Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
2450
0.6
2014-12-04
Роботы в медицине
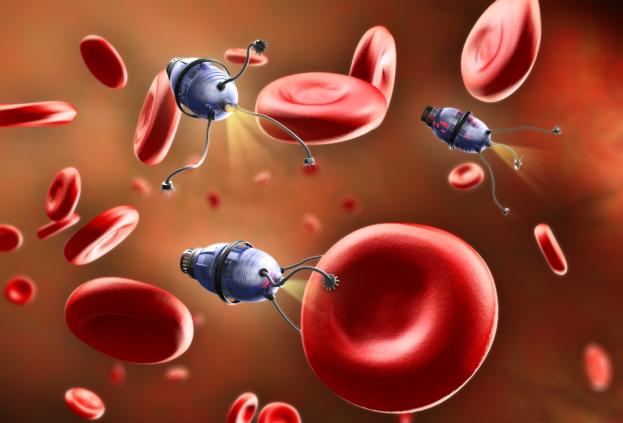
Сегодня исследовательские группы по всему миру пытаются нащупать концепцию использования роботов в медицине. Хотя правильнее, пожалуй, говорить «уже нащупали». Судя по количеству разработок и интересу всевозможных научных групп, можно утверждать о том, что магистральным направлением стало создание медицинских микророботов. Сюда же можно отнести и роботов с приставкой «нано-». Причём первые успехи в этой области были достигнуты сравнительно недавно, всего восемь лет назад.
В 2006 году группа исследователей под руководством Сильвана Мартеля впервые в мире провела успешный эксперимент, запустив крошечного робота размером с шарик от авторучки в сонную артерию живой свиньи. При этом робот перемещался по всем назначенным ему «путевым точкам». И за прошедшие с тех пор годы микроробототехника несколько продвинулась вперёд.
Одной из главных целей для инженеров сегодня является создание таких медицинских роботов, которые будут способны перемещаться не только по крупным артериям, но и по относительно узким кровеносным сосудам. Это позволило бы проводить сложные виды лечения без столь травматического хирургического вмешательства.
Но это далеко не единственное потенциальное преимущество микророботов. В первую очередь, они были бы полезны при лечении рака, целенаправленно доставляя лекарство прямо к злокачественному образованию. Ценность такой возможности сложно переоценить: при химиотерапии препараты подаются через капельницу, нанося сильнейший удар по всему организму. По сути, это сильный яд, который повреждает многие внутренние органы и, за компанию, саму опухоль. Это сравнимо с ковровой бомбардировкой ради уничтожения небольшой одиночной цели.
Задача создания подобных микророботов находится на стыке целого ряда научных дисциплин. Например, с точки зрения физики — как заставить столь малый объект самостоятельно двигаться в вязкой жидкости, которой для него является кровь? С точки зрения инженерии — как обеспечить робота энергией и как отслеживать перемещение по организму крохотного объекта? С точки зрения биологии — какие использовать материалы для изготовления роботов, чтобы они не наносили вреда организму человека? А в идеале, роботы должны быть биоразлагаемыми, чтобы не пришлось ещё решать проблему их вывода из организма.
Одним из примеров того, как микророботы могут «загрязнять» тело пациента, является «биоракета».
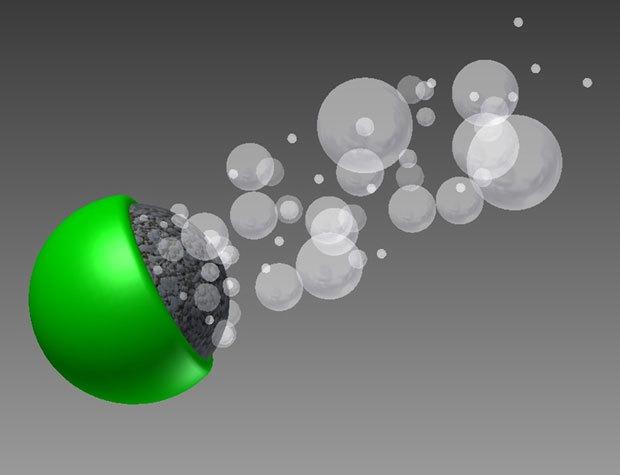
Этот вариант микроробота представляет собой титановое ядро, окружённое оболочкой из алюминия. Диаметр робота 20 мкм. Алюминий вступает в реакцию с водой, в ходе которой на поверхности оболочки формируются пузырьки водорода, которые толкают всю конструкцию. В воде такая «биоракета» проплывает за одну секунду расстояние, равное 150 своим диаметрам. Это можно сравнить с человеком двухметрового роста, который за секунду проплывает 300 метров, 12 бассейнов. Работает такой химический двигатель около 5 минут благодаря добавке галлия, уменьшающего интенсивность образования оксидной плёнки. То есть максимальный запас хода составляет около 900 мм в воде. Направление движению задаётся роботу внешним магнитным полем, а использовать его можно для точечной доставки лекарств. Но только после иссякания «заряда», в пациенте окажется россыпь микрошариков с алюминиевой оболочкой, который отнюдь не благотворно влияет на организм человека, в отличие от биологически нейтрального титана.
Микророботы должны быть так малы, что просто масштабировать до нужного размера традиционные технологии не получится. Никаких стандартных деталей подходящего размера тоже не производят. А даже если бы и производили, они бы просто не подошли для таких специфических нужд. И потому исследователи, как это уже много раз было в истории изобретений, ищут вдохновения у природы. Например, у тех же бактерий. На микро, и тем более наноуровне действуют совсем другие физические законы. В частности, вода является очень вязкой жидкость. Поэтому нужно применять другие инженерные решения для обеспечения движения микророботов. Бактерии эту задачу зачастую решают с помощью ресничек.
В начале этого года группа исследователей из Университета Торонто создала прототип микроробота длиной в 1 мм, управляемого внешним магнитным полем и оснащённого двумя захватами. Разработчикам удалось с его помощью построить мост. Также этот робот может использоваться не только для доставки лекарств, но и для механического восстановления тканей в кровеносной системе и органах.
Мускульные роботы
Ещё одно интересное направление в микроробототехнике — роботы, приводимые в движение мускулами. Например, есть такой проект: стимулируемая электричеством мышечная клетка, к которой прикреплён робот, чей «хребет» сделан из гидрогеля.Эта система, по сути, копирует природное решение, встречающееся в организмах многих млекопитающих. Например, в теле человека сокращение мышц передаётся костям через сухожилия. В данном биороботе, когда клетка сокращается под действием электричества, то «хребет» сгибается и поперечные перекладины, выполняющие роль ног, притягиваются друг к другу. Если одна из них при сгибании «хребта» перемещается на меньшее расстояние, то робот движется по направлению к этой «ноге».
Есть и другое видение, какими должны быть медицинские микророботы: мягкими, повторяющими формы различных живых существ. Например, вот такая робо-пчела (RoboBee).

Правда, она предназначена не для медицинских целей, а для целого ряда других: опыления растений, поисково-спасательных операций, обнаружения ядовитых веществ. Авторы проекта, конечно, не копируют слепо анатомические особенности пчелы. Вместо этого они внимательно анализируют всевозможные «конструкции» организмов различных насекомых, адаптируя и воплощая их в механике.
Или другой пример использования имеющихся в природе «конструкций» — микроробот в виде двустворчатого моллюска. Движется он с помощью хлопанья «створок», создавая тем самым реактивную струю. При размере около 1 мм он может плавать внутри человеческого глазного яблока. Как и большинство других медицинских роботов, этот «моллюск» в качестве источника энергии использует внешнее магнитное поле. Но есть важное отличие — он лишь получает энергию для движения, само поле его не двигает, в отличие от большинства других видов микророботов.
Большие роботы
Конечно, одними лишь микророботами парк медицинской техники не ограничивается. В фантастических фильмах и книгах медицинские роботы обычно представляются в виде замены хирурга-человека. Мол, это некое крупное устройство, которое быстро и очень точно производится всевозможные хирургические манипуляции. И не удивительно, что эта идея была реализована одной из первых. Конечно, современные хирургические роботы не способны заменить человека целиком, но зашивание им уже вполне доверяют. Также они используются в качестве продолжения рук хирурга, как манипуляторы.Однако в медицинской среде не утихают споры относительно целесообразности использования таких машин. Многие специалисты придерживаются мнения, что особых выгод такие роботы не дают, а благодаря своей высокой цене существенно увеличивают стоимость медицинских услуг. С другой стороны, есть исследование, согласно которому пациентам с раком простаты, подвергавшимся хирургической операции с роботом-ассистентом, в дальнейшем требуется менее интенсивное применение гормональных средств и радиотерапии. В общем, неудивительно, что усилия многих учёных оказались направлены на создание микророботов.
Интересным проектом является Робонавт (Robonaut), телемедицинский робот, предназначенный для оказания помощи космонавтам. Это пока экспериментальный проект, но такой подход может быть использован не только для оказания таким важным и дорогим в подготовке людям, как космонавты. Телемедицинские роботы могут быть использованы и для оказания помощи в различных труднодоступных районах. Конечно, это будет целесообразно только в том случае, если дешевле будет установить в лазарете какого-нибудь глухого таёжного или горного посёлка робота, чем держать фельдшера на зарплате.
А этот медицинский робот ещё более узкоспециализирован, он используется для лечения облысения. ARTAS занимается автоматическим «выкапыванием» волосяных фолликул из кожи головы пациента, основываясь на фотографиях высокого разрешения. Потом врач-человек вручную внедряет «урожай» в облысевшие участки.

Всё-таки мир медицинских роботов вовсе не так однообразен, как может показаться неискушённому человеку. Более того, он активно развивается, идёт накопление идей, результатов экспериментов, ищутся наиболее эффективные подходы. И кто знает, возможно, ещё при нашей жизни слово «хирург» будет означать врача не со скальпелем, а с баночкой микророботов, которых достаточно будет проглотить или внедрить через капельницу.
Источник: geektimes.ru/company/asus/blog/242432/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.