имеется пульт управления, посредством которого, человек может в любой момент взять управление на себя. Так-же пульты, есть и у всех промышленных роботов. На всех пультах имеется большая красная кнопка экстренного выключения, именно та, которую так долго искал Ури в фильме «Приключения Электроника».


Никото — робот, совсем недавно, разработанный в Японском технологическом университете. Что умеет хбз :))

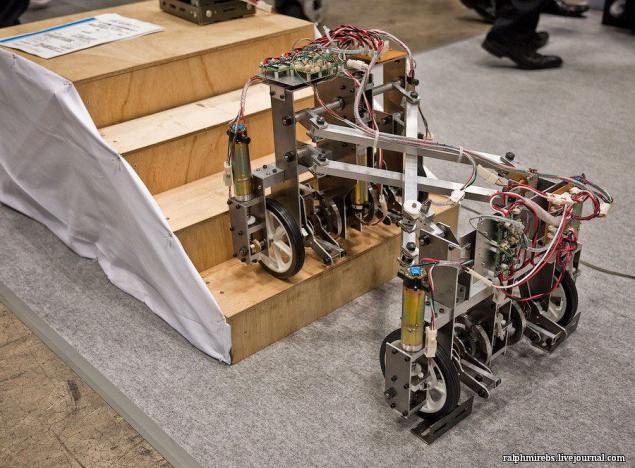
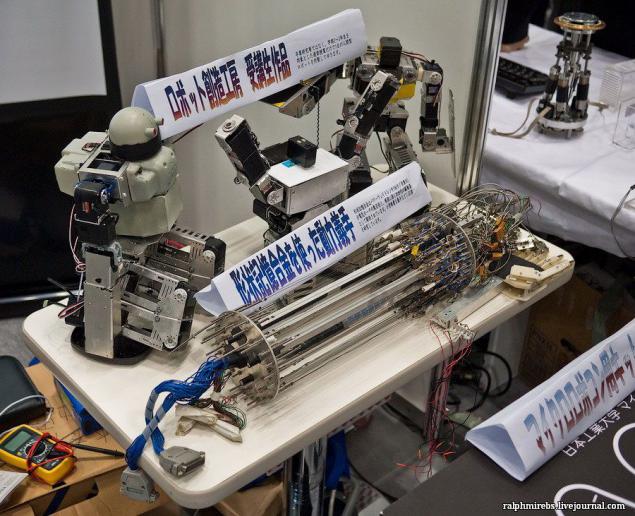
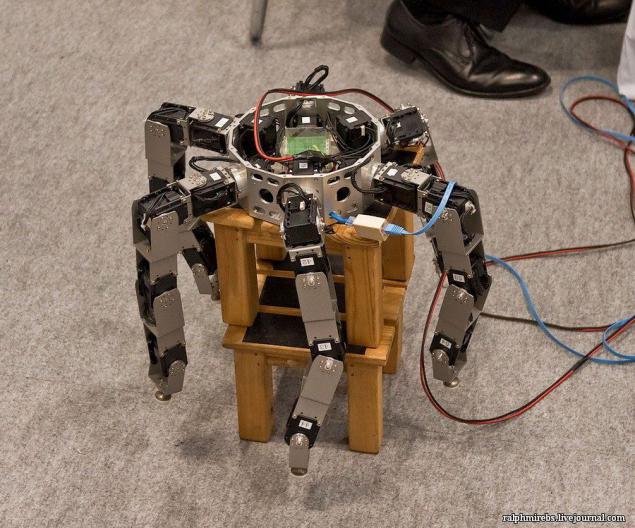
Вообще, множество университеты представили очень много своих студенческих разработок. Именно студенческих, а не от научных групп, то есть эти роботы сделаны вручную на занятиях из подручных запчастей. Все многообразие очень напоминает страницы журнала Моделист-конструктор выпусков эдак 70х годов. Электронная начинка у них, конечно, полностью современная и, скорее всего, стандартная, а отличаются друг от дружки они способами передвижения и, разумеется, внешним видом. Ниже с десяток фотографий ездящих, ползающих и шагающих живых механизмов.






Ещё одна студенческая разработка — прототип будущих экзоскелетов для увеличения возможностей организма и повышения качества жизни инвалидов. По сути это усилители мускул. Например, я держу 50 килограмм риса и не чувствую усталости и тяжелого веса, потому что надетый экзоскелет поддерживает руки, спину и не дает им опускаться и сгибаться под тяжестью груза. А вообще, данная модель позволяет носить на руках до 150 килограмм.


Серийные образцы подобных систем могут уже сегодня помочь как при поднятии тяжестей, так и при старческой слабости рук и ног. Система, отследив попытку сгибания ноги, начнет помогать это делать, таким образом «ведя» конечность, предотвращая внезапный срыв под тяжестью тела.




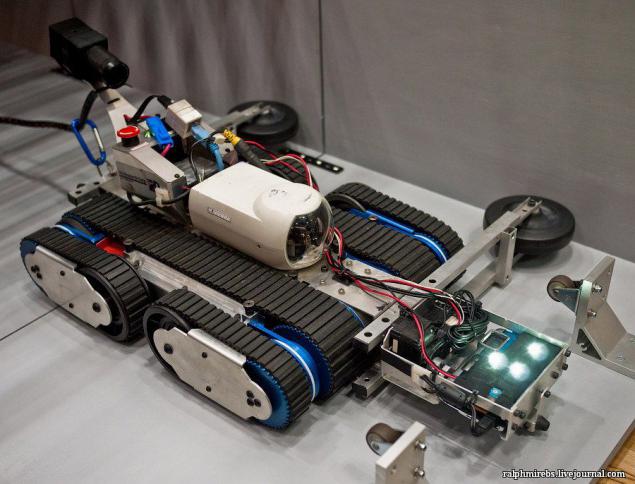
Роботы наблюдатели, спасатели и исследователи не обязательно должны обладать интеллектом или работать про программе как андройды. От них требуется совсем другое, а именно умение передвигаться по различной местности например, среди обломков, взбираться по лестницам и видеть вокруг себя. Некоторые их них созданы для перемещения под водой.






Некоторым компаниям, если они хотят успешно продавать свою продукцию в России нужно незамедлительно подумать о смене названия. Данная фирма не производит своих роботов, но занимается модификациями и доработками различных других моделей для необычного применения. Например, Hiro от Kawada стал барменом, а Nao от французской компании Aldebaran Robotics научилась качаться на качелях.



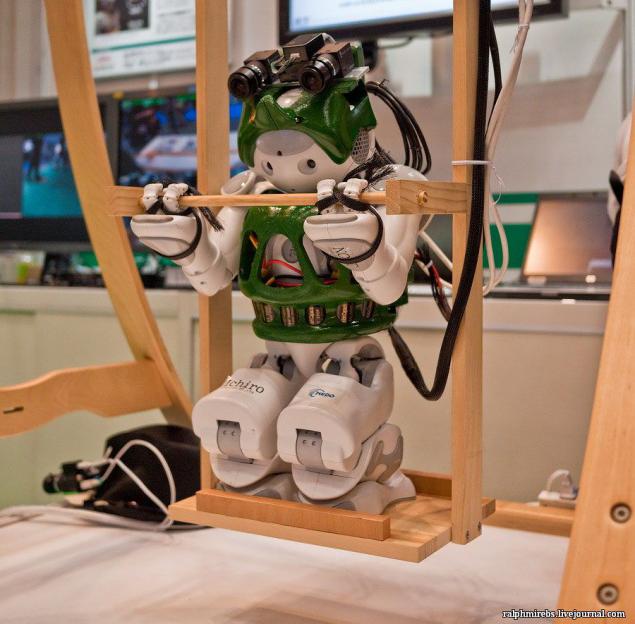
Вообще, Nao весьма интересная и перспективная платформа в классе бытовых и образовательных роботов. Открытый код, высокая подвижность базовой модели, изначально встроенная система распознавания объектов, звуковая система и не маленькие размеры сулят ей большое будущее на фоне конкурентов. Единственный недостаток, присущий практически всем современным системам — не реалистичная ходьба.

Посмотрите презентационный видео ролик про Nao и она вам понравится.
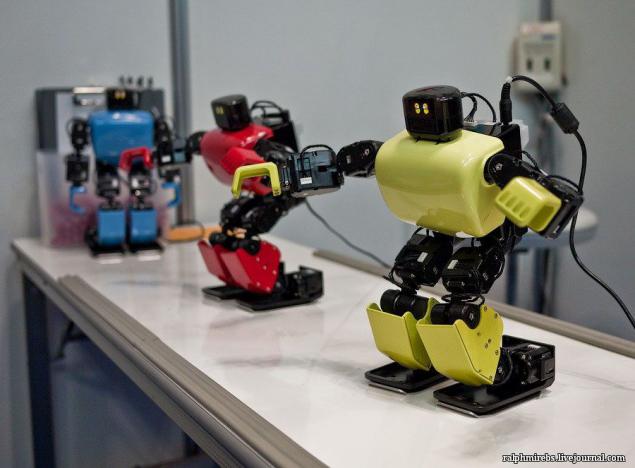
А вот это один из моих роботов, оставшихся в Новосибирске. Особенность данной платформы, называемой RobpBuilder в том, что детали робота можно соединять разными способами и получить не только человека, но и собаку, паука, кран и много другое. На выставке он был представлен под другой торговой маркой.
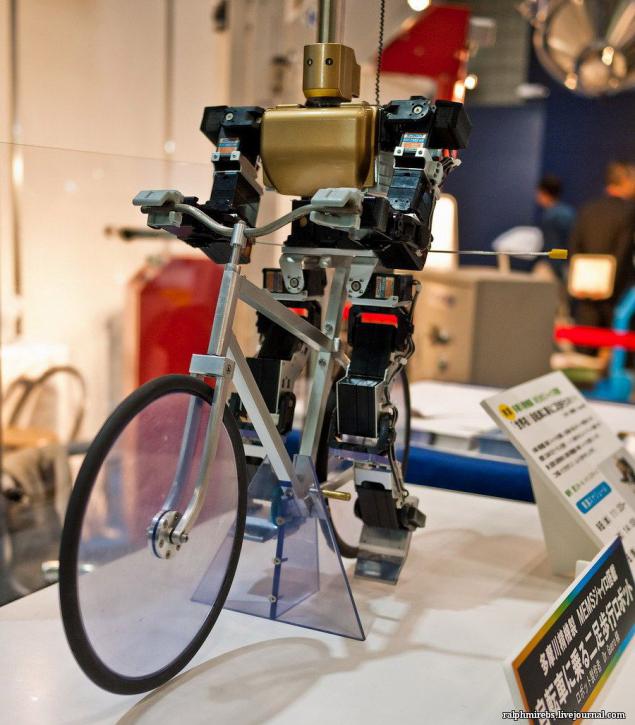
Кстати, таких маленьких роботов тоже можно научить выполнять удивительные вещи. Например, стандартный набор для сборки робота от Kondo, после сборки научили кататься на велосипеде.
Видео про то, как робот Kondo KHR-3? катается на велосипеде.
Терапевтические роботы, созданные для общения с пожилыми людьми и детьми. Издают звуки, двигают лапами и хвостами, реагируют на прикосновения, а некоторые умеют распознавать лица и речь.



Видео про? социального робота-медведя Тедди.
Помимо роботов, на выставке были представлены разнообразные комплектующие для них и программируемые системы, такие как трёхмерные принтеры, создающие объекты из пластика. Самый большой имел размеры с холодильник. На фотографиях представлен внешний вид, процесс создания изделия и готовые образцы.



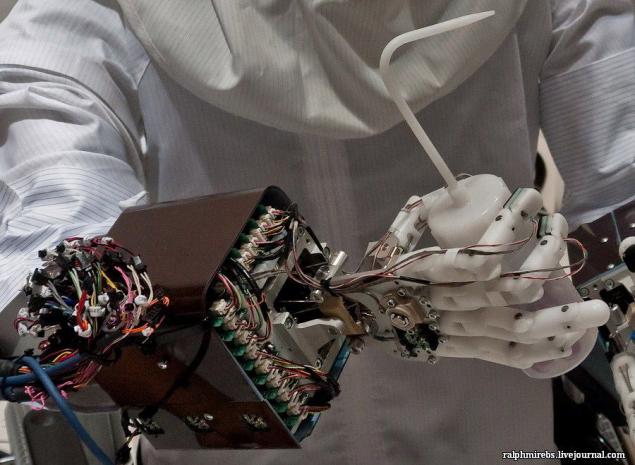
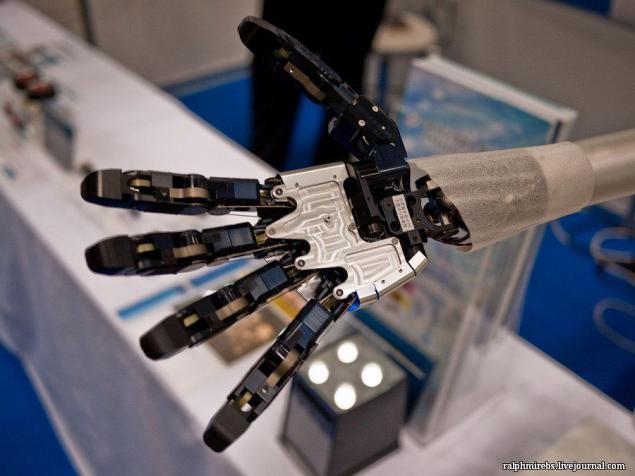
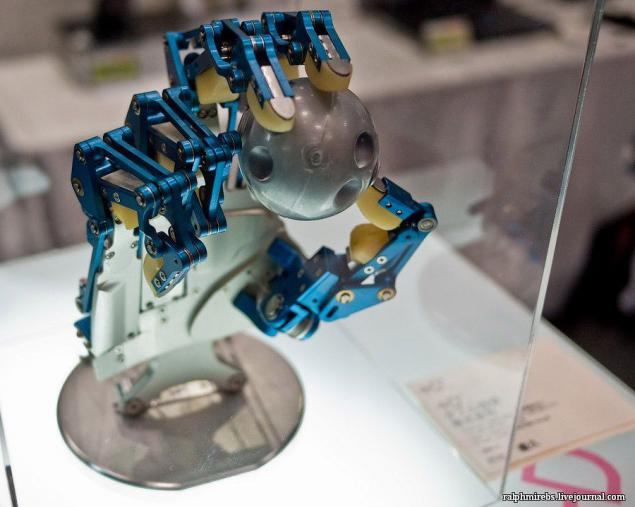
И напоследок несколько фотографий различных манипуляторов, по-простому говоря рук роботов.



Источник

Начнём с промышленных роботов, производимых множеством различных фирм, таких как Kawasaki, Toshiba, FAUNC, Nachi и др. Этот тип роботов считается одним из самых старых и их назначение производить различные рутинные операции по переносу предметов с места не место, сварке и резке деталей, окраске, сортировке и сборке. Внешне такие роботы обычно выглядят как механическая рука, вращающаяся в различных направлениях с высокой скоростью. На конце руки закреплён «рабочий» орган, с помощью которого робот захватывает предметы или производит нужные операции. В качестве «глаз» у роботы выступает видеокамера, определяющая местоположение предметов, ориентацию их в пространстве, цвет и форму.








Другой большой класс роботов это роботы-помощники. Созданные для выполнения работ, они могут выглядеть и как коробки с колёсиками и как люди — все зависит от целей их создания. Например, это могут быть роботы-пылесосы и роботы-тележки. Например эти два робота, от компании Daiwa House могут самостоятельно перемещаться по офису, собирая пыль с полу или перевозя грузы между различными точками.


Или не пылесос а адская роботизированная косилка на гусеничном ходу, для скашивая всего, что встретится у неё на пути.

Другие роботы ориентированы для помощи по дому и могут управляться удалённо. Робот фирмы Yaskawa позиционируется как помощник одиноким инвалидам и пожилым людям. Управляемый человеком из другого города он может собирать предметы, переносить их, передавать звук и видео.

Робот-мойшик стёкол. Две части этого робота находятся по разные стороны стекла, а удерживает их магнитное притяжение.

Робот-информационное табло. Согласитесь, такая форма рекламы куда более привлекает, чем одиноко висящий на стене монитор.

Робот-пациент зубного кабинета. Служит для обучения молодых дантистов, управляется голосом и, в ответ на команды, открывает рот, вращает головой, голосом сообщает о самочувствии…

Робот-тренажёр верховой езды. Не уверен, насколько это эффективно, по сравнению с живой лошадью, однако выглядит одновременно и забавно и внушительно.


Роботов-андройдов можно смело выделять в отдельный класс, несмотря на то, что их назначение может быть самым различным, начиная от научных исследований и заканчивая развлекательными функциями. Робот-андройд должен внешним видом, способом передвижения и взятия предметов, походить на человека. Вот несколько образцов и начнём с андройда-девушки по имени HRP-4C от научной группы AIST. Девушка обладает развитой мимикой лица, может танцевать и петь.

Вот видео с одним её выступлением.

Собственно говоря, на видео отчётливо видно слабое место всех современных андройдов, а именно ноги и походка. При все развитой пластике рук, роботы пока не умеют быстро и резво передвигаться.
Другие, представленные на выставке андройды это HRP-2 и HRP-4 от Kawada Group. Первый робот этой серии увидел свет ещё в 1997 году. Роботы умеют ходить, выполнять гимнастические движения, самостоятельно подниматься из лежачего положения, отслеживать заданную цель.

Видео с демонстрацией базовых возможностей HRP-4.

Робот проекта RoboThespian явно недоумевает, почему человек решил пообедать прямо за стойкой выставочного стенда, на глазах у всей публики. Ведь работа на публику это его занятие, постольку поскольку он робот-актёр. Мимика, развитые движения руками, поставленный голос — всё это его отличает других собратьев.

Весёлое видео посвящённое этому весёлому андройду.
А вот кошечка Kokoro I-Fairy — к андройдам уже не относится, ибо ходить она не умеет. Это робот-рассказчик. Зато она всегда сидит на музыкальной системе, умеет распознавать лица, речь и говорить различными голосами.

Кстати, у всех андройдов имеется пульт управления, посредством которого, человек может в любой момент взять управление на себя. Так-же пульты, есть и у всех промышленных роботов. На всех пультах имеется большая красная кнопка экстренного выключения, именно та, которую так долго искал Ури в фильме «Приключения Электроника».


Никото — робот, совсем недавно, разработанный в Японском технологическом университете. Что умеет хбз :))

Вообще, множество университеты представили очень много своих студенческих разработок. Именно студенческих, а не от научных групп, то есть эти роботы сделаны вручную на занятиях из подручных запчастей. Все многообразие очень напоминает страницы журнала Моделист-конструктор выпусков эдак 70х годов. Электронная начинка у них, конечно, полностью современная и, скорее всего, стандартная, а отличаются друг от дружки они способами передвижения и, разумеется, внешним видом. Ниже с десяток фотографий ездящих, ползающих и шагающих живых механизмов.









Ещё одна студенческая разработка — прототип будущих экзоскелетов для увеличения возможностей организма и повышения качества жизни инвалидов. По сути это усилители мускул. Например, я держу 50 килограмм риса и не чувствую усталости и тяжелого веса, потому что надетый экзоскелет поддерживает руки, спину и не дает им опускаться и сгибаться под тяжестью груза. А вообще, данная модель позволяет носить на руках до 150 килограмм.


Серийные образцы подобных систем могут уже сегодня помочь как при поднятии тяжестей, так и при старческой слабости рук и ног. Система, отследив попытку сгибания ноги, начнет помогать это делать, таким образом «ведя» конечность, предотвращая внезапный срыв под тяжестью тела.




Роботы наблюдатели, спасатели и исследователи не обязательно должны обладать интеллектом или работать про программе как андройды. От них требуется совсем другое, а именно умение передвигаться по различной местности например, среди обломков, взбираться по лестницам и видеть вокруг себя. Некоторые их них созданы для перемещения под водой.







Некоторым компаниям, если они хотят успешно продавать свою продукцию в России нужно незамедлительно подумать о смене названия. Данная фирма не производит своих роботов, но занимается модификациями и доработками различных других моделей для необычного применения. Например, Hiro от Kawada стал барменом, а Nao от французской компании Aldebaran Robotics научилась качаться на качелях.




Вообще, Nao весьма интересная и перспективная платформа в классе бытовых и образовательных роботов. Открытый код, высокая подвижность базовой модели, изначально встроенная система распознавания объектов, звуковая система и не маленькие размеры сулят ей большое будущее на фоне конкурентов. Единственный недостаток, присущий практически всем современным системам — не реалистичная ходьба.

Посмотрите презентационный видео ролик про Nao и она вам понравится.
А вот это один из моих роботов, оставшихся в Новосибирске. Особенность данной платформы, называемой RobpBuilder в том, что детали робота можно соединять разными способами и получить не только человека, но и собаку, паука, кран и много другое. На выставке он был представлен под другой торговой маркой.

Кстати, таких маленьких роботов тоже можно научить выполнять удивительные вещи. Например, стандартный набор для сборки робота от Kondo, после сборки научили кататься на велосипеде.
Видео про то, как робот Kondo KHR-3? катается на велосипеде.

Терапевтические роботы, созданные для общения с пожилыми людьми и детьми. Издают звуки, двигают лапами и хвостами, реагируют на прикосновения, а некоторые умеют распознавать лица и речь.



Видео про? социального робота-медведя Тедди.
Помимо роботов, на выставке были представлены разнообразные комплектующие для них и программируемые системы, такие как трёхмерные принтеры, создающие объекты из пластика. Самый большой имел размеры с холодильник. На фотографиях представлен внешний вид, процесс создания изделия и готовые образцы.



И напоследок несколько фотографий различных манипуляторов, по-простому говоря рук роботов.







Источник
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.