786
Aviones Digital
a través Shvonder
Argumentaron que los viejos aviones más seguros hoy porque contienen menos electrónica. Por ejemplo, A-320, voy a tratar de explicar cómo asegurar y modernos aviones "computadora".
¿Qué es «Fly-by-wire»?
En los albores de la aviación de control de la aeronave se llevó a cabo mecánicamente - con la ayuda de cuerdas y bielas los controles (volante y los pedales) con alerones y timones napravlyaniya y altura
. A medida que el tamaño y la velocidad de la aeronave crecieron y esfuerzo físico requerido para administrar el piloto. Para ayudar a la gente vino mecanismos de refuerzo (actuadores hidráulicos). A pesar de que facilitan el trabajo del piloto, la gestión está siendo llevada a cabo cables y varillas. La fiabilidad de este tipo de sistemas de control proporciona redundancia varillas, cables y actuadores.
Ambos esquemas de control - y el refuerzo mecánico - y todavía se utilizan como una avioneta, y para grandes aviones, incluyendo en el SR-71 y AN-225 "Mriya».
En los mediados de los años 50 para aviones militares desarrollaron nuevos, llamados estáticamente inestable diseño aerodinámico, lo que permite un aumento significativo en la maniobrabilidad, pero no permiten hacer el vuelo sin corrección constante. Era necesario para defenderse de las perturbaciones emergentes más rápido que se desarrollan. Debido a la baja velocidad de reacción de una persona que no era capaz de resolver este problema y para controlar de forma estática de aeronaves inestable fue desarrollado por el sistema de control de alambre (o FBWCS Fly-by-wire, FBW). Sobre la base de los datos recibidos desde los sensores y controles, FBWCS en forma de señales de servo para las superficies aerodinámicas (alerones y los timones). Es decir, un hombre corrió FBWCS y FBWCS volar un avión.
Primeros FBWCS eran analógico, y más tarde hubo digital. Ahora FBWCS utiliza en prácticamente todos los aviones de combate y participa en la aviación civil. Pero en la aviación civil, no son con el propósito de svehmanevrennosti
Tenga en cuenta la aplicación del concepto de Fly-by-Wire como un ejemplo de la aeronave A-320.

Si nos fijamos en el A320 de cabina, en lugar de volantes encontrar palancas de mando (en la terminología Airbus- saydstika) en las consolas laterales. Cada saydstik equipados con medidores de tensión cuyos datos son procesados por computadora y dada la situación actual se transmite a los actuadores.
A320 tiene un ordenador de control de vuelo 7-2 ordenador ELAC (Ascensor Aileron Computer), 3 ordenadores SEC (Spoilers Ascensor Informática) 2 ordenador FAC (Vuelo Aumento Informática)
.
anticipando preguntas sobre el "hardware" - ordenadores ELAC se ejecutan en el procesador Motorola 68000, SEC - INTEL 80186. smile.gif
Cada uno de estos equipos tiene 2 módulos - Unidad de Control y la Unidad de Seguimiento. De hecho, es de 2 dispositivos independientes para recibir y procesar los mismos datos. Pero si la Unidad de Monitoreo detecta una discrepancia entre los resultados de nuestros cálculos con los resultados de la Unidad de Control de cálculos, a continuación, el equipo se considera que es defectuoso y sus funciones a manos de su "socio". Para evitar posibles errores, la unidad de control de software y monitoreo Unidad desarrollado equipos razymi de programadores en diferentes idiomas. *
Incluso en el caso de par completo fracaso, los otros pares pueden llevar a cabo su función. Así, por ejemplo, el ajuste del estabilizador se encuentra con el ELAC2 ordenador. En caso de fallo, cuenta ELAC2 capaz de asumir ELAC1, entonces SEC1, entonces SEC2. Es decir, además de trabajar en bloques idénticos paralelos allí y la duplicación de funciones entre las diferentes unidades. Esto proporciona múltiples sistemas de control de vuelo redundante.
Cada equipo tiene una función de autodiagnóstico en los siguientes parámetros - procesador de control (watchdog y sumas de comprobación), el poder de control, entradas y salidas de control, control de retroalimentación. Diagnóstico aportaciones mediante la comparación de señales idénticas recibido de los diferentes dispositivos.
Hay varios niveles - modos de ordenadores de control de vuelo, lo que en la terminología de Airbus llaman "leyes"
.
El primer modo - LEY NORMAL. Este modo es el principal y más frecuentemente utilizado. La aeronave estará sujeta al piloto, pero no superará los valores críticos del ángulo de ataque, sobrecarga, cabeceo y balanceo y también controlar la velocidad, no permitiendo el movimiento limita las velocidades máximas y mínimas para el modo de vuelo actual. Este modo se mantiene en funcionamiento en caso de fallo de cualquiera de los 7 equipos.
En caso de negativa de varios ordenadores activar el segundo modo - LEY ALTERNOS. En este modo persiste protección de sobrecarga crítico, así como contra pérdida o exceso de velocidad.
Cuando el modo de falla en la computadora múltiple se activa tretity - LEY DIRECTO. En este modo, las señales de saydstika no procesados y alimentan directamente a los servos.
En el caso de fallo completo de todo el equipo de control de vuelo 7, A-320 tiene un sistema de copia de seguridad hidromecánicos al tipo y tono.
Y en conclusión. En la historia del accidente A-320 fue culpa del equipo de una sola vez -. En 1988, después de lo cual todas las aeronaves han sido finalizado
Por el momento, se lanzó alrededor 5.000 aviones de esta familia.
Los ingenieros de Boeing aún más grave.
En cada uno de los tres sistemas informáticos Fly-by-Wire avión Boeing-777 con el fin de evitar errores de los tres procesadores de diferentes fabricantes - Intel 80486, Motorola 68040 y AMD 29050. Todos ellos realizan la misma tarea. Software escrito en ADA. Sin embargo, cada procesador necesita su propio asiento y el compilador, que también aumenta la fiabilidad del sistema en general. Al identificar las diferencias en los resultados de la computadora está apagada. Boeing llama el esquema de «arquitectura redundante triple de triple».
Y ahora un pequeño repaso del desarrollo nacional -. El control remoto de la CDS-10 mK
De 2007 a 2009 trabajé en el fabricante de productos electrónicos (Elara, Cheboksary), ingeniero principal en este producto. Escribo sobre todo de memoria, tal como se emplea actualmente en otros lugares y el acceso a la documentación técnica no tener. Hubo sólo un resumen. Este producto no es un secreto.
CDS-10 mK (CDS-10 mK Ser 2.) - 4 veces sistema redundante de analógico a digital de control de la aeronave en sentido longitudinal, transversal y el seguimiento de los canales. El sistema reemplaza el cableado de control mecánico. Este sistema está instalado en el Su-30MK ... (sobre todo para los de la Fuerza Aérea de la India) Partes
2 fuente de alimentación dual. Fuente de alimentación de los CDS a partir de dos fuentes independientes de tensión continua nominal 27V, que operan en las baterías tampón y dos de tres fases de tensión alterna de 115 V Frecuencia de 400 Hz independiente. Resiste los transitorios de corriente continua de 50 voltios. CDS - Sistema de apoyo a la vida. El avión cayó simplemente si el CDS niegan
Los evaluadores. Combinado en varios bloques y un armario. En total, consta de 60 módulos (leer - tarjetas de circuitos impresos). Produce el procesamiento de señales de sensores y señales de salida a los mecanismos de dirección ejecutiva. Los evaluadores trabajan simultáneamente y forman un medio resultante señales. El sistema continúa funcionando con dos fallos independientes en diferentes canales de calculadoras. Es decir, en caso de fallo en una de sus salidas calculadoras comienzan a diferir de las señales de otras calculadoras. Exceder (menospreciar) el umbral especificado, la calculadora se apaga y una señal de que el informante de voz, y el panel de control. Usted puede tratar de reiniciar el panel de control. Si las señales de varios fallos, no se convierte comparan con nada y el sistema entra en una conexión rígida (en este modo de control del combate es casi imposible, ya que es diseño aerodinámico desequilibrada y constantemente lleva). Ni un solo fallo relacionado con el desastre de la CDS-10 mK no lo era. El accidente fue uno de esos.
Sensores. Convertir varios parámetros físicos en vuelo señales eléctricas. Los sensores en los CDS son completamente independientes de otros sistemas. Es decir, por ejemplo, el sistema de navegación (PNA) y los CDS tienen una funcionalidad similar para los sensores. Todos los sensores de 4x duplican. CDS "elimina" los vuelos siguientes parámetros:
- La presión estática y dinámica (DBP, DDD - sensor de presión absoluta, sensor de presión diferencial) para medir la velocidad y la altitud. Estos parámetros tienen que saber, porque a diferentes altitudes diferente densidad del aire, y en diferentes velocidades, diferentes de resistencia
- Velocidad angular (CRS, REM - un sensor de velocidad angular, la unidad de sensor de giro). Requerido para la determinación de la velocidad angular de rotación alrededor de sus ejes. CDS devuelve inmediatamente a la aeronave a su posición original para cualquier
planeador desviación - La posición de la palanca de control y pedales (DPR - codificador redundante). Estos sensores se convierten en una perilla de control de la posición de la señal eléctrica en dos planos (balance, cabeceo) y pedales (por supuesto)
Juntas. PP, PU - verificación remota, control remoto. Diseñado para un rendimiento de pruebas de los CDS y los CDS controlan durante la operación, así como para monitorear el desempeño y reinicie durante
vuelo La máquina de dirección. Diseñado para convertir señales eléctricas en CDS mecánicos. Señales mecánicas pre-amplificadas máquinas hidráulicas que forman parte de los CDS no incluye modos

CDS opera en varios modos: despegue y el aterrizaje, reabastecimiento en vuelo. Modos difieren principalmente coeficiente de transferencia y el funcionamiento de superficie deflectora individual. Por ejemplo, en el "reabastecimiento" el avión se está moviendo mucho más suave que en el "vuelo". Durante el vuelo, el sistema supervisa continuamente la posición del plano en el espacio, la velocidad y dirección del vuelo y gestiona flaperones, calcetines, canards, timones y la altura y el ángulo de desviación de las boquillas en el plano vertical.
El sistema cuenta con paradas de limitar las condiciones no permiten al piloto para que la aeronave más allá de sus capacidades. Al acercarse al piloto regímenes límite pluma comienza a temblar fuertemente, como si un avión se cae a pedazos en este momento, pero en realidad se trata de una imitación.
Tecnología de producción y control de calidad
El sistema ha sido aplicado en su totalidad en la base doméstico elemento. El fabricante tiene su propio taller mecánico, un taller para la fabricación de placas de circuito impreso, planta microelectrónica. El sistema no está sellado. Todas las placas de circuitos impresos tienen una barrera contra la humedad en forma de 3 capas de barniz. Particularmente compuesto sensible está recubierto bordo. Estructuras de apoyo se fabrican en máquinas CNC.
La calidad está controlada en todas las etapas de talleres de producción propios, OTC y establecimiento militar. Prueba de Producto Informe comparable con la revista 96 hoja. Después de la fabricación de prueba del sistema acerca de 2 semanas.
Otros
El sistema toma las pruebas más severas, y en mi opinión, es el producto electrónico más tenaz en un avión. Su experiencia en temperaturas -60..60 grados durante horas agitando en una mesa vibratoria, sales contaminantes, arena, pares de setas. Su peso es de alrededor de 120 kg sistema. y muy caro, pero es un secreto comercial del fabricante.
Actualmente desarrollamos un moderno contrapartes digitales (por ejemplo, la SIC-35), pero todavía se producen y utilizan el CDS-10 mK éxito.
En la Figura 3 - Fuente de alimentación BP-58 de la SDU-10U, C (GC-27) después de las pruebas a baja temperatura. Se trata de un sistema más antiguo que también está siendo producido.
Fuente:
Argumentaron que los viejos aviones más seguros hoy porque contienen menos electrónica. Por ejemplo, A-320, voy a tratar de explicar cómo asegurar y modernos aviones "computadora".
¿Qué es «Fly-by-wire»?
En los albores de la aviación de control de la aeronave se llevó a cabo mecánicamente - con la ayuda de cuerdas y bielas los controles (volante y los pedales) con alerones y timones napravlyaniya y altura
. A medida que el tamaño y la velocidad de la aeronave crecieron y esfuerzo físico requerido para administrar el piloto. Para ayudar a la gente vino mecanismos de refuerzo (actuadores hidráulicos). A pesar de que facilitan el trabajo del piloto, la gestión está siendo llevada a cabo cables y varillas. La fiabilidad de este tipo de sistemas de control proporciona redundancia varillas, cables y actuadores.
Ambos esquemas de control - y el refuerzo mecánico - y todavía se utilizan como una avioneta, y para grandes aviones, incluyendo en el SR-71 y AN-225 "Mriya».
En los mediados de los años 50 para aviones militares desarrollaron nuevos, llamados estáticamente inestable diseño aerodinámico, lo que permite un aumento significativo en la maniobrabilidad, pero no permiten hacer el vuelo sin corrección constante. Era necesario para defenderse de las perturbaciones emergentes más rápido que se desarrollan. Debido a la baja velocidad de reacción de una persona que no era capaz de resolver este problema y para controlar de forma estática de aeronaves inestable fue desarrollado por el sistema de control de alambre (o FBWCS Fly-by-wire, FBW). Sobre la base de los datos recibidos desde los sensores y controles, FBWCS en forma de señales de servo para las superficies aerodinámicas (alerones y los timones). Es decir, un hombre corrió FBWCS y FBWCS volar un avión.
Primeros FBWCS eran analógico, y más tarde hubo digital. Ahora FBWCS utiliza en prácticamente todos los aviones de combate y participa en la aviación civil. Pero en la aviación civil, no son con el propósito de svehmanevrennosti
Tenga en cuenta la aplicación del concepto de Fly-by-Wire como un ejemplo de la aeronave A-320.

Si nos fijamos en el A320 de cabina, en lugar de volantes encontrar palancas de mando (en la terminología Airbus- saydstika) en las consolas laterales. Cada saydstik equipados con medidores de tensión cuyos datos son procesados por computadora y dada la situación actual se transmite a los actuadores.
A320 tiene un ordenador de control de vuelo 7-2 ordenador ELAC (Ascensor Aileron Computer), 3 ordenadores SEC (Spoilers Ascensor Informática) 2 ordenador FAC (Vuelo Aumento Informática)
.
anticipando preguntas sobre el "hardware" - ordenadores ELAC se ejecutan en el procesador Motorola 68000, SEC - INTEL 80186. smile.gif
Cada uno de estos equipos tiene 2 módulos - Unidad de Control y la Unidad de Seguimiento. De hecho, es de 2 dispositivos independientes para recibir y procesar los mismos datos. Pero si la Unidad de Monitoreo detecta una discrepancia entre los resultados de nuestros cálculos con los resultados de la Unidad de Control de cálculos, a continuación, el equipo se considera que es defectuoso y sus funciones a manos de su "socio". Para evitar posibles errores, la unidad de control de software y monitoreo Unidad desarrollado equipos razymi de programadores en diferentes idiomas. *
Incluso en el caso de par completo fracaso, los otros pares pueden llevar a cabo su función. Así, por ejemplo, el ajuste del estabilizador se encuentra con el ELAC2 ordenador. En caso de fallo, cuenta ELAC2 capaz de asumir ELAC1, entonces SEC1, entonces SEC2. Es decir, además de trabajar en bloques idénticos paralelos allí y la duplicación de funciones entre las diferentes unidades. Esto proporciona múltiples sistemas de control de vuelo redundante.
Cada equipo tiene una función de autodiagnóstico en los siguientes parámetros - procesador de control (watchdog y sumas de comprobación), el poder de control, entradas y salidas de control, control de retroalimentación. Diagnóstico aportaciones mediante la comparación de señales idénticas recibido de los diferentes dispositivos.
Hay varios niveles - modos de ordenadores de control de vuelo, lo que en la terminología de Airbus llaman "leyes"
.
El primer modo - LEY NORMAL. Este modo es el principal y más frecuentemente utilizado. La aeronave estará sujeta al piloto, pero no superará los valores críticos del ángulo de ataque, sobrecarga, cabeceo y balanceo y también controlar la velocidad, no permitiendo el movimiento limita las velocidades máximas y mínimas para el modo de vuelo actual. Este modo se mantiene en funcionamiento en caso de fallo de cualquiera de los 7 equipos.
En caso de negativa de varios ordenadores activar el segundo modo - LEY ALTERNOS. En este modo persiste protección de sobrecarga crítico, así como contra pérdida o exceso de velocidad.
Cuando el modo de falla en la computadora múltiple se activa tretity - LEY DIRECTO. En este modo, las señales de saydstika no procesados y alimentan directamente a los servos.
En el caso de fallo completo de todo el equipo de control de vuelo 7, A-320 tiene un sistema de copia de seguridad hidromecánicos al tipo y tono.
Y en conclusión. En la historia del accidente A-320 fue culpa del equipo de una sola vez -. En 1988, después de lo cual todas las aeronaves han sido finalizado
Por el momento, se lanzó alrededor 5.000 aviones de esta familia.
Los ingenieros de Boeing aún más grave.
En cada uno de los tres sistemas informáticos Fly-by-Wire avión Boeing-777 con el fin de evitar errores de los tres procesadores de diferentes fabricantes - Intel 80486, Motorola 68040 y AMD 29050. Todos ellos realizan la misma tarea. Software escrito en ADA. Sin embargo, cada procesador necesita su propio asiento y el compilador, que también aumenta la fiabilidad del sistema en general. Al identificar las diferencias en los resultados de la computadora está apagada. Boeing llama el esquema de «arquitectura redundante triple de triple».
Y ahora un pequeño repaso del desarrollo nacional -. El control remoto de la CDS-10 mK

De 2007 a 2009 trabajé en el fabricante de productos electrónicos (Elara, Cheboksary), ingeniero principal en este producto. Escribo sobre todo de memoria, tal como se emplea actualmente en otros lugares y el acceso a la documentación técnica no tener. Hubo sólo un resumen. Este producto no es un secreto.
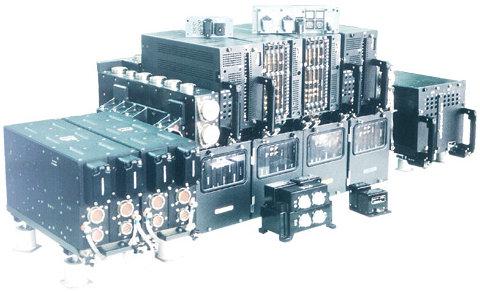
CDS-10 mK (CDS-10 mK Ser 2.) - 4 veces sistema redundante de analógico a digital de control de la aeronave en sentido longitudinal, transversal y el seguimiento de los canales. El sistema reemplaza el cableado de control mecánico. Este sistema está instalado en el Su-30MK ... (sobre todo para los de la Fuerza Aérea de la India) Partes
2 fuente de alimentación dual. Fuente de alimentación de los CDS a partir de dos fuentes independientes de tensión continua nominal 27V, que operan en las baterías tampón y dos de tres fases de tensión alterna de 115 V Frecuencia de 400 Hz independiente. Resiste los transitorios de corriente continua de 50 voltios. CDS - Sistema de apoyo a la vida. El avión cayó simplemente si el CDS niegan
Los evaluadores. Combinado en varios bloques y un armario. En total, consta de 60 módulos (leer - tarjetas de circuitos impresos). Produce el procesamiento de señales de sensores y señales de salida a los mecanismos de dirección ejecutiva. Los evaluadores trabajan simultáneamente y forman un medio resultante señales. El sistema continúa funcionando con dos fallos independientes en diferentes canales de calculadoras. Es decir, en caso de fallo en una de sus salidas calculadoras comienzan a diferir de las señales de otras calculadoras. Exceder (menospreciar) el umbral especificado, la calculadora se apaga y una señal de que el informante de voz, y el panel de control. Usted puede tratar de reiniciar el panel de control. Si las señales de varios fallos, no se convierte comparan con nada y el sistema entra en una conexión rígida (en este modo de control del combate es casi imposible, ya que es diseño aerodinámico desequilibrada y constantemente lleva). Ni un solo fallo relacionado con el desastre de la CDS-10 mK no lo era. El accidente fue uno de esos.
Sensores. Convertir varios parámetros físicos en vuelo señales eléctricas. Los sensores en los CDS son completamente independientes de otros sistemas. Es decir, por ejemplo, el sistema de navegación (PNA) y los CDS tienen una funcionalidad similar para los sensores. Todos los sensores de 4x duplican. CDS "elimina" los vuelos siguientes parámetros:
- La presión estática y dinámica (DBP, DDD - sensor de presión absoluta, sensor de presión diferencial) para medir la velocidad y la altitud. Estos parámetros tienen que saber, porque a diferentes altitudes diferente densidad del aire, y en diferentes velocidades, diferentes de resistencia
- Velocidad angular (CRS, REM - un sensor de velocidad angular, la unidad de sensor de giro). Requerido para la determinación de la velocidad angular de rotación alrededor de sus ejes. CDS devuelve inmediatamente a la aeronave a su posición original para cualquier
planeador desviación - La posición de la palanca de control y pedales (DPR - codificador redundante). Estos sensores se convierten en una perilla de control de la posición de la señal eléctrica en dos planos (balance, cabeceo) y pedales (por supuesto)
Juntas. PP, PU - verificación remota, control remoto. Diseñado para un rendimiento de pruebas de los CDS y los CDS controlan durante la operación, así como para monitorear el desempeño y reinicie durante
vuelo La máquina de dirección. Diseñado para convertir señales eléctricas en CDS mecánicos. Señales mecánicas pre-amplificadas máquinas hidráulicas que forman parte de los CDS no incluye modos

CDS opera en varios modos: despegue y el aterrizaje, reabastecimiento en vuelo. Modos difieren principalmente coeficiente de transferencia y el funcionamiento de superficie deflectora individual. Por ejemplo, en el "reabastecimiento" el avión se está moviendo mucho más suave que en el "vuelo". Durante el vuelo, el sistema supervisa continuamente la posición del plano en el espacio, la velocidad y dirección del vuelo y gestiona flaperones, calcetines, canards, timones y la altura y el ángulo de desviación de las boquillas en el plano vertical.
El sistema cuenta con paradas de limitar las condiciones no permiten al piloto para que la aeronave más allá de sus capacidades. Al acercarse al piloto regímenes límite pluma comienza a temblar fuertemente, como si un avión se cae a pedazos en este momento, pero en realidad se trata de una imitación.
Tecnología de producción y control de calidad
El sistema ha sido aplicado en su totalidad en la base doméstico elemento. El fabricante tiene su propio taller mecánico, un taller para la fabricación de placas de circuito impreso, planta microelectrónica. El sistema no está sellado. Todas las placas de circuitos impresos tienen una barrera contra la humedad en forma de 3 capas de barniz. Particularmente compuesto sensible está recubierto bordo. Estructuras de apoyo se fabrican en máquinas CNC.
La calidad está controlada en todas las etapas de talleres de producción propios, OTC y establecimiento militar. Prueba de Producto Informe comparable con la revista 96 hoja. Después de la fabricación de prueba del sistema acerca de 2 semanas.
Otros
El sistema toma las pruebas más severas, y en mi opinión, es el producto electrónico más tenaz en un avión. Su experiencia en temperaturas -60..60 grados durante horas agitando en una mesa vibratoria, sales contaminantes, arena, pares de setas. Su peso es de alrededor de 120 kg sistema. y muy caro, pero es un secreto comercial del fabricante.
Actualmente desarrollamos un moderno contrapartes digitales (por ejemplo, la SIC-35), pero todavía se producen y utilizan el CDS-10 mK éxito.
En la Figura 3 - Fuente de alimentación BP-58 de la SDU-10U, C (GC-27) después de las pruebas a baja temperatura. Se trata de un sistema más antiguo que también está siendo producido.
Fuente: