2386
Як гіроскоп на кермовому колісі вимірюється автомобіль

І не тільки кермовий круг був прив'язаний до гіроскопа! Друга була на нозі, а третина тягнеться гумовими кільцями до загарячої кришки. Всі ці трюки є для того, щоб дізнатися, чи працює кермовий круг не “направляється” і чи не є газовим педальом.
Незважаючи на те, що кермовий круг механічно підключений до коліс, а газовий педаль підключений до дросель, автомобіль не відповідає команді водія. Тим не менш, якщо передача є автоматичною, а електроніка “дулл”. Виявляє значно складність управління, може призвести до небажаних коливань. Тому важливо знати, наскільки швидко автомобіль реагує на команди водія.
Першим способом пошуку затримок є використання даних з порту On-Board Діагностика (OBD). Цей порт підключений до автобуса CAN. Використовується в сервісі для зчитування коду і помилок передачі. Також містить інформацію про поточну швидкість двигуна, витрата палива, кут газопроводу, відкриття дросельу та ін.
Для підключення до автомобільної шини я купив типовий китайський слуховий зчитувач за тисячі рублів.
Цей пристрій може бути підключений до будь-якого сучасного автомобіля. Однак дешевий зчитувач не дає більше інформації, ніж на автопристрою. Це, без використання для наших цілей. В цілому існує ряд проблем з діагностичним портом і шиною:
- Закриті протоколи та стандарти даних в автобусі
- Невідома точність/точність даних
- непередбачувані затримки
- Я не розумію.
- Таким чином, було прийнято рішення зібрати власні вимірювальні прилади від імпровізованих гіроскопів і arduins.
Техніка вимірювання
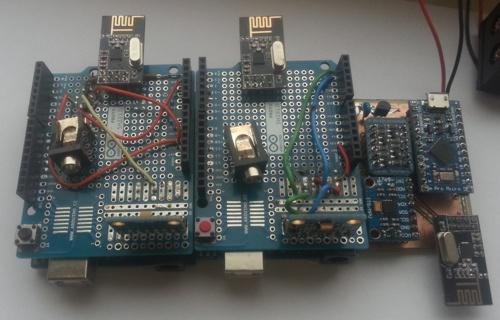
Першим гіроскопом був «надійно» прив'язаний до рульового колеса з липкою стрічкою. Він визначив кут рульового управління. Другий гіроскоп натягують на ногу водія з смугами для волосся. Він підштовхував гальмівний / газовий педаль. Останній пристрій був закріплений в салоні. Він, крім гіроскопа, мав акселерометр і зібрані дані з інших датчиків. Потім дані надсилали на ноутбук через віртуальний COM порт через USB.
 Р
Р
Як говорить капітан, необхідно синхронізувати час на всіх датчиках для вимірювання затримки. Тепер синхронізація виділяється “лобом”: приймальні датчики від часу отримання сигналу (ми визначаємо переривання від бездротового модуля) магічна константа – час, необхідний для відправки та отримання даних.
Щоб визначити цю чарівну констанцію, важко підштовхувати датчики один до одного і обертати. Затримка між свідченнями дає «магнітну констанцію».
На датчиках
Збираються два модулі на основі Arduino Uno:
- Додаткова схема (щільне) для прототипування, висадженої на вершині arduin;
- гіроскоп на основі МПУ-6050, пропалюється в щит;
- радіомодуль nrf24l01+, припалений в щит.
- двостороння плата за лазерну технологію;
- Плата за погодження логічних рівнів 5v <-> 3.3v;
- гіроскоп на основі інтерфейсу МПУ-6050;
- Радіо nrf24l01+.
Вимірювання
Я не маю автомобіля, тому ми протестували мій друг Костянтина Лукера.

Всі тести були проведені на загиблому кінці секції громадської дороги, тому швидкість не висока.
Костя їздила на швидкості близько 30 км / год активно обертається рульовим колесом і модулюючим газопроводом. Тренувальні машини поблизу шока до боків, переглядаючи наші неадекватні дії використовуваного лансера.
Я сидю з ноутбуком в пасажирському місці в часі, і я керував даними датчика.
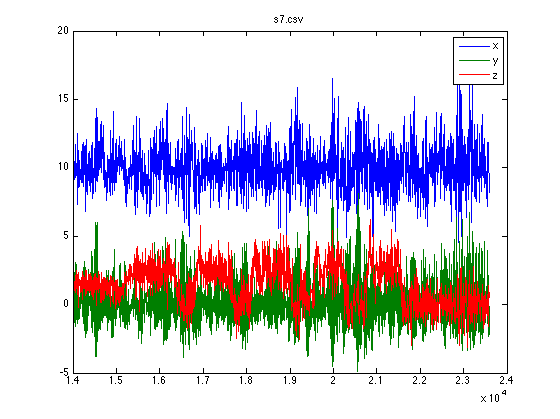
Наступний графік показує типові читання гіроскопа, витягнутих на ногу:
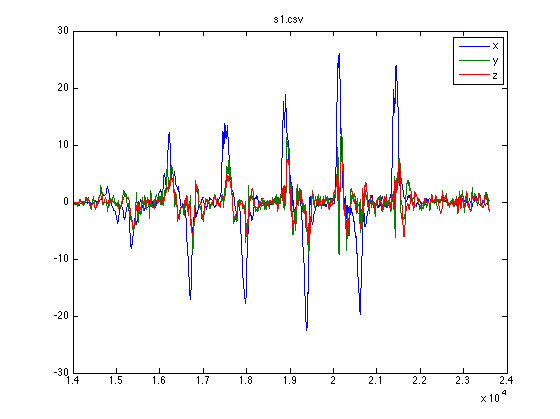
Вібрації двигуна, руки водія, дорога - все призводять до шуму. На графіках прискорення кузова автомобіля особливо помітні.
Для боротьби з високочастотним шумом дані було попередньо оброблено низькочастотним фільтром (фіксовано функцію матлаб). Фільтр був обраний таким чином, щоб не додати додаткову затримку до сигналу.
Звертаємо вашу увагу на те, що гіроскопи визначають швидкість обертання газового і рульового педалу, і нам потрібен кут. Для цього були інтегровані зчитування з датчиків на кермо і нозі. Після того, щоб розрахувати затримки (редагувати функцію Matlab).
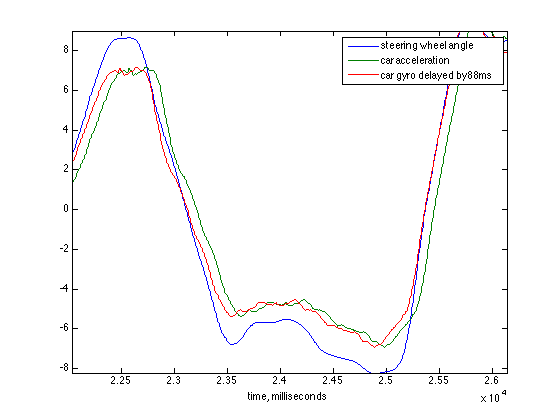
На графіку нижче показано кут педаль (s), прискорення автомобіля по відповідній віссі і прискорення автомобіля, встановленого для розрахункової затримки:
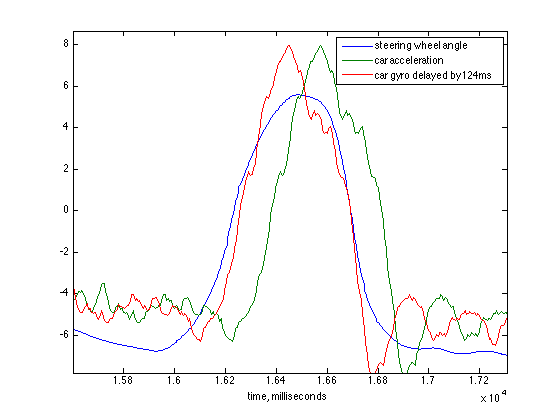
Костья пресувала і випустили газовий педаль, і автомобіль реагував тільки після 124 мілісекундів. Швидкість - близько 30 км / год, обороти - 3000 об/хв.
На швидкості 30 км / год, затримка авто до рульового керування за результатами індивідуальних випробувань, що обертаються в діапазоні 90 - 95 мс.
Плани
- Затримки інших транспортних засобів;
- Виміряйте час з моменту натискання педаль газу (або вивільнення зчеплення) до 100 км / год (або 402 м).
- Заміряйте міцність реакції на кермовий круг в свою чергу (поворот);
- Виміряйте імпульс водія перед/виходом/після курсу.
Джерело: habrahabr.ru/post/218029/























Як я увійшов дистанційну освіту в Walden (США)
Чому в Росії майже немає цивільно-комерційного високотехнологічного виробництва?