783
数字飞机
通过Shvonder
认为,旧的飞机更加安全的今天,因为它们含有较少的电子产品。例如,A-320,我将试图解释如何保护和现代的“电脑”的飞机。
什么是«飞行线控»?
在航空控制飞机的曙光进行了机械 - 用绳子和连接控制(方向盘和踏板),与副翼和方向舵napravlyaniya和高度棒的帮助下
。 由于飞机的尺寸和速度生长和所需的体力来管理导频。为了帮助人们来助力机构(液压驱动器)。虽然他们推进试点工作,管理层仍在进行电缆及杆。这种系统的可靠性提供了冗余控制杆,电缆和致动器。
既控制方案 - 和机械增压泵 - 和仍然被用作轻型飞机,并为大飞机,其中包括对SR-71和AN-225“Mriya»。
在50年代中期为军用飞机开发新的,所谓的静不稳定的气动布局,从而在机动性显著增加,但不允许进行未经常数改正飞行。这是必要的,以抵御新出现的扰动速度比他们的发展。由于人的反应速率低,他没能解决这个问题,并控制静态不稳定的飞机是通过有线控制系统(或FBWCS飞行线控,FBW)开发。来自传感器和控制接收的数据的基础上,FBWCS形伺服信号的空气动力学表面(副翼和方向舵)。也就是说,一个人跑到FBWCS和FBWCS驾驶飞机。
首先FBWCS是模拟的,后来有数字。现在用在FBWCS几乎所有的作战飞机和从事民用航空。但在民航,他们不是为svehmanevrennosti
的目的
考虑飞行线控概念的实现作为飞机A-320的一个例子。

如果你进入驾驶舱A320,而不是方向盘找到操纵杆(在术语Airbus- saydstika)就在身边游戏机。每个saydstik配备有应变仪,其由计算机进行处理,考虑到目前的情况被发送到致动器的数据。
A320拥有一个飞行控制计算机7 - 2计算机ELAC(电梯副翼计算机),3台电脑SEC(剧透电梯电脑)2计算机FAC(飞行增稳计算机)
。
预计有关“硬件”问题 - 关于摩托罗拉68000处理器上运行ELAC电脑,SEC - 英特尔80186. smile.gif
每台计算机都有2个模块 - 控制单元和监控单元。事实上,它是接收并处理相同的数据2独立的设备。但是,如果监视单元检测我们的计算与计算控制单元的结果的结果之间的差异,然后在计算机被认为是错误的,其职能交由他的“伴侣”。为了避免可能出现的错误,软件控制单元和不同语言的程序员监控单元开发razymi队。*
甚至在完全失效一对的情况下,其他对能够执行其功能。因此,例如,稳定剂镶边满足计算机ELAC2。在失败的情况下,功能ELAC2能够承担ELAC1,然后SEC1,然后SEC2。也就是说,除了在平行相同电路块和那里的不同单元之间的功能的重复工作。这提供了多重冗余的飞行控制系统。
每台计算机都有以下参数的自诊断功能 - 控制处理器(看门狗和校验),控制电源,输入输出控制,反馈控制。通过比较来自不同设备接收相同的信号,提供诊断的投入。
有几个层次 - 飞行控制计算机,这在空中客车的术语叫“法律”模式
第一种模式 - 正常规律。此模式是主要的和最常用的。飞机将受导频,但不会超过攻击,过载,俯仰和滚动角的临界值,并还将控制速度,而不是让移动限制了最大和最小的速度为当前飞行模式。此方式保持在操作的情况下的任何计算机7的故障。
在拒绝的情况下多台计算机的激活第二种模式 - 备用法则。在这种模式下持续保护的关键超载的,以及对丢失或超速。
当多台计算机的故障模式被激活tretity - 直接法则。在这种模式下,来自saydstika的信号不被处理,并直接馈送到伺服。
在所有的飞行控制计算机7完全失效的情况下,A-320具有流体力学备份系统在速率和音高。
和结束。在A-320飞机坠毁的历史是设备的故障只有一次 - 在1988年,之后所有飞机都已经敲定
目前,它发布了约5000架飞机这个家庭。
工程师在波音公司更加严峻。
在这三个计算机系统的飞行线控飞机波音777,以避免错误来自不同制造商的三款处理器 - 英特尔80486,摩托罗拉68040和AMD 29050.他们都执行相同的任务。编写的软件ADA。然而,每个处理器需要其自己的饰板和编译器,这也增加了整个系统的可靠性。在识别所述计算机的结果的差异是关闭的。波音公司称该计划«三重三重冗余架构»。
而现在国家发展了一点检讨 - 在CDS-10的MK遥控
2007至2009年我曾在电子产品制造商(卫七,切博克萨雷),对这款产品的首席工程师。我写的大多是从内存,因为目前其他地方采用,并获得技术文档都没有。世界上只有一个总结。该产品是不是一个秘密。
CDS-10 mK的(CDS-10 mK的丝氨酸2) - 该机在纵向,横向的4倍冗余模拟 - 数字控制系统和跟踪通道。该系统取代了机械式控制接线。该系统安装在苏-30MK ...(主要为印度空军)零部件
2双电源供电。从直流额定电压27V两个独立的来源,在缓冲电池供电和400Hz的的115V频率的两个独立的三相交流电压供电的CDS的。可承受瞬态直流至50伏。 CDS - 生命保障系统。这架飞机只是下降,如果CDS否认
评价者。组合成若干块和一个衣柜。总之,它由60模块(读 - 印刷电路板)。生产加工来自传感器的输出信号的信号来执行转向齿轮。评估人员同时工作,并形成产生信号的媒介。该系统将继续在不同的渠道计算器两个独立的失败操作。也就是,在失败的情况下在它的计算器输出中的一个开始从其他计算器的信号不同。超过(贬低)将指定的阈值时,计算器被关闭,信号到声音告发,和控制面板。你可以尝试重新启动控制面板。如果几个故障信号变得不与任何比较和系统进入一个刚性连接(在此模式下控制的战斗机几乎是不可能的,因为它是不平衡的空气动力学设计,不断引线)。不是CDS-10 mK的一次灾害相关的故障不是。这起事故是这样的。
传感器。各种物理参数转换成电信号的飞行。在CDS传感器是完全独立于其他系统。即,例如,导航系统(PNA)和在CDS有传感器类似的功能。所有传感器4X复制。 CDS“删除”飞行参数如下:
- 静态和动态压力(DBP,DDD - 绝对压力传感器,差压传感器),用于测量的速度和高度。这些参数需要知道的,因为在不同的高度不同密度的空气,并以不同的速度,不同电阻
- 角速度(CRS,REM - 角速度传感器,陀螺传感器单元)。需要用于确定围绕它们的轴线的角速度旋转。 CDS立即返回该飞机到原来的位置为任何偏差滑翔
- (DPR - 冗余编码器)控制杆和踏板的位置。这些传感器被转换成电信号的位置控制旋钮在两个平面(滚动,俯仰)和踏板(当然)
板。 PP,PU - 远程验证,远程控制。设计用于CDS的测试性能并且在飞行
操作期间以及用于监视性能CDS的控制,并重新启动 转向机。设计成将电信号转换成机械的CDS。机械信号预放大的液压机,它们是CDS部分不包括模式

CDS可以在几种模式:起飞和降落,空中加油。模式的不同主要是传递系数和单个偏转表面的操作。例如,在“加油”平面移动要比在“飞行”更加顺畅。在飞行期间,该系统连续地监视在空间飞行,速度和方向的面的位置,并管理襟副翼,袜子,鸭翼,舵和高度,并在垂直平面上的喷嘴的偏转角。
该系统具有停止限制条件不允许导频带上飞机超出其能力。当接近极限制度笔试点开始发抖的境地,仿佛一架飞机分崩离析的权利,但实际上它是一种模仿。
生产工艺和质量控制
该系统已在国内的基础元件得到全面落实。制造商有自己的机械车间,用于生产印刷电路板,微电子厂的车间。该系统是不密封。所有印刷电路板具有在3层的清漆的形式的湿气屏障。特别敏感的化合物涂布纸板。支撑结构的数控设备制造。
质量控制为生产车间的各个阶段本身,OTC和军事设施。产品检验报告有96片的杂志相媲美。经过生产系统测试2周左右。
其他
该系统采用最严峻的考验,而在我看来,是最顽强的电子产品在飞机上。她的经历在温度-60..60度,小时晃动在振动台上,污染严重的盐,沙,蘑菇对。它重约120千克系统。和非常昂贵的,但它是制造商的商业秘密。
目前我们开发了一个现代数字对应(例如,SIC-35),但在CDS-10 mK的静止生产和使用成功。
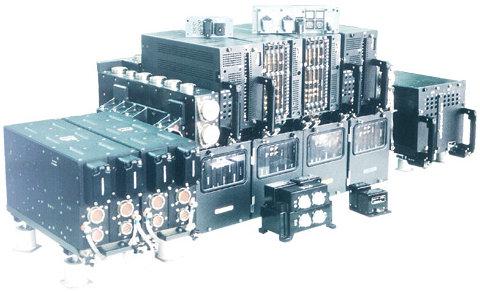
在图3 - 电源BP-58从SDU-10U,C(GC-27)的测试在低温下后。这是一个旧的系统,该系统也仍在生产。
资料来源:
认为,旧的飞机更加安全的今天,因为它们含有较少的电子产品。例如,A-320,我将试图解释如何保护和现代的“电脑”的飞机。
什么是«飞行线控»?
在航空控制飞机的曙光进行了机械 - 用绳子和连接控制(方向盘和踏板),与副翼和方向舵napravlyaniya和高度棒的帮助下
。 由于飞机的尺寸和速度生长和所需的体力来管理导频。为了帮助人们来助力机构(液压驱动器)。虽然他们推进试点工作,管理层仍在进行电缆及杆。这种系统的可靠性提供了冗余控制杆,电缆和致动器。
既控制方案 - 和机械增压泵 - 和仍然被用作轻型飞机,并为大飞机,其中包括对SR-71和AN-225“Mriya»。
在50年代中期为军用飞机开发新的,所谓的静不稳定的气动布局,从而在机动性显著增加,但不允许进行未经常数改正飞行。这是必要的,以抵御新出现的扰动速度比他们的发展。由于人的反应速率低,他没能解决这个问题,并控制静态不稳定的飞机是通过有线控制系统(或FBWCS飞行线控,FBW)开发。来自传感器和控制接收的数据的基础上,FBWCS形伺服信号的空气动力学表面(副翼和方向舵)。也就是说,一个人跑到FBWCS和FBWCS驾驶飞机。
首先FBWCS是模拟的,后来有数字。现在用在FBWCS几乎所有的作战飞机和从事民用航空。但在民航,他们不是为svehmanevrennosti
的目的
考虑飞行线控概念的实现作为飞机A-320的一个例子。

如果你进入驾驶舱A320,而不是方向盘找到操纵杆(在术语Airbus- saydstika)就在身边游戏机。每个saydstik配备有应变仪,其由计算机进行处理,考虑到目前的情况被发送到致动器的数据。
A320拥有一个飞行控制计算机7 - 2计算机ELAC(电梯副翼计算机),3台电脑SEC(剧透电梯电脑)2计算机FAC(飞行增稳计算机)
。
预计有关“硬件”问题 - 关于摩托罗拉68000处理器上运行ELAC电脑,SEC - 英特尔80186. smile.gif
每台计算机都有2个模块 - 控制单元和监控单元。事实上,它是接收并处理相同的数据2独立的设备。但是,如果监视单元检测我们的计算与计算控制单元的结果的结果之间的差异,然后在计算机被认为是错误的,其职能交由他的“伴侣”。为了避免可能出现的错误,软件控制单元和不同语言的程序员监控单元开发razymi队。*
甚至在完全失效一对的情况下,其他对能够执行其功能。因此,例如,稳定剂镶边满足计算机ELAC2。在失败的情况下,功能ELAC2能够承担ELAC1,然后SEC1,然后SEC2。也就是说,除了在平行相同电路块和那里的不同单元之间的功能的重复工作。这提供了多重冗余的飞行控制系统。
每台计算机都有以下参数的自诊断功能 - 控制处理器(看门狗和校验),控制电源,输入输出控制,反馈控制。通过比较来自不同设备接收相同的信号,提供诊断的投入。
有几个层次 - 飞行控制计算机,这在空中客车的术语叫“法律”模式
第一种模式 - 正常规律。此模式是主要的和最常用的。飞机将受导频,但不会超过攻击,过载,俯仰和滚动角的临界值,并还将控制速度,而不是让移动限制了最大和最小的速度为当前飞行模式。此方式保持在操作的情况下的任何计算机7的故障。
在拒绝的情况下多台计算机的激活第二种模式 - 备用法则。在这种模式下持续保护的关键超载的,以及对丢失或超速。
当多台计算机的故障模式被激活tretity - 直接法则。在这种模式下,来自saydstika的信号不被处理,并直接馈送到伺服。
在所有的飞行控制计算机7完全失效的情况下,A-320具有流体力学备份系统在速率和音高。
和结束。在A-320飞机坠毁的历史是设备的故障只有一次 - 在1988年,之后所有飞机都已经敲定
目前,它发布了约5000架飞机这个家庭。
工程师在波音公司更加严峻。
在这三个计算机系统的飞行线控飞机波音777,以避免错误来自不同制造商的三款处理器 - 英特尔80486,摩托罗拉68040和AMD 29050.他们都执行相同的任务。编写的软件ADA。然而,每个处理器需要其自己的饰板和编译器,这也增加了整个系统的可靠性。在识别所述计算机的结果的差异是关闭的。波音公司称该计划«三重三重冗余架构»。
而现在国家发展了一点检讨 - 在CDS-10的MK遥控

2007至2009年我曾在电子产品制造商(卫七,切博克萨雷),对这款产品的首席工程师。我写的大多是从内存,因为目前其他地方采用,并获得技术文档都没有。世界上只有一个总结。该产品是不是一个秘密。
CDS-10 mK的(CDS-10 mK的丝氨酸2) - 该机在纵向,横向的4倍冗余模拟 - 数字控制系统和跟踪通道。该系统取代了机械式控制接线。该系统安装在苏-30MK ...(主要为印度空军)零部件
2双电源供电。从直流额定电压27V两个独立的来源,在缓冲电池供电和400Hz的的115V频率的两个独立的三相交流电压供电的CDS的。可承受瞬态直流至50伏。 CDS - 生命保障系统。这架飞机只是下降,如果CDS否认
评价者。组合成若干块和一个衣柜。总之,它由60模块(读 - 印刷电路板)。生产加工来自传感器的输出信号的信号来执行转向齿轮。评估人员同时工作,并形成产生信号的媒介。该系统将继续在不同的渠道计算器两个独立的失败操作。也就是,在失败的情况下在它的计算器输出中的一个开始从其他计算器的信号不同。超过(贬低)将指定的阈值时,计算器被关闭,信号到声音告发,和控制面板。你可以尝试重新启动控制面板。如果几个故障信号变得不与任何比较和系统进入一个刚性连接(在此模式下控制的战斗机几乎是不可能的,因为它是不平衡的空气动力学设计,不断引线)。不是CDS-10 mK的一次灾害相关的故障不是。这起事故是这样的。
传感器。各种物理参数转换成电信号的飞行。在CDS传感器是完全独立于其他系统。即,例如,导航系统(PNA)和在CDS有传感器类似的功能。所有传感器4X复制。 CDS“删除”飞行参数如下:
- 静态和动态压力(DBP,DDD - 绝对压力传感器,差压传感器),用于测量的速度和高度。这些参数需要知道的,因为在不同的高度不同密度的空气,并以不同的速度,不同电阻
- 角速度(CRS,REM - 角速度传感器,陀螺传感器单元)。需要用于确定围绕它们的轴线的角速度旋转。 CDS立即返回该飞机到原来的位置为任何偏差滑翔
- (DPR - 冗余编码器)控制杆和踏板的位置。这些传感器被转换成电信号的位置控制旋钮在两个平面(滚动,俯仰)和踏板(当然)
板。 PP,PU - 远程验证,远程控制。设计用于CDS的测试性能并且在飞行
操作期间以及用于监视性能CDS的控制,并重新启动 转向机。设计成将电信号转换成机械的CDS。机械信号预放大的液压机,它们是CDS部分不包括模式

CDS可以在几种模式:起飞和降落,空中加油。模式的不同主要是传递系数和单个偏转表面的操作。例如,在“加油”平面移动要比在“飞行”更加顺畅。在飞行期间,该系统连续地监视在空间飞行,速度和方向的面的位置,并管理襟副翼,袜子,鸭翼,舵和高度,并在垂直平面上的喷嘴的偏转角。
该系统具有停止限制条件不允许导频带上飞机超出其能力。当接近极限制度笔试点开始发抖的境地,仿佛一架飞机分崩离析的权利,但实际上它是一种模仿。
生产工艺和质量控制
该系统已在国内的基础元件得到全面落实。制造商有自己的机械车间,用于生产印刷电路板,微电子厂的车间。该系统是不密封。所有印刷电路板具有在3层的清漆的形式的湿气屏障。特别敏感的化合物涂布纸板。支撑结构的数控设备制造。
质量控制为生产车间的各个阶段本身,OTC和军事设施。产品检验报告有96片的杂志相媲美。经过生产系统测试2周左右。
其他
该系统采用最严峻的考验,而在我看来,是最顽强的电子产品在飞机上。她的经历在温度-60..60度,小时晃动在振动台上,污染严重的盐,沙,蘑菇对。它重约120千克系统。和非常昂贵的,但它是制造商的商业秘密。
目前我们开发了一个现代数字对应(例如,SIC-35),但在CDS-10 mK的静止生产和使用成功。
在图3 - 电源BP-58从SDU-10U,C(GC-27)的测试在低温下后。这是一个旧的系统,该系统也仍在生产。
资料来源: