2385
如何陀螺仪方向盘控制测量

并且,不仅在方向盘附着陀螺仪!第二个是步行,第三拖累橡胶圈到烟灰缸的盖子。所有这些技巧 - 学习,而不是“滞后”如果方向盘,而不是“tupit”油门踏板是否
。
虽然车轮被机械地连接到所述轮毂,并且油门踏板 - 与油门,汽车立即响应驾驶员的指令。特别是如果自动变速箱和电子“tupit”。延迟显著复杂的管理,可能会导致不良的振动。因此重要的是要知道汽车上的驾驶员的命令的反应速率。
发现延迟的第一种方法 - 从OBD的端口(车载诊断系统)使用的数据。此端口被连接到车辆的诊断总线(CAN总线)。它被用来当读误差的发动机和变速器的代码。它还包含关于当前发动机转速,耗油量,煤油门踏板,油门等
信息 要连接到总线上,我买了一辆车一个典型的中国«OBD读者“一万卢布。
该设备可以连接到任何现代汽车。然而,廉价的读者提供了比上车的仪表的详细信息。即对于我们而言,这是没用的。综合来看,随着诊断端口和总线有一些问题:
- 在专有协议和数据标准总线
- 未知的精度/不准确的数据
- 不可预知的延时
- 我不明白这个 LI >
- 因此,决定从废旧陀螺仪和Arduin自己搜集的测量设备。 LI> UL>
测量技术 H4>
第一陀螺仪是“牢固”安装在把手遮盖胶带。他所限定的转向角。第二陀螺抽至驾驶员scrunchy的腿部。他通过制动踏板/气体。最后一个单元被固定在舱内。他除了陀螺仪akkselerometr和其他传感器收集数据。的数据,然后通过虚拟COM端口通过USB发送到笔记本电脑。


作为队长显然是必要的测量延迟同步时间上的所有传感器。现在同步relizovana“vlob”:接收传感器的信号(由无线模块的中断定义的)魔术常量的到达时间中减去 - 发送和接收数据所需的时间。
为了确定这个神奇的常数zhetsko压传感器,彼此旋转。读数之间的延迟仅仅给出了同样的“神奇常数”。
关于传感器 H4>
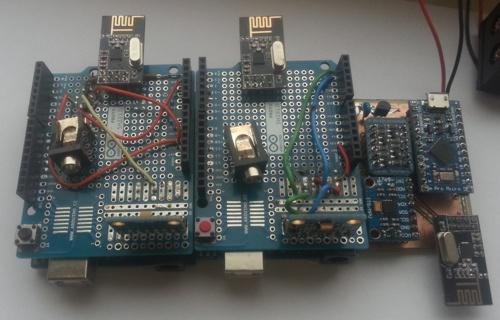
基于Arduino的乌诺收集两个模块:
- 在其他方案(盾)为原型,插在Arduino的顶部;
- 基于陀螺仪MPU-6050,焊接在屏蔽;
- 无线模块的nRF24L01 +,焊接在盾 LI> UL>基于Arduino的微观模型:
- 在双面电路板用的铁技术激光;
- 板匹配的逻辑电平5v的< - > 3.3V;
- 陀螺仪基于MPU-6050接口,I2C ;
- 收音机的nRF24L01 + LI> UL>
测量 H4>
我没有车,所以我们测试的三菱蓝瑟我的朋友康斯坦丁。

所有的测试都进行了死胡同路段一般用途,所以速度不是很大。
克斯特亚驾驶以30公里/小时的速度都在积极地转动方向盘和调制所述油门踏板。培训车辆避开附近横盘整理,看我们的行动没有足够的二手蓝瑟。
我坐在乘客座位上一台笔记本电脑,开车从传感器获得的数据。
下图反映了陀螺仪的典型迹象,拉腿:
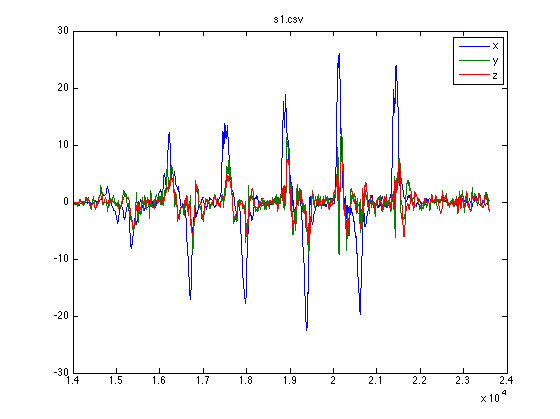
来自发动机的振动,驾驶者的手,道路 - 所有导致噪声。尤其明显它们出现在车身加速度的曲线图。
打击数据的高频噪声预加工的低通滤波器(功能filtfilt Matlab的)。该过滤器被选择,以便不引入信号中的附加延迟。
据我所知,陀螺仪确定油门踏板和方向盘的旋转速度,并且我们需要一个角落。对于这个证据来自传感器在方向盘和脚进行了整合。然后用于计算延迟的互相关(功能finddelay Matlab的)。
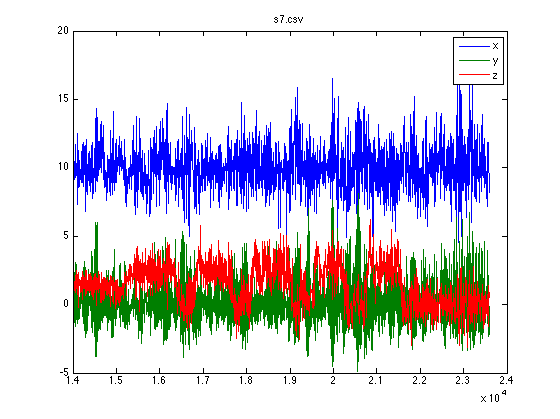
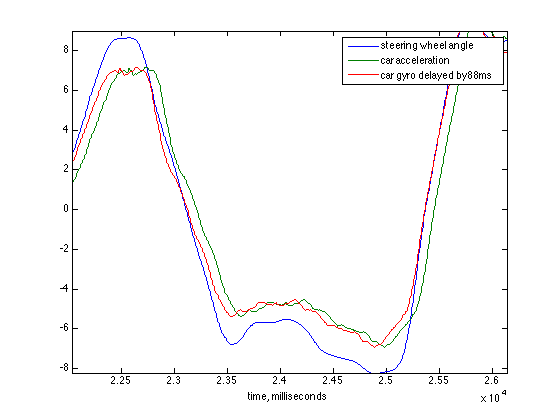
下面的图表显示了踏板(脚),沿各自的轴线并调整为所计算出的延迟的车辆的加速度的车辆的加速度的旋转角度如下:
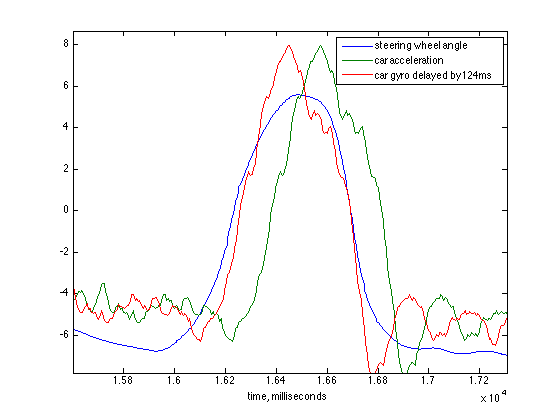
克斯特亚按下并释放油门踏板和车的反应后,才124毫秒。速度 - 30公里/小时的速度 - 3000转/分
。 在30公里每小时延迟到机器根据个别试验的结果的转向速度从90介于 - 95 MS
计划 H4>
- 在测量上的其他车辆的延误;
- 在测量时按下油门踏板的时间(或离合器释放)到100km / h(或402米)
- 要测量的反作用力在方向盘的圈(反馈);
- 前测量脉冲驱动器/中/线路通过后 LI> UL>
资料来源: habrahabr.ru/post/218029/