2328
机器人清洁iCLEBO欧米茄的测试和审查
从韩国公司郁金机器人的新机器人吸尘器iCLEBO欧米茄拥有一些有趣的功能,是俄罗斯市场上最强大的真空吸尘器之一。虽然制造商通常不为机器人真空吸尘器声明吸力功率设置,值得一提的是,欧米茄的模型是最有效和强大的机器人吸尘器的潜力。它采用了全新无刷涡轮增压发动机,具有广泛的刀片,从而在相对较低的噪音水平(70分贝Turbo模式)提高清洗质量。无刷电机是非常可靠的,具有10年的保证。搜索结果
 结果搜索结果
优势结果
在开发新的模式,制造商已就吸收力量的重点,并尽量减少从清洗宠物的毛发和长发主刷的问题。竞争优势的第一和非常重要的欧米茄车型 - 它是真正的高吸力。为了实现这一任务,郁金机器人工程师们使用,以2倍的锂离子电池的高效率和容量的增加,新的无刷涡轮增压发动机与以前的型号艺术(现在,它的容量为4400毫安时)进行比较。机器人是能够有效地甚至收集细尘,如沙子,地毯(用较小的桩)。根据制造商的测试的结果,欧米茄提前在效率方面高达20%的直接的竞争对手。搜索结果
结果搜索结果
优势结果
在开发新的模式,制造商已就吸收力量的重点,并尽量减少从清洗宠物的毛发和长发主刷的问题。竞争优势的第一和非常重要的欧米茄车型 - 它是真正的高吸力。为了实现这一任务,郁金机器人工程师们使用,以2倍的锂离子电池的高效率和容量的增加,新的无刷涡轮增压发动机与以前的型号艺术(现在,它的容量为4400毫安时)进行比较。机器人是能够有效地甚至收集细尘,如沙子,地毯(用较小的桩)。根据制造商的测试的结果,欧米茄提前在效率方面高达20%的直接的竞争对手。搜索结果
 搜索结果
该机器人还采用使用大格式照相机,其位于主体的上部的映射空间的系统。胡佛记得他已经清洗的地方。他记得基座的位置进行充电,并返回它沿最短路径。无论是3或5间卧室的公寓,你吸尘器独自将通过所有可用的房间。如果面积够大,机器人将无法走出一个充电周期,它将返回基地,将继续负责清洁的地方太清楚。欧米茄实现了两个这样的连续周期。如果需要更彻底的清洁或一个小的区域,也可以使用MAX模式,其中第一欧米茄将通过所有的在90度的平行线的可用面积的下端展开,并会继续沿垂直于原始路径清洁同一地方,但在一个方向。这个新政权双蛇,这是不是在艺术典范。搜索结果
通过使用新的橡胶涡轮刷V6叶片吸收高功率的,质量非常高,真空吸尘器收集的头发和宠物皮屑。在主涡轮刷几乎没有毛,羊毛和线程。一切都将落入灰尘,这是非常容易清洗。真空吸尘器的底部,总是干净的,没有必要揉进去。所有你需要做的是空的集尘器和机器人是准备就绪。它的背后需要最少的维护。这一切,我们将测试和实践验证,测试和视频将在本文后面介绍。搜索结果
搜索结果
该机器人还采用使用大格式照相机,其位于主体的上部的映射空间的系统。胡佛记得他已经清洗的地方。他记得基座的位置进行充电,并返回它沿最短路径。无论是3或5间卧室的公寓,你吸尘器独自将通过所有可用的房间。如果面积够大,机器人将无法走出一个充电周期,它将返回基地,将继续负责清洁的地方太清楚。欧米茄实现了两个这样的连续周期。如果需要更彻底的清洁或一个小的区域,也可以使用MAX模式,其中第一欧米茄将通过所有的在90度的平行线的可用面积的下端展开,并会继续沿垂直于原始路径清洁同一地方,但在一个方向。这个新政权双蛇,这是不是在艺术典范。搜索结果
通过使用新的橡胶涡轮刷V6叶片吸收高功率的,质量非常高,真空吸尘器收集的头发和宠物皮屑。在主涡轮刷几乎没有毛,羊毛和线程。一切都将落入灰尘,这是非常容易清洗。真空吸尘器的底部,总是干净的,没有必要揉进去。所有你需要做的是空的集尘器和机器人是准备就绪。它的背后需要最少的维护。这一切,我们将测试和实践验证,测试和视频将在本文后面介绍。搜索结果
 搜索结果
工程师安装了各种新的传感器,诸如传感器和表面识别传感器的污染。如果路径遇到很多垃圾,欧米茄包括这增加了吸力和清洁效率涡轮吸模式。在地毯机器人还自动包括Turbo模式。滤波器存在传感器将不允许真空吸尘器没有他在灰尘存在运行。搜索结果
设计和设备结果
新的机器人真空吸尘器有两种颜色选择军团可供选择:iCLEBO欧米茄金(YCR-M07-10)和欧米茄iCLEBO怀特(YCR-M07-20)。光滑的塑料机身,但塑料材质是一个非常高的质量和它的盖子没有在表面上留下指纹。白色的机身外壳看起来像一个汽车颜色白/珍珠金属色,就是颜色有一定深度。外形被设计在设计Innodesign局。真空吸尘器的形状不再圆形,特殊的新边刷和合适的形状允许更好的清洁房间的角落。欧米茄是能够清理与效率高达边角角的96%。真空吸尘器有只有87毫米,这意味着它很容易下的床,椅子,柜子驱动,聚集在那里几个月积累灰尘超薄轮廓高度。搜索结果
搜索结果
工程师安装了各种新的传感器,诸如传感器和表面识别传感器的污染。如果路径遇到很多垃圾,欧米茄包括这增加了吸力和清洁效率涡轮吸模式。在地毯机器人还自动包括Turbo模式。滤波器存在传感器将不允许真空吸尘器没有他在灰尘存在运行。搜索结果
设计和设备结果
新的机器人真空吸尘器有两种颜色选择军团可供选择:iCLEBO欧米茄金(YCR-M07-10)和欧米茄iCLEBO怀特(YCR-M07-20)。光滑的塑料机身,但塑料材质是一个非常高的质量和它的盖子没有在表面上留下指纹。白色的机身外壳看起来像一个汽车颜色白/珍珠金属色,就是颜色有一定深度。外形被设计在设计Innodesign局。真空吸尘器的形状不再圆形,特殊的新边刷和合适的形状允许更好的清洁房间的角落。欧米茄是能够清理与效率高达边角角的96%。真空吸尘器有只有87毫米,这意味着它很容易下的床,椅子,柜子驱动,聚集在那里几个月积累灰尘超薄轮廓高度。搜索结果
 搜索结果
连同附加的机器人吸尘器:用于与外部电源,备用的HEPA过滤器(仅在俄罗斯版本交付),磁带塞(长度为1米,可以限制收获区),遥控器的充电的基础上(设定时间,则定时器延时启动,机器人控制,返回基地,模式的选择:强制涡轮增压模式,克服了门槛模式),电池遥控器,清洁刷和真空吸尘器,俄罗斯当然,说明书和保修卡。搜索结果
在外壳盖的顶部防尘袋隔间。集尘器具有一个褶的HEPA过滤器。它可以被容易地清洗碎片,过滤器被安装到锁闩。集尘器可以用水冲洗,但它必须在使用前充分干燥,以防止从主板上的真空吸尘器内受潮。在集尘器外壳和安装橡胶垫圈,一切都相当紧张。在集尘室除尘器的积累没有检测在平板2周的样品后为所有里面。搜索结果
搜索结果
连同附加的机器人吸尘器:用于与外部电源,备用的HEPA过滤器(仅在俄罗斯版本交付),磁带塞(长度为1米,可以限制收获区),遥控器的充电的基础上(设定时间,则定时器延时启动,机器人控制,返回基地,模式的选择:强制涡轮增压模式,克服了门槛模式),电池遥控器,清洁刷和真空吸尘器,俄罗斯当然,说明书和保修卡。搜索结果
在外壳盖的顶部防尘袋隔间。集尘器具有一个褶的HEPA过滤器。它可以被容易地清洗碎片,过滤器被安装到锁闩。集尘器可以用水冲洗,但它必须在使用前充分干燥,以防止从主板上的真空吸尘器内受潮。在集尘器外壳和安装橡胶垫圈,一切都相当紧张。在集尘室除尘器的积累没有检测在平板2周的样品后为所有里面。搜索结果
 搜索结果
搜索结果
 搜索结果
正上方是液晶触摸屏。有了它,你可以打开吸尘器,开始工作,选择清洁模式。 3种工作模式:自动,Max和局部清洁。在自动模式下,真空吸尘器清除所有可用的地方公寓,选择最优化的路线,记忆的最初起点的位置。正如艺术模型使用建立一个视觉地图vSLAM处所的技术。返回到机器人的基座后丢弃一个卡,它是建立重新的下一次。欧米茄模式有另一种技术提高导航公寓 - NST(防滑旅行)。该算法允许恢复对卡空间比较分析,先前创建的路径线路。的最大容量的真空吸尘器中移除的平行线,垂直后面依此类推,直到电池放电。在这种模式下,它也建立地图房间。在本地模式,吸尘一个直径1米的圆圈移除,以螺旋运动。显示屏显示有关开/关模式涡轮抽吸模式克服急流信息。如果克服阈值模式被禁用时,机器人将无法克服5mm的高度。此外,这种模式应该在深色地板使用。以上是大画幅相机具有130度的可视角度。搜索结果
在前保险杠传感器位于所述机器人确定障碍物的距离:PSD-光学和红外传感器。机器人需要来自两个类型的传感器读数。机械触摸传感器也安装在保险杠上,但现在它是一(不像艺术模型),座落在中间。机器人探测障碍物很好,很少与他们接触。对于额外的保护,保险杠家具有橡皮筋,不留下任何痕迹和软化的打击。下壳体的轮廓使克服最多至15mm清洁器的阈值。在壳体的后表面被布置开口吹出空气。搜索结果
搜索结果
正上方是液晶触摸屏。有了它,你可以打开吸尘器,开始工作,选择清洁模式。 3种工作模式:自动,Max和局部清洁。在自动模式下,真空吸尘器清除所有可用的地方公寓,选择最优化的路线,记忆的最初起点的位置。正如艺术模型使用建立一个视觉地图vSLAM处所的技术。返回到机器人的基座后丢弃一个卡,它是建立重新的下一次。欧米茄模式有另一种技术提高导航公寓 - NST(防滑旅行)。该算法允许恢复对卡空间比较分析,先前创建的路径线路。的最大容量的真空吸尘器中移除的平行线,垂直后面依此类推,直到电池放电。在这种模式下,它也建立地图房间。在本地模式,吸尘一个直径1米的圆圈移除,以螺旋运动。显示屏显示有关开/关模式涡轮抽吸模式克服急流信息。如果克服阈值模式被禁用时,机器人将无法克服5mm的高度。此外,这种模式应该在深色地板使用。以上是大画幅相机具有130度的可视角度。搜索结果
在前保险杠传感器位于所述机器人确定障碍物的距离:PSD-光学和红外传感器。机器人需要来自两个类型的传感器读数。机械触摸传感器也安装在保险杠上,但现在它是一(不像艺术模型),座落在中间。机器人探测障碍物很好,很少与他们接触。对于额外的保护,保险杠家具有橡皮筋,不留下任何痕迹和软化的打击。下壳体的轮廓使克服最多至15mm清洁器的阈值。在壳体的后表面被布置开口吹出空气。搜索结果
 搜索结果
我们提请您注意欧米茄底部的设计。映入你的眼睛的第一件事情 - 这是驱动轮,有角度。这种设计郁金机器人决定在与机器人的修饰形式连接申请(现在是不圆的,作为艺术的一种模式),和车轮的远离中心的位移。正是在这样的布置中,车轮清洁器可以在水平地面上适当地展开。我们要求制造商的问题,是否会影响车轮踏面快速磨损?我们被告知,欧米茄的模型,这种形式的因素测试了一年多,提供给这种安排的车轮目前唯一略有不同和一般的任何恶化都不会很长一段时间是可见的。搜索结果
搜索结果
我们提请您注意欧米茄底部的设计。映入你的眼睛的第一件事情 - 这是驱动轮,有角度。这种设计郁金机器人决定在与机器人的修饰形式连接申请(现在是不圆的,作为艺术的一种模式),和车轮的远离中心的位移。正是在这样的布置中,车轮清洁器可以在水平地面上适当地展开。我们要求制造商的问题,是否会影响车轮踏面快速磨损?我们被告知,欧米茄的模型,这种形式的因素测试了一年多,提供给这种安排的车轮目前唯一略有不同和一般的任何恶化都不会很长一段时间是可见的。搜索结果
 搜索结果
另一个独特的不同于市场上的其他机器人 - 使用不同长度的绒毛6瓣边刷的。刷明显比其他机器人硬。在测试过程中,我们观察到良好的业绩podgrebaniya小杂物(大米,谷物),尤其是地毯。用软毛笔刷垃圾收集更糟。主刷模块具有浮动机构。他重复地板轮廓和紧密配合到表面。新橡胶涡轮刷V6刀片很好的工作与任何碎片的收集,包括头发。在罕见sluchayax头发缠绕在刷上两个中央槽,并在边缘刷。轴承隐藏在圆筒形壳体,它一般不期间所有测试缠绕。毫不费力清除它,一不小心失去这将是困难的。搜索结果
前轮下位于车轮磁性传感器的轴,和一个机器人本体油井套管隐蔽 - 以确定所经过的里程表距离。整个结构被设计成这样一种方式,消费者施加最小的努力来清理机器人。不幸的是,头发的一部分将不可避免地在刷子的侧卷绕,并每隔3-4清洗,有必要删除它们用于清洁。边刷去除很容易感谢锚地锁存器。无螺钉或螺栓没有。底部,你还可以将超细纤维布,现在她有更大的尺寸。清洁前,您可以预先滋润布,但你需要一个良好的挤压,以免在潮湿光滑的表面车轮打滑。搜索结果
搜索结果
另一个独特的不同于市场上的其他机器人 - 使用不同长度的绒毛6瓣边刷的。刷明显比其他机器人硬。在测试过程中,我们观察到良好的业绩podgrebaniya小杂物(大米,谷物),尤其是地毯。用软毛笔刷垃圾收集更糟。主刷模块具有浮动机构。他重复地板轮廓和紧密配合到表面。新橡胶涡轮刷V6刀片很好的工作与任何碎片的收集,包括头发。在罕见sluchayax头发缠绕在刷上两个中央槽,并在边缘刷。轴承隐藏在圆筒形壳体,它一般不期间所有测试缠绕。毫不费力清除它,一不小心失去这将是困难的。搜索结果
前轮下位于车轮磁性传感器的轴,和一个机器人本体油井套管隐蔽 - 以确定所经过的里程表距离。整个结构被设计成这样一种方式,消费者施加最小的努力来清理机器人。不幸的是,头发的一部分将不可避免地在刷子的侧卷绕,并每隔3-4清洗,有必要删除它们用于清洁。边刷去除很容易感谢锚地锁存器。无螺钉或螺栓没有。底部,你还可以将超细纤维布,现在她有更大的尺寸。清洁前,您可以预先滋润布,但你需要一个良好的挤压,以免在潮湿光滑的表面车轮打滑。搜索结果
 搜索结果
机器人装置结果
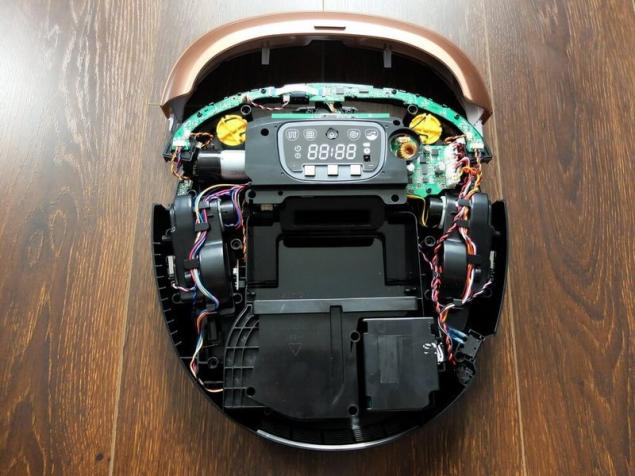
在身体的下部是充电器的接触板,所述传感器确定所述平台的水平,编码器测量由所述前轮(里程表),所述传感器带限制器行进的距离。里程表与传感器的磁带上的霍尔效应的原理工作。让我们来看看吸尘器盖和主机上的一个简短的纲要。拆下顶盖和前保险杠,可以访问到灌装机器人的内部。紧接元素是显而易见的:驱动轮,发动机缸体,电池室,触摸屏(其位于主板下),并与在所述前保险杠的传感器板。在该中心是灰尘。搜索结果
搜索结果
机器人装置结果
在身体的下部是充电器的接触板,所述传感器确定所述平台的水平,编码器测量由所述前轮(里程表),所述传感器带限制器行进的距离。里程表与传感器的磁带上的霍尔效应的原理工作。让我们来看看吸尘器盖和主机上的一个简短的纲要。拆下顶盖和前保险杠,可以访问到灌装机器人的内部。紧接元素是显而易见的:驱动轮,发动机缸体,电池室,触摸屏(其位于主板下),并与在所述前保险杠的传感器板。在该中心是灰尘。搜索结果
 搜索结果
前视图酷似飞碟的外星人未组装。它位于PSD和红外距离传感器的物体。保险杠的中央安装在弹簧机构的机械手的外壳。搜索结果
搜索结果
前视图酷似飞碟的外星人未组装。它位于PSD和红外距离传感器的物体。保险杠的中央安装在弹簧机构的机械手的外壳。搜索结果
 搜索结果
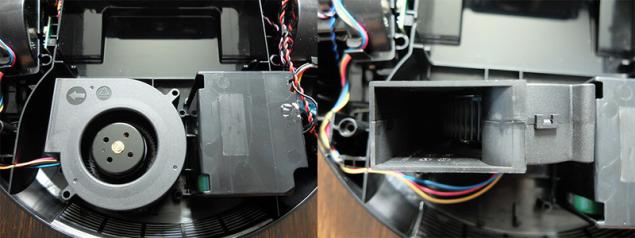
位于所述壳体的后部的电动机部。下罩潜伏着无刷电机具有相对宽的叶片。这款吸尘器的噪音明显比收获期间的竞争更安静。搜索结果
搜索结果
位于所述壳体的后部的电动机部。下罩潜伏着无刷电机具有相对宽的叶片。这款吸尘器的噪音明显比收获期间的竞争更安静。搜索结果
 搜索结果
台达电子公司生产的引擎。特点是上市的反面。搜索结果
搜索结果
台达电子公司生产的引擎。特点是上市的反面。搜索结果
 搜索结果
下的触摸屏的主要主板,其附接至在下面三个轴陀螺仪模块,导出连接器的传感器。位于主板上的微控制器,旨在收集所有的传感器和控制致动器(车轮驱动器等。D.,刷子,和)的信息。他是软件之间导航模块和硬件部件的机器人的链路,。微控制器提供了CPU数据,并从它执行所接收控制命令。 CPU是第二个主板屏幕顶盖相机模块旁边。导航模块在Linux操作系统下工作的,它包含在它的组合物和照相机接口,用于与所述机器人的所有其他组件的通信。操作原理是基于技术的SLAM(同步定位和绘图) - 同步导航和测绘,使用在一个未知的空间来建立映射机器人的方法,与当前位置和行进的距离的同时控制。更新防尘袋车厢连接器输出,但闪过一个真空吸尘器只在服务中心特别节目。搜索结果
搜索结果
下的触摸屏的主要主板,其附接至在下面三个轴陀螺仪模块,导出连接器的传感器。位于主板上的微控制器,旨在收集所有的传感器和控制致动器(车轮驱动器等。D.,刷子,和)的信息。他是软件之间导航模块和硬件部件的机器人的链路,。微控制器提供了CPU数据,并从它执行所接收控制命令。 CPU是第二个主板屏幕顶盖相机模块旁边。导航模块在Linux操作系统下工作的,它包含在它的组合物和照相机接口,用于与所述机器人的所有其他组件的通信。操作原理是基于技术的SLAM(同步定位和绘图) - 同步导航和测绘,使用在一个未知的空间来建立映射机器人的方法,与当前位置和行进的距离的同时控制。更新防尘袋车厢连接器输出,但闪过一个真空吸尘器只在服务中心特别节目。搜索结果
 搜索结果
比较iCLEBO欧米茄模型iCLEBO艺术结果
以前的模型艺术在俄罗斯市场上出售自2013年起。欧米加模型从无到有和许多部件都得到了提高,但不能完全代替艺术,而适合他们的需要和要求每个机器人。现在我们知道为什么。搜索结果
搜索结果
比较iCLEBO欧米茄模型iCLEBO艺术结果
以前的模型艺术在俄罗斯市场上出售自2013年起。欧米加模型从无到有和许多部件都得到了提高,但不能完全代替艺术,而适合他们的需要和要求每个机器人。现在我们知道为什么。搜索结果
 搜索结果
应付地毯,细小的灰尘和动物毛发在房间高达75平方米。米(或多达150平方米的清洗两个周期)的
搜索结果
应付地毯,细小的灰尘和动物毛发在房间高达75平方米。米(或多达150平方米的清洗两个周期)的
 搜索结果
有效在任何光滑表面,适合大房间达150万平方米。米(或在收获的两个周期达到300平方米),市场上最安静的结果,机器人之一
导航技术vSLAM + NST +陀螺仪+里程表+传感器导航技术vSLAM +陀螺仪+ +的里程表传感器搜索
设计特点:两侧刷,为更好的清洁角落,灰尘位于身体的上半部分,浮动刷组件,橡胶涡轮刷的设计特点特殊设计:两个侧刷,圆的设计,灰尘位于机箱后部,用橡皮刮刀帮助林立的涡轮刷结果
清洗方式:自动(蛇),马克斯(双蛇)本地。还有一种湿擦地板模式,卫生巾增加约30%。清洗方式:自动(蛇),最大(+蛇混沌),混沌,本地,湿擦地板(有一个额外的存在传感器拭子)。结果
传感器和换能器:照相机,光学,红外,灰尘传感器,陀螺仪,里程表,滤波器本传感器,霍尔传感器,机械(保险杠,轮和其他)。只有约35检测器和传感器。传感器和传感器:相机,红外,陀螺仪,里程表,霍尔传感器,机械(保险杠,轮等)。只有约25探测器和传感器。结果
电池锂离子电池4400毫安时。在自动模式中的80分钟(在Turbo模式下60分钟)。充电时间180分钟。电池锂离子电池2200毫安。 120分钟。充电时间110分钟。结果
边刷6ti射线僵硬。小结:橡胶V6刃边刷3辐式软。摘要:林立+橡皮刮刀结果
噪音等级:68分贝的噪音水平:55分贝结果
组成:基本与充电电源,遥控器,额外的褶HEPA过滤器,磁带限制器,边刷,拖把模块有两个超细纤维布,电池遥控器,清洁刷清洁器,指令选项:基本与电源充电,遥控器,两个额外的抗菌HEPA过滤器,磁带限制器,边刷,拖把模块有两个超细纤维布,电池遥控器,清洁刷清洁器,指令搜索结果
主要的差别示于表中。正如在前面欧米茄艺术的新模式,很多方面可以看出,但也有更多的弱点,例如,艺术就能在大房间的工作与清洗面积达300平方米。米比欧米茄不能自夸。艺术是安静的,可以同时经营真空吸尘器静静地看电视。欧米茄也并不十分响亮与竞争对手相比,但在手机上通话不再那么舒服。在一般情况下,艺术大机器人,如果使用主要是在光滑的地板,和具有短毛宠物。相反欧米茄,效果很好的地毯,长毛外套是容易收集的动物。这里要注意的是,我们正在谈论低绒头地毯。在高绒头地毯将无法正常工作,没有机器人的市场(或将是无用的他滑倒)。还有在阵容上最年轻的模型 - iCLEBO流行。她没有建造房卡的技术,因此这种模式是适合小公寓,60平方米的面积。米。在这些公寓为他们的2小时的真空吸尘器具有高度概率就能除去所有的可用面积。搜索结果
搜索结果
有效在任何光滑表面,适合大房间达150万平方米。米(或在收获的两个周期达到300平方米),市场上最安静的结果,机器人之一
导航技术vSLAM + NST +陀螺仪+里程表+传感器导航技术vSLAM +陀螺仪+ +的里程表传感器搜索
设计特点:两侧刷,为更好的清洁角落,灰尘位于身体的上半部分,浮动刷组件,橡胶涡轮刷的设计特点特殊设计:两个侧刷,圆的设计,灰尘位于机箱后部,用橡皮刮刀帮助林立的涡轮刷结果
清洗方式:自动(蛇),马克斯(双蛇)本地。还有一种湿擦地板模式,卫生巾增加约30%。清洗方式:自动(蛇),最大(+蛇混沌),混沌,本地,湿擦地板(有一个额外的存在传感器拭子)。结果
传感器和换能器:照相机,光学,红外,灰尘传感器,陀螺仪,里程表,滤波器本传感器,霍尔传感器,机械(保险杠,轮和其他)。只有约35检测器和传感器。传感器和传感器:相机,红外,陀螺仪,里程表,霍尔传感器,机械(保险杠,轮等)。只有约25探测器和传感器。结果
电池锂离子电池4400毫安时。在自动模式中的80分钟(在Turbo模式下60分钟)。充电时间180分钟。电池锂离子电池2200毫安。 120分钟。充电时间110分钟。结果
边刷6ti射线僵硬。小结:橡胶V6刃边刷3辐式软。摘要:林立+橡皮刮刀结果
噪音等级:68分贝的噪音水平:55分贝结果
组成:基本与充电电源,遥控器,额外的褶HEPA过滤器,磁带限制器,边刷,拖把模块有两个超细纤维布,电池遥控器,清洁刷清洁器,指令选项:基本与电源充电,遥控器,两个额外的抗菌HEPA过滤器,磁带限制器,边刷,拖把模块有两个超细纤维布,电池遥控器,清洁刷清洁器,指令搜索结果
主要的差别示于表中。正如在前面欧米茄艺术的新模式,很多方面可以看出,但也有更多的弱点,例如,艺术就能在大房间的工作与清洗面积达300平方米。米比欧米茄不能自夸。艺术是安静的,可以同时经营真空吸尘器静静地看电视。欧米茄也并不十分响亮与竞争对手相比,但在手机上通话不再那么舒服。在一般情况下,艺术大机器人,如果使用主要是在光滑的地板,和具有短毛宠物。相反欧米茄,效果很好的地毯,长毛外套是容易收集的动物。这里要注意的是,我们正在谈论低绒头地毯。在高绒头地毯将无法正常工作,没有机器人的市场(或将是无用的他滑倒)。还有在阵容上最年轻的模型 - iCLEBO流行。她没有建造房卡的技术,因此这种模式是适合小公寓,60平方米的面积。米。在这些公寓为他们的2小时的真空吸尘器具有高度概率就能除去所有的可用面积。搜索结果
 搜索结果
测试结果
我们在机器人清洁器的最重要的特征进行了多次试验 - 清洁质量。由于iCLEBO欧米茄拥有建立一个房卡的机会,踏踏实实跑了大面积 - 不,反正他会在任何地方旅行。在未来,这将是有趣的几个高端的机器人与系统建设的房卡的,碎片散落成光滑的地板和地毯不同的房间进行比较。在此期间,我们重点放在地毯模型的清洗在密闭空间的质量。我们还测量了在约1米的距离操作期间发出的噪声的电平。他没有超过在正常模式66分贝和68分贝Turbo模式。搜索结果
搜索结果
测试结果
我们在机器人清洁器的最重要的特征进行了多次试验 - 清洁质量。由于iCLEBO欧米茄拥有建立一个房卡的机会,踏踏实实跑了大面积 - 不,反正他会在任何地方旅行。在未来,这将是有趣的几个高端的机器人与系统建设的房卡的,碎片散落成光滑的地板和地毯不同的房间进行比较。在此期间,我们重点放在地毯模型的清洗在密闭空间的质量。我们还测量了在约1米的距离操作期间发出的噪声的电平。他没有超过在正常模式66分贝和68分贝Turbo模式。搜索结果
 搜索结果
不幸的是,宠物在测试公寓存在,但有一个与发达50厘米的女人。值得注意的是,几乎所有的头发掉入容器的,但是一些可能仍然缠绕在涡轮刷的边缘与在刷的中间两个凹槽。短发,羊毛会落入灰尘,他们没有时间去纠缠由于高吸流和缺乏涡轮刷毛的。 Также часть длинных волос может попасть на боковые щетки и их необходимо тоже время от времени чистить. Дно робота почти идеально чистое, пыли на нем не оседает. В тестах мы рассыпали сахар по всей комнате и замеряли эффективность сбора 100 гр сахара в одном проходе пылесоса. В связи с тем, что часть мусора разлетается от удара боковых щеток, эффективность в одном проходе не будет достигать 100% результата. В нашем тесте пылесос собрал 94% сахара в комнате за один проход без модуля полотера (влажной протирки пола). Конечно же, если мусор будет лежать непосредственно на пути его следования, то эффективность будет практически 100%. Мы проверяли это, как на мелком мусоре (манка), так и на крупном (изюм). С другой стороны, этот же тип мусора на ковре не разлетается в стороны от боковых щеток и на нем iCLEBO показал даже лучший результат за счет высокой силы всасывания — 95%. Результаты теста на ковре с различным типом крупы представлены в таблице:
搜索结果
不幸的是,宠物在测试公寓存在,但有一个与发达50厘米的女人。值得注意的是,几乎所有的头发掉入容器的,但是一些可能仍然缠绕在涡轮刷的边缘与在刷的中间两个凹槽。短发,羊毛会落入灰尘,他们没有时间去纠缠由于高吸流和缺乏涡轮刷毛的。 Также часть длинных волос может попасть на боковые щетки и их необходимо тоже время от времени чистить. Дно робота почти идеально чистое, пыли на нем не оседает. В тестах мы рассыпали сахар по всей комнате и замеряли эффективность сбора 100 гр сахара в одном проходе пылесоса. В связи с тем, что часть мусора разлетается от удара боковых щеток, эффективность в одном проходе не будет достигать 100% результата. В нашем тесте пылесос собрал 94% сахара в комнате за один проход без модуля полотера (влажной протирки пола). Конечно же, если мусор будет лежать непосредственно на пути его следования, то эффективность будет практически 100%. Мы проверяли это, как на мелком мусоре (манка), так и на крупном (изюм). С другой стороны, этот же тип мусора на ковре не разлетается в стороны от боковых щеток и на нем iCLEBO показал даже лучший результат за счет высокой силы всасывания — 95%. Результаты теста на ковре с различным типом крупы представлены в таблице:
Тип мусора, поверхность — ковер Эффективность
Рис 100%
Сахар 95%
Манка 82%
Как видно из таблицы, результаты очень хорошие, учитывая что у нас полноценный ковер, а не ковролин. Даже такую мельчайшую крупу, как манку, робот собирает очень эффективно. Мы запускали пылесос в режиме влажной протирки пола, в комнате 20 кв. метров салфетка оставалась мокрой в течение всего цикла уборки и за ней был визуально заметен влажный след. Ниже представлено видео с небольшим обзором и тестами.
Выводы
Корейская компания Yujin Robot в своем новом продукте сделала ставку на высокую мощность всасывания и достигла высоких результатов качества уборки. Если популярная модель iCLEBO Arte могла похвастаться хорошей проходимостью (преодолевает пороги до 20 мм), низким уровнем шума (всего 55 Дб), большой площадью уборки (до 300 кв. м. в двух циклах), то в модели Omega производитель сделал упор на достижение высоких результатов при уборке на коврах и легкости обслуживания (волосы почти не наматываются на щетку). В любом случае робот-пылесос нужно подбирать именно под Ваши нужды и потребности, учитывая интерьер помещения и условия использования продукта.
 结果搜索结果
优势结果
在开发新的模式,制造商已就吸收力量的重点,并尽量减少从清洗宠物的毛发和长发主刷的问题。竞争优势的第一和非常重要的欧米茄车型 - 它是真正的高吸力。为了实现这一任务,郁金机器人工程师们使用,以2倍的锂离子电池的高效率和容量的增加,新的无刷涡轮增压发动机与以前的型号艺术(现在,它的容量为4400毫安时)进行比较。机器人是能够有效地甚至收集细尘,如沙子,地毯(用较小的桩)。根据制造商的测试的结果,欧米茄提前在效率方面高达20%的直接的竞争对手。搜索结果
结果搜索结果
优势结果
在开发新的模式,制造商已就吸收力量的重点,并尽量减少从清洗宠物的毛发和长发主刷的问题。竞争优势的第一和非常重要的欧米茄车型 - 它是真正的高吸力。为了实现这一任务,郁金机器人工程师们使用,以2倍的锂离子电池的高效率和容量的增加,新的无刷涡轮增压发动机与以前的型号艺术(现在,它的容量为4400毫安时)进行比较。机器人是能够有效地甚至收集细尘,如沙子,地毯(用较小的桩)。根据制造商的测试的结果,欧米茄提前在效率方面高达20%的直接的竞争对手。搜索结果
 搜索结果
该机器人还采用使用大格式照相机,其位于主体的上部的映射空间的系统。胡佛记得他已经清洗的地方。他记得基座的位置进行充电,并返回它沿最短路径。无论是3或5间卧室的公寓,你吸尘器独自将通过所有可用的房间。如果面积够大,机器人将无法走出一个充电周期,它将返回基地,将继续负责清洁的地方太清楚。欧米茄实现了两个这样的连续周期。如果需要更彻底的清洁或一个小的区域,也可以使用MAX模式,其中第一欧米茄将通过所有的在90度的平行线的可用面积的下端展开,并会继续沿垂直于原始路径清洁同一地方,但在一个方向。这个新政权双蛇,这是不是在艺术典范。搜索结果
通过使用新的橡胶涡轮刷V6叶片吸收高功率的,质量非常高,真空吸尘器收集的头发和宠物皮屑。在主涡轮刷几乎没有毛,羊毛和线程。一切都将落入灰尘,这是非常容易清洗。真空吸尘器的底部,总是干净的,没有必要揉进去。所有你需要做的是空的集尘器和机器人是准备就绪。它的背后需要最少的维护。这一切,我们将测试和实践验证,测试和视频将在本文后面介绍。搜索结果
搜索结果
该机器人还采用使用大格式照相机,其位于主体的上部的映射空间的系统。胡佛记得他已经清洗的地方。他记得基座的位置进行充电,并返回它沿最短路径。无论是3或5间卧室的公寓,你吸尘器独自将通过所有可用的房间。如果面积够大,机器人将无法走出一个充电周期,它将返回基地,将继续负责清洁的地方太清楚。欧米茄实现了两个这样的连续周期。如果需要更彻底的清洁或一个小的区域,也可以使用MAX模式,其中第一欧米茄将通过所有的在90度的平行线的可用面积的下端展开,并会继续沿垂直于原始路径清洁同一地方,但在一个方向。这个新政权双蛇,这是不是在艺术典范。搜索结果
通过使用新的橡胶涡轮刷V6叶片吸收高功率的,质量非常高,真空吸尘器收集的头发和宠物皮屑。在主涡轮刷几乎没有毛,羊毛和线程。一切都将落入灰尘,这是非常容易清洗。真空吸尘器的底部,总是干净的,没有必要揉进去。所有你需要做的是空的集尘器和机器人是准备就绪。它的背后需要最少的维护。这一切,我们将测试和实践验证,测试和视频将在本文后面介绍。搜索结果
 搜索结果
工程师安装了各种新的传感器,诸如传感器和表面识别传感器的污染。如果路径遇到很多垃圾,欧米茄包括这增加了吸力和清洁效率涡轮吸模式。在地毯机器人还自动包括Turbo模式。滤波器存在传感器将不允许真空吸尘器没有他在灰尘存在运行。搜索结果
设计和设备结果
新的机器人真空吸尘器有两种颜色选择军团可供选择:iCLEBO欧米茄金(YCR-M07-10)和欧米茄iCLEBO怀特(YCR-M07-20)。光滑的塑料机身,但塑料材质是一个非常高的质量和它的盖子没有在表面上留下指纹。白色的机身外壳看起来像一个汽车颜色白/珍珠金属色,就是颜色有一定深度。外形被设计在设计Innodesign局。真空吸尘器的形状不再圆形,特殊的新边刷和合适的形状允许更好的清洁房间的角落。欧米茄是能够清理与效率高达边角角的96%。真空吸尘器有只有87毫米,这意味着它很容易下的床,椅子,柜子驱动,聚集在那里几个月积累灰尘超薄轮廓高度。搜索结果
搜索结果
工程师安装了各种新的传感器,诸如传感器和表面识别传感器的污染。如果路径遇到很多垃圾,欧米茄包括这增加了吸力和清洁效率涡轮吸模式。在地毯机器人还自动包括Turbo模式。滤波器存在传感器将不允许真空吸尘器没有他在灰尘存在运行。搜索结果
设计和设备结果
新的机器人真空吸尘器有两种颜色选择军团可供选择:iCLEBO欧米茄金(YCR-M07-10)和欧米茄iCLEBO怀特(YCR-M07-20)。光滑的塑料机身,但塑料材质是一个非常高的质量和它的盖子没有在表面上留下指纹。白色的机身外壳看起来像一个汽车颜色白/珍珠金属色,就是颜色有一定深度。外形被设计在设计Innodesign局。真空吸尘器的形状不再圆形,特殊的新边刷和合适的形状允许更好的清洁房间的角落。欧米茄是能够清理与效率高达边角角的96%。真空吸尘器有只有87毫米,这意味着它很容易下的床,椅子,柜子驱动,聚集在那里几个月积累灰尘超薄轮廓高度。搜索结果
 搜索结果
连同附加的机器人吸尘器:用于与外部电源,备用的HEPA过滤器(仅在俄罗斯版本交付),磁带塞(长度为1米,可以限制收获区),遥控器的充电的基础上(设定时间,则定时器延时启动,机器人控制,返回基地,模式的选择:强制涡轮增压模式,克服了门槛模式),电池遥控器,清洁刷和真空吸尘器,俄罗斯当然,说明书和保修卡。搜索结果
在外壳盖的顶部防尘袋隔间。集尘器具有一个褶的HEPA过滤器。它可以被容易地清洗碎片,过滤器被安装到锁闩。集尘器可以用水冲洗,但它必须在使用前充分干燥,以防止从主板上的真空吸尘器内受潮。在集尘器外壳和安装橡胶垫圈,一切都相当紧张。在集尘室除尘器的积累没有检测在平板2周的样品后为所有里面。搜索结果
搜索结果
连同附加的机器人吸尘器:用于与外部电源,备用的HEPA过滤器(仅在俄罗斯版本交付),磁带塞(长度为1米,可以限制收获区),遥控器的充电的基础上(设定时间,则定时器延时启动,机器人控制,返回基地,模式的选择:强制涡轮增压模式,克服了门槛模式),电池遥控器,清洁刷和真空吸尘器,俄罗斯当然,说明书和保修卡。搜索结果
在外壳盖的顶部防尘袋隔间。集尘器具有一个褶的HEPA过滤器。它可以被容易地清洗碎片,过滤器被安装到锁闩。集尘器可以用水冲洗,但它必须在使用前充分干燥,以防止从主板上的真空吸尘器内受潮。在集尘器外壳和安装橡胶垫圈,一切都相当紧张。在集尘室除尘器的积累没有检测在平板2周的样品后为所有里面。搜索结果
 搜索结果
搜索结果
 搜索结果
正上方是液晶触摸屏。有了它,你可以打开吸尘器,开始工作,选择清洁模式。 3种工作模式:自动,Max和局部清洁。在自动模式下,真空吸尘器清除所有可用的地方公寓,选择最优化的路线,记忆的最初起点的位置。正如艺术模型使用建立一个视觉地图vSLAM处所的技术。返回到机器人的基座后丢弃一个卡,它是建立重新的下一次。欧米茄模式有另一种技术提高导航公寓 - NST(防滑旅行)。该算法允许恢复对卡空间比较分析,先前创建的路径线路。的最大容量的真空吸尘器中移除的平行线,垂直后面依此类推,直到电池放电。在这种模式下,它也建立地图房间。在本地模式,吸尘一个直径1米的圆圈移除,以螺旋运动。显示屏显示有关开/关模式涡轮抽吸模式克服急流信息。如果克服阈值模式被禁用时,机器人将无法克服5mm的高度。此外,这种模式应该在深色地板使用。以上是大画幅相机具有130度的可视角度。搜索结果
在前保险杠传感器位于所述机器人确定障碍物的距离:PSD-光学和红外传感器。机器人需要来自两个类型的传感器读数。机械触摸传感器也安装在保险杠上,但现在它是一(不像艺术模型),座落在中间。机器人探测障碍物很好,很少与他们接触。对于额外的保护,保险杠家具有橡皮筋,不留下任何痕迹和软化的打击。下壳体的轮廓使克服最多至15mm清洁器的阈值。在壳体的后表面被布置开口吹出空气。搜索结果
搜索结果
正上方是液晶触摸屏。有了它,你可以打开吸尘器,开始工作,选择清洁模式。 3种工作模式:自动,Max和局部清洁。在自动模式下,真空吸尘器清除所有可用的地方公寓,选择最优化的路线,记忆的最初起点的位置。正如艺术模型使用建立一个视觉地图vSLAM处所的技术。返回到机器人的基座后丢弃一个卡,它是建立重新的下一次。欧米茄模式有另一种技术提高导航公寓 - NST(防滑旅行)。该算法允许恢复对卡空间比较分析,先前创建的路径线路。的最大容量的真空吸尘器中移除的平行线,垂直后面依此类推,直到电池放电。在这种模式下,它也建立地图房间。在本地模式,吸尘一个直径1米的圆圈移除,以螺旋运动。显示屏显示有关开/关模式涡轮抽吸模式克服急流信息。如果克服阈值模式被禁用时,机器人将无法克服5mm的高度。此外,这种模式应该在深色地板使用。以上是大画幅相机具有130度的可视角度。搜索结果
在前保险杠传感器位于所述机器人确定障碍物的距离:PSD-光学和红外传感器。机器人需要来自两个类型的传感器读数。机械触摸传感器也安装在保险杠上,但现在它是一(不像艺术模型),座落在中间。机器人探测障碍物很好,很少与他们接触。对于额外的保护,保险杠家具有橡皮筋,不留下任何痕迹和软化的打击。下壳体的轮廓使克服最多至15mm清洁器的阈值。在壳体的后表面被布置开口吹出空气。搜索结果
 搜索结果
我们提请您注意欧米茄底部的设计。映入你的眼睛的第一件事情 - 这是驱动轮,有角度。这种设计郁金机器人决定在与机器人的修饰形式连接申请(现在是不圆的,作为艺术的一种模式),和车轮的远离中心的位移。正是在这样的布置中,车轮清洁器可以在水平地面上适当地展开。我们要求制造商的问题,是否会影响车轮踏面快速磨损?我们被告知,欧米茄的模型,这种形式的因素测试了一年多,提供给这种安排的车轮目前唯一略有不同和一般的任何恶化都不会很长一段时间是可见的。搜索结果
搜索结果
我们提请您注意欧米茄底部的设计。映入你的眼睛的第一件事情 - 这是驱动轮,有角度。这种设计郁金机器人决定在与机器人的修饰形式连接申请(现在是不圆的,作为艺术的一种模式),和车轮的远离中心的位移。正是在这样的布置中,车轮清洁器可以在水平地面上适当地展开。我们要求制造商的问题,是否会影响车轮踏面快速磨损?我们被告知,欧米茄的模型,这种形式的因素测试了一年多,提供给这种安排的车轮目前唯一略有不同和一般的任何恶化都不会很长一段时间是可见的。搜索结果
 搜索结果
另一个独特的不同于市场上的其他机器人 - 使用不同长度的绒毛6瓣边刷的。刷明显比其他机器人硬。在测试过程中,我们观察到良好的业绩podgrebaniya小杂物(大米,谷物),尤其是地毯。用软毛笔刷垃圾收集更糟。主刷模块具有浮动机构。他重复地板轮廓和紧密配合到表面。新橡胶涡轮刷V6刀片很好的工作与任何碎片的收集,包括头发。在罕见sluchayax头发缠绕在刷上两个中央槽,并在边缘刷。轴承隐藏在圆筒形壳体,它一般不期间所有测试缠绕。毫不费力清除它,一不小心失去这将是困难的。搜索结果
前轮下位于车轮磁性传感器的轴,和一个机器人本体油井套管隐蔽 - 以确定所经过的里程表距离。整个结构被设计成这样一种方式,消费者施加最小的努力来清理机器人。不幸的是,头发的一部分将不可避免地在刷子的侧卷绕,并每隔3-4清洗,有必要删除它们用于清洁。边刷去除很容易感谢锚地锁存器。无螺钉或螺栓没有。底部,你还可以将超细纤维布,现在她有更大的尺寸。清洁前,您可以预先滋润布,但你需要一个良好的挤压,以免在潮湿光滑的表面车轮打滑。搜索结果
搜索结果
另一个独特的不同于市场上的其他机器人 - 使用不同长度的绒毛6瓣边刷的。刷明显比其他机器人硬。在测试过程中,我们观察到良好的业绩podgrebaniya小杂物(大米,谷物),尤其是地毯。用软毛笔刷垃圾收集更糟。主刷模块具有浮动机构。他重复地板轮廓和紧密配合到表面。新橡胶涡轮刷V6刀片很好的工作与任何碎片的收集,包括头发。在罕见sluchayax头发缠绕在刷上两个中央槽,并在边缘刷。轴承隐藏在圆筒形壳体,它一般不期间所有测试缠绕。毫不费力清除它,一不小心失去这将是困难的。搜索结果
前轮下位于车轮磁性传感器的轴,和一个机器人本体油井套管隐蔽 - 以确定所经过的里程表距离。整个结构被设计成这样一种方式,消费者施加最小的努力来清理机器人。不幸的是,头发的一部分将不可避免地在刷子的侧卷绕,并每隔3-4清洗,有必要删除它们用于清洁。边刷去除很容易感谢锚地锁存器。无螺钉或螺栓没有。底部,你还可以将超细纤维布,现在她有更大的尺寸。清洁前,您可以预先滋润布,但你需要一个良好的挤压,以免在潮湿光滑的表面车轮打滑。搜索结果
 搜索结果
机器人装置结果
在身体的下部是充电器的接触板,所述传感器确定所述平台的水平,编码器测量由所述前轮(里程表),所述传感器带限制器行进的距离。里程表与传感器的磁带上的霍尔效应的原理工作。让我们来看看吸尘器盖和主机上的一个简短的纲要。拆下顶盖和前保险杠,可以访问到灌装机器人的内部。紧接元素是显而易见的:驱动轮,发动机缸体,电池室,触摸屏(其位于主板下),并与在所述前保险杠的传感器板。在该中心是灰尘。搜索结果
搜索结果
机器人装置结果
在身体的下部是充电器的接触板,所述传感器确定所述平台的水平,编码器测量由所述前轮(里程表),所述传感器带限制器行进的距离。里程表与传感器的磁带上的霍尔效应的原理工作。让我们来看看吸尘器盖和主机上的一个简短的纲要。拆下顶盖和前保险杠,可以访问到灌装机器人的内部。紧接元素是显而易见的:驱动轮,发动机缸体,电池室,触摸屏(其位于主板下),并与在所述前保险杠的传感器板。在该中心是灰尘。搜索结果
 搜索结果
前视图酷似飞碟的外星人未组装。它位于PSD和红外距离传感器的物体。保险杠的中央安装在弹簧机构的机械手的外壳。搜索结果
搜索结果
前视图酷似飞碟的外星人未组装。它位于PSD和红外距离传感器的物体。保险杠的中央安装在弹簧机构的机械手的外壳。搜索结果
 搜索结果
位于所述壳体的后部的电动机部。下罩潜伏着无刷电机具有相对宽的叶片。这款吸尘器的噪音明显比收获期间的竞争更安静。搜索结果
搜索结果
位于所述壳体的后部的电动机部。下罩潜伏着无刷电机具有相对宽的叶片。这款吸尘器的噪音明显比收获期间的竞争更安静。搜索结果
 搜索结果
台达电子公司生产的引擎。特点是上市的反面。搜索结果
搜索结果
台达电子公司生产的引擎。特点是上市的反面。搜索结果
 搜索结果
下的触摸屏的主要主板,其附接至在下面三个轴陀螺仪模块,导出连接器的传感器。位于主板上的微控制器,旨在收集所有的传感器和控制致动器(车轮驱动器等。D.,刷子,和)的信息。他是软件之间导航模块和硬件部件的机器人的链路,。微控制器提供了CPU数据,并从它执行所接收控制命令。 CPU是第二个主板屏幕顶盖相机模块旁边。导航模块在Linux操作系统下工作的,它包含在它的组合物和照相机接口,用于与所述机器人的所有其他组件的通信。操作原理是基于技术的SLAM(同步定位和绘图) - 同步导航和测绘,使用在一个未知的空间来建立映射机器人的方法,与当前位置和行进的距离的同时控制。更新防尘袋车厢连接器输出,但闪过一个真空吸尘器只在服务中心特别节目。搜索结果
搜索结果
下的触摸屏的主要主板,其附接至在下面三个轴陀螺仪模块,导出连接器的传感器。位于主板上的微控制器,旨在收集所有的传感器和控制致动器(车轮驱动器等。D.,刷子,和)的信息。他是软件之间导航模块和硬件部件的机器人的链路,。微控制器提供了CPU数据,并从它执行所接收控制命令。 CPU是第二个主板屏幕顶盖相机模块旁边。导航模块在Linux操作系统下工作的,它包含在它的组合物和照相机接口,用于与所述机器人的所有其他组件的通信。操作原理是基于技术的SLAM(同步定位和绘图) - 同步导航和测绘,使用在一个未知的空间来建立映射机器人的方法,与当前位置和行进的距离的同时控制。更新防尘袋车厢连接器输出,但闪过一个真空吸尘器只在服务中心特别节目。搜索结果
 搜索结果
比较iCLEBO欧米茄模型iCLEBO艺术结果
以前的模型艺术在俄罗斯市场上出售自2013年起。欧米加模型从无到有和许多部件都得到了提高,但不能完全代替艺术,而适合他们的需要和要求每个机器人。现在我们知道为什么。搜索结果
搜索结果
比较iCLEBO欧米茄模型iCLEBO艺术结果
以前的模型艺术在俄罗斯市场上出售自2013年起。欧米加模型从无到有和许多部件都得到了提高,但不能完全代替艺术,而适合他们的需要和要求每个机器人。现在我们知道为什么。搜索结果
 搜索结果
应付地毯,细小的灰尘和动物毛发在房间高达75平方米。米(或多达150平方米的清洗两个周期)的
搜索结果
应付地毯,细小的灰尘和动物毛发在房间高达75平方米。米(或多达150平方米的清洗两个周期)的 搜索结果
有效在任何光滑表面,适合大房间达150万平方米。米(或在收获的两个周期达到300平方米),市场上最安静的结果,机器人之一
导航技术vSLAM + NST +陀螺仪+里程表+传感器导航技术vSLAM +陀螺仪+ +的里程表传感器搜索
设计特点:两侧刷,为更好的清洁角落,灰尘位于身体的上半部分,浮动刷组件,橡胶涡轮刷的设计特点特殊设计:两个侧刷,圆的设计,灰尘位于机箱后部,用橡皮刮刀帮助林立的涡轮刷结果
清洗方式:自动(蛇),马克斯(双蛇)本地。还有一种湿擦地板模式,卫生巾增加约30%。清洗方式:自动(蛇),最大(+蛇混沌),混沌,本地,湿擦地板(有一个额外的存在传感器拭子)。结果
传感器和换能器:照相机,光学,红外,灰尘传感器,陀螺仪,里程表,滤波器本传感器,霍尔传感器,机械(保险杠,轮和其他)。只有约35检测器和传感器。传感器和传感器:相机,红外,陀螺仪,里程表,霍尔传感器,机械(保险杠,轮等)。只有约25探测器和传感器。结果
电池锂离子电池4400毫安时。在自动模式中的80分钟(在Turbo模式下60分钟)。充电时间180分钟。电池锂离子电池2200毫安。 120分钟。充电时间110分钟。结果
边刷6ti射线僵硬。小结:橡胶V6刃边刷3辐式软。摘要:林立+橡皮刮刀结果
噪音等级:68分贝的噪音水平:55分贝结果
组成:基本与充电电源,遥控器,额外的褶HEPA过滤器,磁带限制器,边刷,拖把模块有两个超细纤维布,电池遥控器,清洁刷清洁器,指令选项:基本与电源充电,遥控器,两个额外的抗菌HEPA过滤器,磁带限制器,边刷,拖把模块有两个超细纤维布,电池遥控器,清洁刷清洁器,指令搜索结果
主要的差别示于表中。正如在前面欧米茄艺术的新模式,很多方面可以看出,但也有更多的弱点,例如,艺术就能在大房间的工作与清洗面积达300平方米。米比欧米茄不能自夸。艺术是安静的,可以同时经营真空吸尘器静静地看电视。欧米茄也并不十分响亮与竞争对手相比,但在手机上通话不再那么舒服。在一般情况下,艺术大机器人,如果使用主要是在光滑的地板,和具有短毛宠物。相反欧米茄,效果很好的地毯,长毛外套是容易收集的动物。这里要注意的是,我们正在谈论低绒头地毯。在高绒头地毯将无法正常工作,没有机器人的市场(或将是无用的他滑倒)。还有在阵容上最年轻的模型 - iCLEBO流行。她没有建造房卡的技术,因此这种模式是适合小公寓,60平方米的面积。米。在这些公寓为他们的2小时的真空吸尘器具有高度概率就能除去所有的可用面积。搜索结果
搜索结果
有效在任何光滑表面,适合大房间达150万平方米。米(或在收获的两个周期达到300平方米),市场上最安静的结果,机器人之一
导航技术vSLAM + NST +陀螺仪+里程表+传感器导航技术vSLAM +陀螺仪+ +的里程表传感器搜索
设计特点:两侧刷,为更好的清洁角落,灰尘位于身体的上半部分,浮动刷组件,橡胶涡轮刷的设计特点特殊设计:两个侧刷,圆的设计,灰尘位于机箱后部,用橡皮刮刀帮助林立的涡轮刷结果
清洗方式:自动(蛇),马克斯(双蛇)本地。还有一种湿擦地板模式,卫生巾增加约30%。清洗方式:自动(蛇),最大(+蛇混沌),混沌,本地,湿擦地板(有一个额外的存在传感器拭子)。结果
传感器和换能器:照相机,光学,红外,灰尘传感器,陀螺仪,里程表,滤波器本传感器,霍尔传感器,机械(保险杠,轮和其他)。只有约35检测器和传感器。传感器和传感器:相机,红外,陀螺仪,里程表,霍尔传感器,机械(保险杠,轮等)。只有约25探测器和传感器。结果
电池锂离子电池4400毫安时。在自动模式中的80分钟(在Turbo模式下60分钟)。充电时间180分钟。电池锂离子电池2200毫安。 120分钟。充电时间110分钟。结果
边刷6ti射线僵硬。小结:橡胶V6刃边刷3辐式软。摘要:林立+橡皮刮刀结果
噪音等级:68分贝的噪音水平:55分贝结果
组成:基本与充电电源,遥控器,额外的褶HEPA过滤器,磁带限制器,边刷,拖把模块有两个超细纤维布,电池遥控器,清洁刷清洁器,指令选项:基本与电源充电,遥控器,两个额外的抗菌HEPA过滤器,磁带限制器,边刷,拖把模块有两个超细纤维布,电池遥控器,清洁刷清洁器,指令搜索结果
主要的差别示于表中。正如在前面欧米茄艺术的新模式,很多方面可以看出,但也有更多的弱点,例如,艺术就能在大房间的工作与清洗面积达300平方米。米比欧米茄不能自夸。艺术是安静的,可以同时经营真空吸尘器静静地看电视。欧米茄也并不十分响亮与竞争对手相比,但在手机上通话不再那么舒服。在一般情况下,艺术大机器人,如果使用主要是在光滑的地板,和具有短毛宠物。相反欧米茄,效果很好的地毯,长毛外套是容易收集的动物。这里要注意的是,我们正在谈论低绒头地毯。在高绒头地毯将无法正常工作,没有机器人的市场(或将是无用的他滑倒)。还有在阵容上最年轻的模型 - iCLEBO流行。她没有建造房卡的技术,因此这种模式是适合小公寓,60平方米的面积。米。在这些公寓为他们的2小时的真空吸尘器具有高度概率就能除去所有的可用面积。搜索结果
 搜索结果
测试结果
我们在机器人清洁器的最重要的特征进行了多次试验 - 清洁质量。由于iCLEBO欧米茄拥有建立一个房卡的机会,踏踏实实跑了大面积 - 不,反正他会在任何地方旅行。在未来,这将是有趣的几个高端的机器人与系统建设的房卡的,碎片散落成光滑的地板和地毯不同的房间进行比较。在此期间,我们重点放在地毯模型的清洗在密闭空间的质量。我们还测量了在约1米的距离操作期间发出的噪声的电平。他没有超过在正常模式66分贝和68分贝Turbo模式。搜索结果
搜索结果
测试结果
我们在机器人清洁器的最重要的特征进行了多次试验 - 清洁质量。由于iCLEBO欧米茄拥有建立一个房卡的机会,踏踏实实跑了大面积 - 不,反正他会在任何地方旅行。在未来,这将是有趣的几个高端的机器人与系统建设的房卡的,碎片散落成光滑的地板和地毯不同的房间进行比较。在此期间,我们重点放在地毯模型的清洗在密闭空间的质量。我们还测量了在约1米的距离操作期间发出的噪声的电平。他没有超过在正常模式66分贝和68分贝Turbo模式。搜索结果
 搜索结果
不幸的是,宠物在测试公寓存在,但有一个与发达50厘米的女人。值得注意的是,几乎所有的头发掉入容器的,但是一些可能仍然缠绕在涡轮刷的边缘与在刷的中间两个凹槽。短发,羊毛会落入灰尘,他们没有时间去纠缠由于高吸流和缺乏涡轮刷毛的。 Также часть длинных волос может попасть на боковые щетки и их необходимо тоже время от времени чистить. Дно робота почти идеально чистое, пыли на нем не оседает. В тестах мы рассыпали сахар по всей комнате и замеряли эффективность сбора 100 гр сахара в одном проходе пылесоса. В связи с тем, что часть мусора разлетается от удара боковых щеток, эффективность в одном проходе не будет достигать 100% результата. В нашем тесте пылесос собрал 94% сахара в комнате за один проход без модуля полотера (влажной протирки пола). Конечно же, если мусор будет лежать непосредственно на пути его следования, то эффективность будет практически 100%. Мы проверяли это, как на мелком мусоре (манка), так и на крупном (изюм). С другой стороны, этот же тип мусора на ковре не разлетается в стороны от боковых щеток и на нем iCLEBO показал даже лучший результат за счет высокой силы всасывания — 95%. Результаты теста на ковре с различным типом крупы представлены в таблице:
搜索结果
不幸的是,宠物在测试公寓存在,但有一个与发达50厘米的女人。值得注意的是,几乎所有的头发掉入容器的,但是一些可能仍然缠绕在涡轮刷的边缘与在刷的中间两个凹槽。短发,羊毛会落入灰尘,他们没有时间去纠缠由于高吸流和缺乏涡轮刷毛的。 Также часть длинных волос может попасть на боковые щетки и их необходимо тоже время от времени чистить. Дно робота почти идеально чистое, пыли на нем не оседает. В тестах мы рассыпали сахар по всей комнате и замеряли эффективность сбора 100 гр сахара в одном проходе пылесоса. В связи с тем, что часть мусора разлетается от удара боковых щеток, эффективность в одном проходе не будет достигать 100% результата. В нашем тесте пылесос собрал 94% сахара в комнате за один проход без модуля полотера (влажной протирки пола). Конечно же, если мусор будет лежать непосредственно на пути его следования, то эффективность будет практически 100%. Мы проверяли это, как на мелком мусоре (манка), так и на крупном (изюм). С другой стороны, этот же тип мусора на ковре не разлетается в стороны от боковых щеток и на нем iCLEBO показал даже лучший результат за счет высокой силы всасывания — 95%. Результаты теста на ковре с различным типом крупы представлены в таблице:Тип мусора, поверхность — ковер Эффективность
Рис 100%
Сахар 95%
Манка 82%
Как видно из таблицы, результаты очень хорошие, учитывая что у нас полноценный ковер, а не ковролин. Даже такую мельчайшую крупу, как манку, робот собирает очень эффективно. Мы запускали пылесос в режиме влажной протирки пола, в комнате 20 кв. метров салфетка оставалась мокрой в течение всего цикла уборки и за ней был визуально заметен влажный след. Ниже представлено видео с небольшим обзором и тестами.
Выводы
Корейская компания Yujin Robot в своем новом продукте сделала ставку на высокую мощность всасывания и достигла высоких результатов качества уборки. Если популярная модель iCLEBO Arte могла похвастаться хорошей проходимостью (преодолевает пороги до 20 мм), низким уровнем шума (всего 55 Дб), большой площадью уборки (до 300 кв. м. в двух циклах), то в модели Omega производитель сделал упор на достижение высоких результатов при уборке на коврах и легкости обслуживания (волосы почти не наматываются на щетку). В любом случае робот-пылесос нужно подбирать именно под Ваши нужды и потребности, учитывая интерьер помещения и условия использования продукта.