2385
¿Cómo miden mandos en el volante giroscopio

Y no sólo a la rueda de dirección se adjuntó giroscopio! El segundo fue a pie, y la tercera arrastró anillos de goma para la cubierta del cenicero. Todos estos trucos - para aprender, no "retraso" si el volante y no "tupit" si el pedal del acelerador
.
Aunque la rueda está conectado mecánicamente a las ruedas, y el pedal de gas - con el acelerador, el coche responde a las órdenes del conductor inmediatamente. Sobre todo si la caja de cambios automática y electrónica "tupit." Retraso complican significativamente la gestión, puede dar lugar a vibraciones indeseables. Por tanto, es importante saber lo que la velocidad de reacción del coche en las órdenes del conductor.
El primer método de búsqueda de la demora - utilice los datos desde el puerto de diagnóstico a bordo (On-Board Diagnostics). Este puerto se conecta al bus de diagnóstico (bus CAN) del vehículo. Se utiliza cuando un código de error de lectura del motor y la transmisión. También contiene información sobre la velocidad actual del motor, consumo de combustible, el pedal del gas de hulla, gas, etc.
Para conectar al bus, me he comprado un coche un chino típico «lector OBD" durante mil rublos.
Este dispositivo puede ser conectado a cualquier coche moderno. Sin embargo, el lector barato da más información que en los instrumentos del coche. Es decir, Para nuestros propósitos, es inútil. En conjunto, con el puerto de diagnóstico y el autobús tiene una serie de problemas:
- protocolos propietarios y estándares de datos en autobús
- una precisión desconocida / inexactitud de los datos
- retraso impredecible
- No entiendo este li >
- Fue, por tanto, decidió reunir sus propios dispositivos de medición de giroscopios de chatarra y Arduin.
Técnica de Medición h4>
El primer giroscopio fue "firmemente" adjunta a la cinta adhesiva del manillar. Él define el ángulo de dirección. El segundo giroscopio señaló a la pata de la scrunchy conductor. Pasó el pedal de freno / gas. Última unidad fue asegurada en la cabina. Tenía además la akkselerometr giroscopio y recoger datos de otros sensores. Los datos se envían luego a la computadora portátil a través del puerto COM virtual a través de USB.


Como su capitán, obviamente, para la medición de los retrasos necesarios para sincronizar la hora en todos los sensores. Ahora relizovana sincronización "vlob": la recepción de sensor resta de la hora de llegada de la señal (definido por la interrupción del módulo inalámbrico) constantes mágicas - el tiempo necesario para enviar y recibir datos.
Para determinar esta constante mágica zhetsko pulsa sensores entre sí y girar. El retraso entre las lecturas sólo da esa misma "constante mágica".
Acerca de sensores h4>
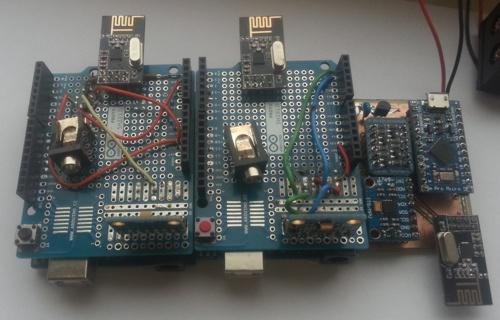
Recogió dos módulos basados en Arduino Uno:
- esquema adicional (escudo) para la creación de prototipos, plantado en la parte superior de la Arduino;
- giroscopio basado MPU-6050, soldada en escudo; NRF24L01
- módulo de radio +, soldado en Escudo
- tablero de doble cara por láser de la tecnología del hierro;
- niveles lógicos que coinciden bordo 5v & lt; - & gt; 3.3v;
- giroscopio basado interfaz I2C-MPU 6050 ;.
- Radio NRF24L01 +
Medidas h4>
Yo no tengo un coche, así que probamos en el Mitsubishi Lancer mi amigo Constantino.

Todas las pruebas se llevaron a cabo en un tramo de carretera sin salida para uso general, por lo que la velocidad no es genial.
Kostya conducía a una velocidad de 30 km / H están convirtiendo activamente el volante y la modulación del pedal del acelerador. Vehículos de formación se evitaban cerca de lado, mirando nuestras acciones no Lancer USADO adecuada.
Yo estaba sentado con una computadora portátil en el asiento del pasajero y conduje obtener datos de los sensores.
El siguiente cuadro refleja las indicaciones típicas del giroscopio, tire de la pierna:
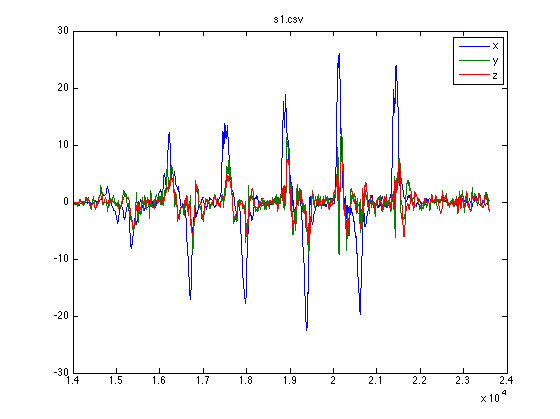
Las vibraciones del motor, las manos del conductor, camino - todo de plomo al ruido. Especialmente, obviamente, que aparecen en los gráficos de aceleración de la carrocería del coche.
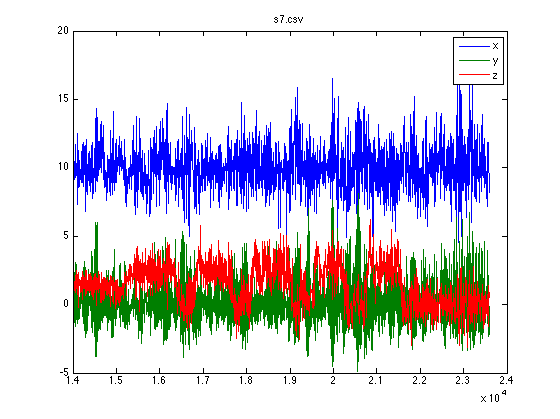
Para combatir el ruido de alta frecuencia de los datos pre-procesado de filtro de paso bajo (función filtfilt Matlab). El filtro se elige de manera que no introducir retraso adicional en la señal.
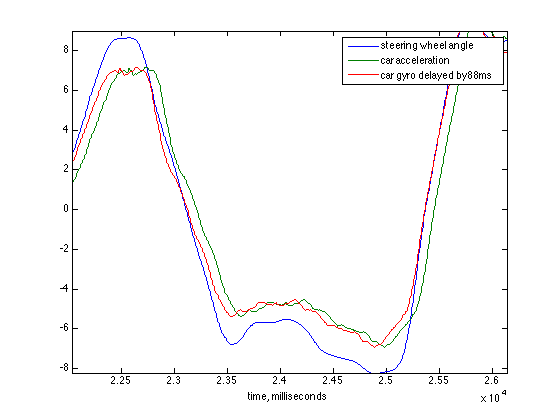
Tomo nota de que los giroscopios determinan la velocidad de rotación de la rueda pedal del acelerador y la dirección, y necesitamos una esquina. Por este testimonio de los sensores en el volante y el pie se integraron. A continuación, se utiliza para calcular el retardo de correlación cruzada (función finddelay Matlab).
El siguiente gráfico muestra el ángulo de rotación del pedal (pie), la aceleración del vehículo a lo largo del eje y la aceleración del vehículo ajustado por el retraso calculado respectiva:
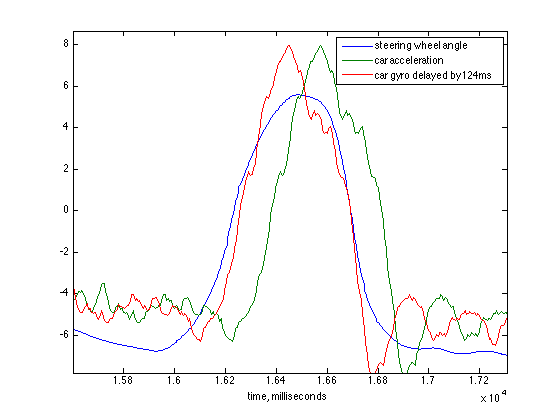
Kostya presionar y soltar el pedal del acelerador y el coche reaccionó sólo después de 124 milisegundos. Velocidad - a unos 30 km / h Velocidad - 3000 r / min
. A una velocidad de 30 kmh demora a la dirección de la máquina de acuerdo con los resultados de las pruebas individuales oscilaron entre 90 -. 95 MS
Planes h4>
- Medir el retraso en otros coches;.
- Medir el tiempo desde que se presiona el pedal del acelerador (o suelte el embrague) a 100 km / h (o 402 millones)
- Para medir la fuerza de reacción en el volante en una curva (retroalimentación);.
- Medir el conductor pulso antes / durante / después de la aprobación de una línea
Fuente: habrahabr.ru/post/218029/































Cuando entré en la educación a distancia Masters Walden (Estados Unidos)
¿Por qué Rusia casi no hay fabricación de alta tecnología civil / comercial?