A medida que el robot DRC-HUBO de Corea del Sur ganó el Desafío DARPA Robotics
El sábado, el equipo coreano principal instituto científico y tecnológico (KAIST) de Corea del Sur ganó el DARPA Robotics Challenge (RDC) en Pomona (CA), cuando su robot adaptable Humanoid DRC-HUBO , победил Otros 22 robots de cinco países diferentes y ganó el primer premio de $ 2 millones.

La capacidad de transformarse de un robot que camina con dos piernas en el automóvil a las ruedas ha sido instrumental en conseguir el premio. Muchos robots han perdido el equilibrio y cayó al suelo, abriendo la puerta o trabajando con un taladro. Pero no DRC-HUBO
Pasando dos piernas [robot] todavía no es estable - dijo Jung Ho Oh, profesor de ingeniería mecánica en el principal instituto científico y tecnológico de la Corea, jefe del equipo de KAIST. - Si algo salió mal - el resultado puede ser catastrófico
. Blockquote>

Dijo que el robot humanoide tiene ventajas cuando se trabaja en la compañía de la gente, pero él quería desarrollar un diseño que minimiza el riesgo de caídas, "Pensé en muchas cosas, y era muy simple - la rueda en su regazo"
.
< DRC-HUBO puede cambiar su postura, de pie sobre dos piernas, caminar, alcanzar objetos, que son altos, y el paso a una posición más estable en su regazo.
< DARPA han decidido organizar República Democrática del Congo después del incidente de Fukushima en Japón, con la esperanza de avanzar en el campo de la robótica. En соревнование Finales RDC fueron invitados al equipo, desarrollo de robots semiautónomos y operadores humanos tienen que trabajar juntos en entorno de simulación de desastres. Robots por universidades y empresas para competir muy diferentes en tamaño y forma, algunos de ellos son robots con patas, ruedas, así como híbridos.
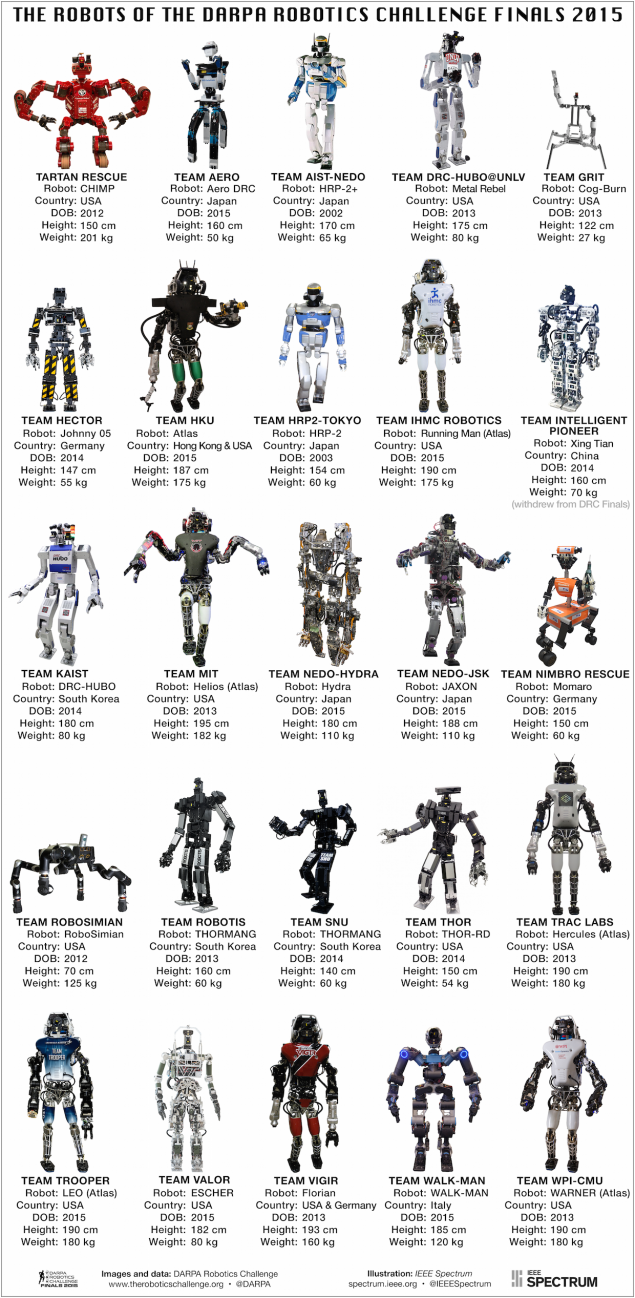
< DRC-HUBO fue el ganador, ya que fue capaz de realizar todas las ocho tareas sin errores en el menor tiempo (44 min. 28 seg). Otros equipos también tuvieron un buen desempeño, pero a causa de los retrasos en sus robots perdieron tiempo. Entre los mejores - equipo de Rescate del tartán , el CHIMPANCÉ - un robot con patas y Track, que era capaz de volver al trabajo después de la caída; < Momaro en el equipo de la Universidad de Bonn - máquina simple y elegante en las ruedas, con una cabeza giratoria con dos manos; < RoboSimian en el Laboratorio de Propulsión a Chorro de la NASA, con cuatro piernas y movimientos de yoga napominayuschimim; < ATLAS Los equipos de la IHMC - un gran robot humanoide eléctrico desarrollado por Boston Dinámica

DRC-HUBO realiza la tarea de cerrar la válvula. Tenga en cuenta que la parte superior de su cuerpo se gira 180 grados. I>
Flexibilidad - es el más importante, - dijo el director de DARPA y organizador de la reunión RDC Jill Pratt con los periodistas, al comentar sobre el diseño de robots. - El robot, que es capaz de cambiar la configuración del uso de los pies a la utilización de las ruedas, puede tener un diseño más complicado y más peso, pero le dará esta flexibilidad
. Blockquote>
Profesor O es un experto reconocido internacionalmente en el robot humanoide. Él y sus estudiantes de la KAIST en Daejeon (Corea del Sur) para mejorar HUBO su plataforma para varias generaciones. A continuación se muestra un video que ya es desde hace varios años: cuando el profesor hace personal HUBO 2:
Para Finales República Democrática del Congo que decidió modificar significativamente el robot para prepararlo para posibles puestos de trabajo. La clase magistral después del evento de la profesora dijo que DRC-HUBO "no es diferente, es sólo un robot humanoide." Pero, de hecho, su equipo KAIST considerar cuidadosamente cada detalle. Se estimó que el costo de cada robot en aproximadamente $ 500,000 y $ 1 millón que sigue son las principales características que han ayudado a DRC-HUBO para hacer frente a las tareas de:.
< 1. Ruedas en las rodillas: DRC-HUBO tiene ruedas en ambas rodillas y los pies en los rodillos. Las ruedas permiten que el robot se mueva con rapidez y de manera constante. Moverse por el suelo, utiliza sensores ópticos en las piernas para medir la distancia utilizando el flujo óptico.
< 2. Motores potentes: y SCHAFT - un robot, que ganó la competición preliminar DARPA y приобретенный por Google , DRC-HUBO es un muy potentes motores (tenían 33 con 31 grados de libertad de circulación). Debido a las especializadas de motor y refrigeración (ventiladores y hojas), el robot puede usar un voltaje de 4.3 veces mayor que el indicado en las especificaciones del motor, con una tasa máxima de 30 amperios en algunos casos.
< 3. Compatibilidad: equipo quería hacer un robot sensores de fuerza de torsión que cumplen sin el uso del regulador convencional y automática (temía que iba a llevar a la inestabilidad). Por lo tanto, un amplificador especial se transfiere al problema de la compatibilidad del controlador de motor.
< 4. Rotary Torso: DRC-HUBO Mauger gire la parte superior de su cuerpo 180 grados. Esto significa que las rodillas del robot se pueden implementar a un lado y ver al mismo tiempo capaz de lo contrario (que lo pruebes!). Esta capacidad no sólo funciona cuando está, pero cuando está de rodillas. El robot utiliza esta oportunidad en varias tareas cuando sea necesario: para conducir el vehículo, perforado la pared, mueva a través de los escombros y sube las escaleras
.
< 5. Brazos largos: los miembros del equipo KAIST se han dado cuenta de que la mano HUBO 2 es demasiado corta para algunas tareas, por lo que hicieron un largo, girando 7 grados. También se escondieron todos los cables en el interior, por lo que no se enganchen en los objetos circundantes. Cada mano puede soportar el peso de hasta 15 kg, y tiene una "pinza adaptable", que puede perder los elementos duros y blandos.
< 6. Detección simplificado: En lugar de llenar sus sensores en la cabeza, cámaras estereoscópicas y lidar, que constantemente analizar su entorno (la tecnología utiliza un robot ATLAS, por ejemplo), DRC-HUBO es un sistema de visión simplificada; Los operadores se basan en la célula normal la mayor parte del tiempo, y lidar adjunta al actuador, escanea el medio ambiente circundante sólo cuando sea necesario. De hecho, el robot no es la cabeza - "sólo los ojos", dijo uno de los estudiantes KAIST
.
< 7. Potencia: cuando el motor requiere más potencia, el sistema de fuente de alimentación principal puede no ser capaz de proporcionar suficiente energía a los componentes importantes de la máquina. Para evitar esto, el equipo utilizó un super condensador, que suministra energía a las computadoras, los canales de transmisión, y algunos sensores y giroscopios, incluso si el sistema de alimentación principal falla.
< 8. El software especial: comando utiliza el sistema operativo en tiempo real para Linux Xenomai y un marco especial de control de movimiento, que se llama PODO (el desarrollo de KAIST ). También implica entorno de modelado Gazebo. El equipo ha desarrollado su software con un enfoque de bajo ancho de banda y conexión inestable entre los operadores y el robot.

Ahora vamos a echar un vistazo más de cerca DRC-HUBO y la forma en que celebró ocho puestos de trabajo que llevaron la victoria al equipo de la KAIST (si quieres ver todo completo, esto se puede hacer por enlace, versión acelerada aquí):
1. Ajuste en la conducción.
Los equipos están autorizados a realizar modificaciones en el vehículo Polaris , sus robots han sido más fácil a los coches que entran y salen de ella. Equipo KAIST dispositivo metálico instalado con dos palancas en la parte inferior del coche; Cuando DRC-HUBO , haga clic en una de las palancas, sistema de cable trabajó de manera que la segunda palanca se presiona el acelerador. Con la mano izquierda se aferra a un coche robot, y el derecho a administrar la rueda. Él realizó esta tarea muy rápido (el proceso tomó un poco más de un minuto), y, a diferencia de los otros equipos no impidió que pasa obstáculos.
2. Configuración de salir del vehículo.
Fue una de las tareas más difíciles. En preparación para ello, el profesor Oh, nos dijo, salió del coche varias veces para entender qué parte del movimiento del cuerpo y la utiliza. Llegó a la conclusión de que se necesitaría un "enfoque dinámico". Su equipo ha programado DRC-HUBO para que él levantó las manos y se aferró a la estructura de la máquina. El robot utiliza 100 newtons de empuje para cada mano. Cuando se levantó el cuerpo del brazo del robot, cae en gran medida fuera del coche, aunque el movimiento es controlado (gracias al "enfoque dinámico"). Preste atención a su excelente maniobra para salir del coche en alrededor de las 1:00!
Sobre el profesor dijo que si bien el desarrollo de este movimiento quemó unos motores, pero el problema fue resuelto mediante el uso de los más potentes motores, especialmente fabricados. Por el momento, el robot puede dejar el coche en menos de 4 minutos, y cuando estaba en la tierra, él se arrodilla y se va.
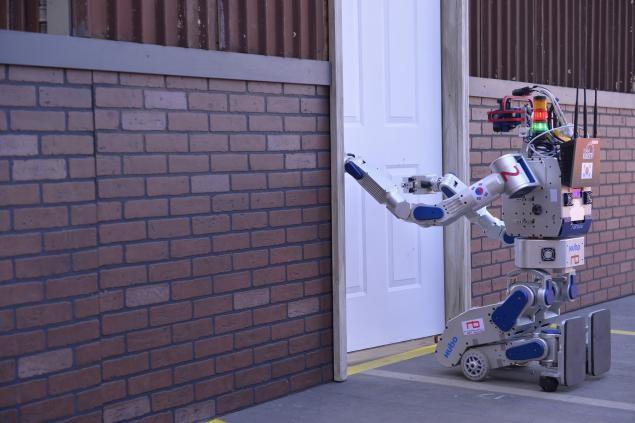
3. Ajuste de la puerta.
A diferencia de otros robots, que iban a ser (y mantener el equilibrio sobre dos piernas), para llevar a cabo esta tarea, DRC-HUBO podría pararse sobre sus rodillas, girando la manija de la puerta. Hábilmente utiliza la otra mano para mantener la puerta abierta hasta que gira la perilla. En menos de 2 minutos, pasó por la puerta.
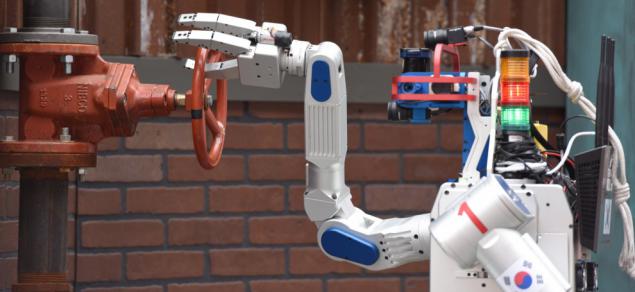
4. Configuración de una válvula.
Tenga en cuenta que al comienzo de la lidar vídeo se mueve hacia arriba y hacia abajo para permitir que los operadores escanean el área delante del robot. Entonces, cuando DRC-HUBO para cerrar la válvula, se vuelve superior de su cuerpo 180 grados. Preste atención a sus movimientos en el doce y veinte, porque es posible que no se dé cuenta (el ángulo de disparo no muestra la parte inferior del cuerpo del robot, por desgracia). En esta posición, aún de rodillas, el robot puede levantar el cuerpo por lo que es más fácil para hacer frente al perno (¿por qué estar de pie si no es necesario?). El robot explora el área utilizando lidar, determina la posición y después de 3 minutos realiza la tarea. Tenga en cuenta que falta un único turno, pero DRC-HUBO hizo dos vueltas completas! En 2:01 se puede ver cómo el robot "retornos" de SARS en la posición normal.
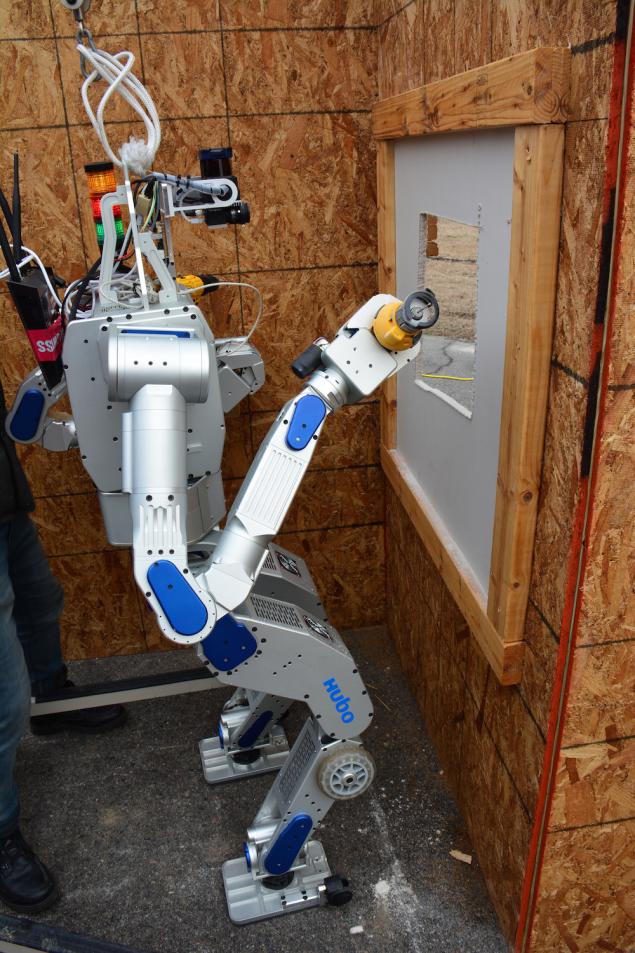
5. Especifique la pared.
Fue una tarea difícil para la mayoría de los equipos, ya que el robot tenía que mantener un taladro y pulse el botón incl. / Off. Para utilizar el dispositivo. < DRC-HUBO para aplicar los sensores de fuerza de torsión en cada mano, para captar mejor el instrumento. Usted puede ver cómo el robot se mueve e incluso mueve el taladro en el estante (golpeando otra perforación en el camino), con el fin de mejor aprovecharla. Cuando el robot se las arregla para capturar operadores de herramientas muestran lugar para la perforación, y el resto del robot realiza a sí mismo. Emplea a 20 Newtons de fuerza de empuje, y se puede ver la forma en que utiliza su cuerpo para mover el círculo perfecto de perforación. El trabajo toma 11 minutos del robot.
6. Ajuste sorpresa.
Esta tarea consistió en tirar del enchufe y la inserta en una toma diferente. Observe cómo el DRC-HUBO escanea el suelo y observe que el taladro, rechazó la compra anterior, está en camino. El robot se vuelve y mueve las rodillas de herramientas. Luego se trata de dar la vuelta y parece como si él golpeó la pared. Operadores notan claramente el problema, deja un poco por delante y luego se puede dar la vuelta. Por último, el robot se acerca a la toma de corriente, que se fija más alta que la manija de la puerta y el pestillo. Es hora de levantarse, y se puede ver que, dado que la marca 3:05. < DRC-HUBO da unos pasos hacia adelante y después de un tiempo comienza el trabajo. Él agarra el enchufe en el cable; creemos que la intención era que los operadores mejor pueden considerar el tenedor y el brazo robot no le está eclipsados que haría el trabajo imposible. Por el momento se puede ver alrededor de las 07:47, el robot intenta insertar el enchufe y la toma cerca de fallos. Después de algunos movimientos correctivos, el trabajo está hecho! Se tardó 13 minutos y 30 segundos -. Más que todos los otros trabajos
7. Configuración de promoción a través de los escombros.
< DRC-HUBO puede mover las rodillas hacia delante o girar 180 grados hacia el torso y las piernas van hacia adelante, actuando como una cuchilla niveladora. Y eso es lo que hace para hacer el trabajo. Usted puede ver cómo se convierte el cuerpo en torno a doce y veintiocho. Se ve bien. El robot levanta sus manos - probablemente para que no se ensucie la basura. Entonces comienza a moverse a través de los escombros. Se detiene por un segundo cuando parece como si un pedazo de madera pegado en un bloque de cemento, por lo que resulta un poco hacia la izquierda para quitarlo del camino. Empuja el tubo de plástico a la derecha. Alrededor de las 04:14 se vuelve el torso de nuevo y vuelve pasos opuestos. El trabajo toma menos de 5 minutos.
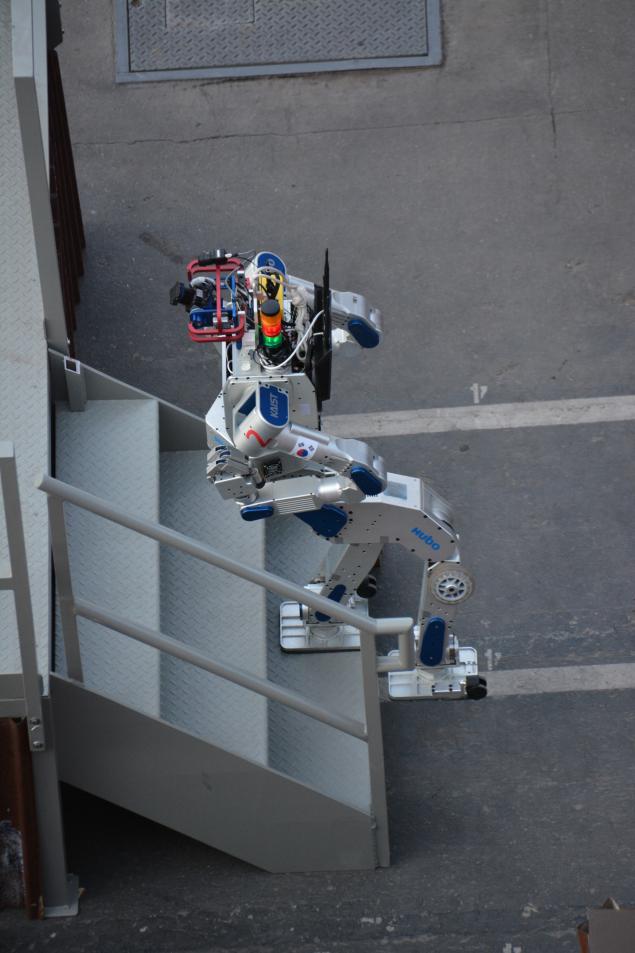
8. Configuración de pasos.
Sobre el profesor dijo que para muchas tareas, especialmente elevar las escaleras, es importante que el robot podía ver sus piernas. El gran tipo robot ATLAS difícilmente pueden hacerlo, tienen que doblar el cuerpo, lo que hace difícil acto de equilibrio. < DRC-HUBO resuelve este problema de manera muy inteligente. Él sube las escaleras al revés! Así rodillas no bloquean la cámara y se puede ver a sus pies y el suelo. Pero, ¿cómo se puede ver a sus pies cuando levantó hacia atrás? Turning Torso, por supuesto! Usted puede ver todo el proceso, comenzando con una marca de doce y veintiséis. Robot se arrodilla ante las escaleras, y de repente se volvió hacia ella. Entonces él se levanta a las doce y cincuenta y cinco minutos, y verás cómo resulta torso 180 grados. Ahora puede escanear y comenzar a subir las escaleras. Pero tenga en cuenta que antes de que él da dos pasos hacia un lado, hacia la izquierda (01:45)! Después de un par de minutos - lo que pareció una eternidad para el público - el robot está finalmente empezando a subir, superando el último tres pasos uno tras otro. Claramente! En menos de 7 minutos DRC-HUBO es en la plataforma. En el video, no hay sonido, pero en este momento, el equipo y el público estalló en aplausos.
< KAIST hizo cuatro copias DRC-HUBO y practicadas sin ataduras más de un mes antes de la competición. Ellos están capacitados en la calle, en un estacionamiento con una superficie rugosa y en diferentes condiciones climáticas, incluyendo la luz solar y el viento. "Si no nos quitamos la seguridad de los operadores de cable tendrán miedo", - dijo el profesor de la clase magistral después del evento
.
Agregó que durante el entrenamiento que realizan todas las tareas en ambos modos - de pie y de rodillas (el tiempo medio fue de 30 minutos). El equipo bueno en la limpieza de las manos de escombros DRC-HUBO , que no pudieron demostrar el Finales República Democrática del Congo , y también son capaces de realizar tareas más complejas en la superficie que la que estuvo en el concurso.
Es una lástima que no pudimos mostrar toda la capacidad del robot en el concurso ... era demasiado fácil! - сказал Sobre el profesor , abajo del escenario a los aplausos.
Blockquote>
Fuente: geektimes.ru/company/robohunter/blog/251898/