Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
867
0.2
2016-09-21
Роботы-ликвидаторы — уникальная техника для Чернобыльской АЭС

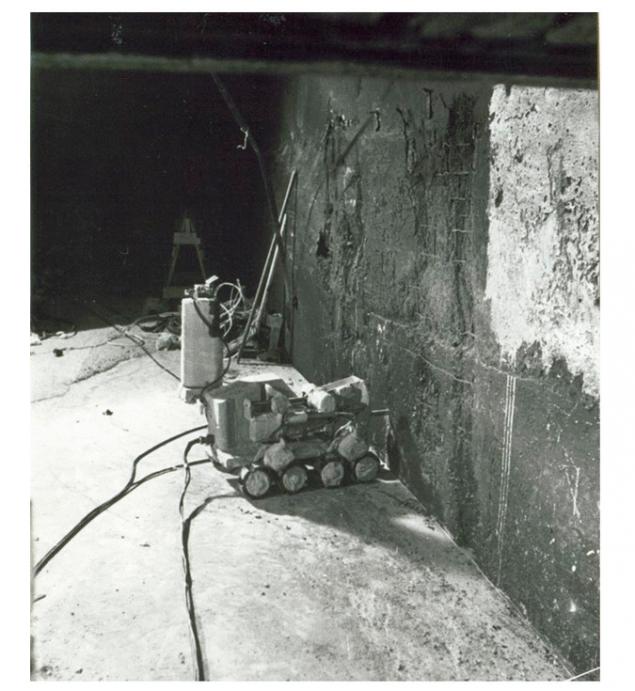
Центральный зал. Под кровлей «Укрытия».
После аварии от радиации на ЧАЭС люди гибли, а роботы сходили с ума. Поэтому ликвидаторам приходилось создавать новые уникальные агрегаты, порой, буквально на коленке.
Все началось с игрушки
Острая необходимость в использовании дистанционных средств разведки и диагностики при ликвидации последствий аварии на Чернобыльской АЭС появилась практически сразу после начала работ на разрушенном блоке. Главной целью стало получить необходимую информацию, не рискуя человеческими жизнями. Однако все существовавшие на тот момент российские и зарубежные роботы – их было около десяти – оказались непригодны для работы в условиях объекта «Укрытие».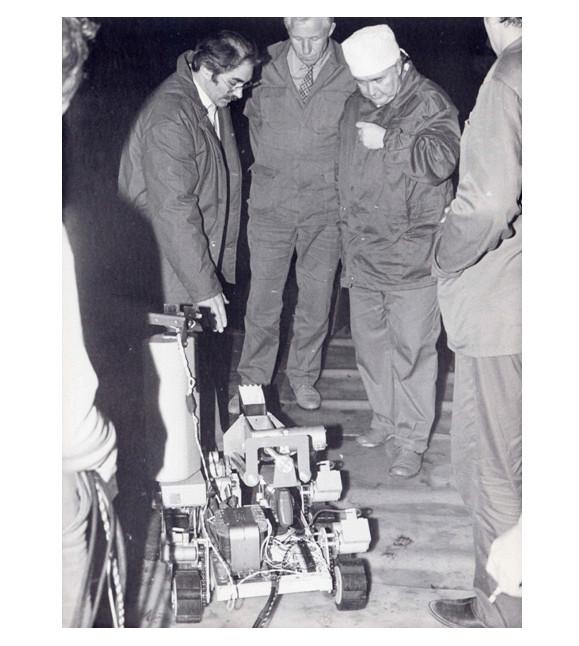
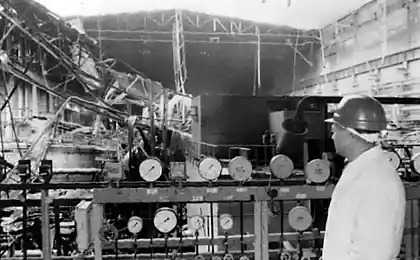
Испытание робота на полигоне в г.Чернобыль.
Агрегаты застревали в развалинах, из-за высокого уровня радиации они «сходили с ума», поскольку радиационные поля создавали помехи в электронных схемах, а кроме того, из-за подъема радиоактивной пыли при движении их было невозможно дезактивировать без риска для персонала.
Поэтому исследователям поначалу пришлось на месте из подручных материалов создавать роботов своими руками. Одним из самых известных примеров самодельных роботов стал пластмассовый игрушечный танк с кабельным пультом управления. Кабель заменили на более длинный, установили на игрушку дозиметр, измеритель температуры и закрепили мощный фонарь. По словам создателей, он стал чем-то вроде «охотничьей собаки», которая могла бежать на «поводке» перед исследователями, предупреждая их об опасности. Что немаловажно, он довольно легко отмывался от радиоактивности и смог прослужить до весны 1987 года, после чего был захоронен на блоке. А принцип вынесения электронной начинки в безопасную зону при помощи кабеля в будущем лег в основу специализированных агрегатов.
Наладка одного из роботов в лаборатории (г.Чернобыль).
Пылеподавление, разведка, монтаж
Разработка специальных робототехнических устройств началась только к концу 1989 года, когда была получена основная часть информации о состоянии конструкций внутри «Укрытия», местоположении и физико-химических свойствах топливосодержащих материалов (ТСМ). Задачу поручили Лаборатории физико-химических проблем ядерной энергетики Курчатовского института, а в составе Комплексной экспедиции была создана специальная лаборатория. Их сотрудники приступили к конструированию дистанционно управляемых самоходных агрегатов (ДУСА) для проведения разведки и дезактивации помещений «Укрытия». После создания в 1992 году Межотраслевого научно-технического центра «Укрытие» лабораторию преобразовали в Отдел дистанционных комплексов и технологий при нем.
Транспортные пути, рельсы(1), проложенные для передвижения ДУСА в центральном зале
и выходящие из выбитого окна пультовой (2).
Основные ДУСА можно поделить на три типа: агрегаты для пылеподавления, роботы для подготовительных и монтажных работ, а также разведчики. В основу большинства агрегатов были положены самоходные платформы, способные преодолевать препятствия высотой до 150 мм, выдерживать углы подъема ≤30% и двигаться по сыпучим и вязким покрытиям. Весили они от 30 до 50 кг, могли нести от 50 до 100 кг и передвигались со скоростью от 0,6 до 2,5 м/мин. Узлы пультов управления и бортовая автоматика были унифицированы благодаря специально разработанной единой системе передачи кодированных команд на борт установки.
Большой вклад маленьких ДУСА

ДУСА для очистки воздуха в помещениях «Укрытия» от пыли.
Первыми на объекте «Укрытие» применили роботов ТР-1, которые осаждали радиоактивные аэрозоли при помощи специальных растворов и наносили пылеподавляющие покрытия на стены, потолок и оборудование. Для этого на подвижную платформу установили специально сконструированную распыляющую установку. Несмотря на относительную простоту конструкции, применение ТР-1 позволило уменьшить коллективную дозу персонала примерно на10 тысяч мЗв.
ДУСА для отбора проб ТСМ и бетона — ТР-2 во время работы в пом.308/2.
При разработке плана по преобразованию «Укрытия» в экологически безопасную систему, одним из важнейших был вопрос о количестве и классификации радиоактивных отходов. В частности, надо было установить глубину проникновения топливной пыли в бетонные конструкции. Для этого был использован ДУСА ТР-2, который представлял собой смонтированную на шасси буровую установку. Агрегат позволял отбирать пробы в виде кернов диаметром от 8 до 60 мм с глубины до 200 мм. Движение и бурение специалисты за пультом отслеживали через черно-белую телекамеру.
ТР-4 передвигается в транспортном положении, поднята только телекамера (она также может быть сложена).
К концу 1990 года была создана еще одна буровая установка с глубиной отбора проб до 600 мм – ТР-4. Бурение производилось без использования промывочных жидкостей, что исключало вымывание фрагментов и образцов. Буровая головка установки могла придавать буровому инструменту как вращательное, так и ударное перемещение. На пульт управления помимо видеоизображения с робота поступали сигналы о срабатывании устройства подачи буровой головки и ее температуре. Чтобы робот мог добраться до нужного места через щели и провалы, буровое и телевизионное оборудование находилось в сложенном состоянии и разворачивалось в рабочей зоне. При помощи ТР-4 впервые были отобраны «горячие» керны из вертикальных скважин.

К маю 1994 года специалисты разработали многофункционального робота с универсальной рабочей платформой и сменными навесными приспособлениями: клещевым захватом, абразивным кругом, грузоподъемными вилами, ковшом для сбора материалов и рядом других инструментов. Клещевой захват позволял ТР-7 поднимать и удерживать груз весом до 50 кг и диаметром до 150 мм. При помощи резака с абразивным кругом робот отделял фрагменты металлоконструкций. Уголковыми вилами он переносил грузы, а ковш использовался для сбора сыпучих материалов.

Для телевизионной разведки по заданному маршруту с одновременным измерением мощности экспозиционной дозы (МЭД) был сконструирован ТР-10. На нем смонтировали черно-белую и цветную телекамеры, прожектор, и направленный в пол дозиметр, позволявший в реальном времени контролировать МЭД. Телевизионный блок мог поворачиваться в горизонтальной плоскости на угол ± 900, а в вертикальной плоскости на угол ± 300.
Там, где тележка не промчится
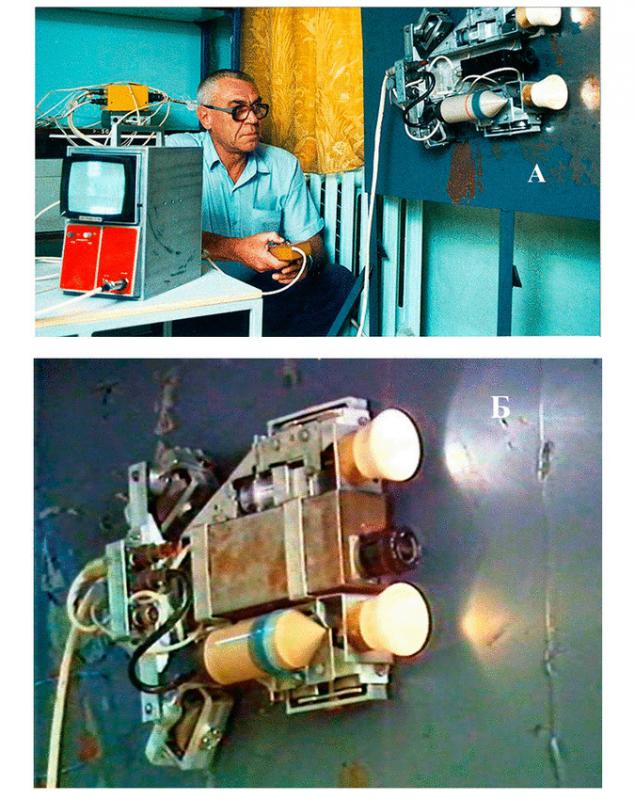
Тележки могли проникнуть далеко не всюду, например, в превратившиеся в развалины центральный зал и подаппаратное помещение 305/2. Но именно эти места представляли наибольший интерес с точки зрения обнаружения ядерного топлива, оставшегося в «Укрытии».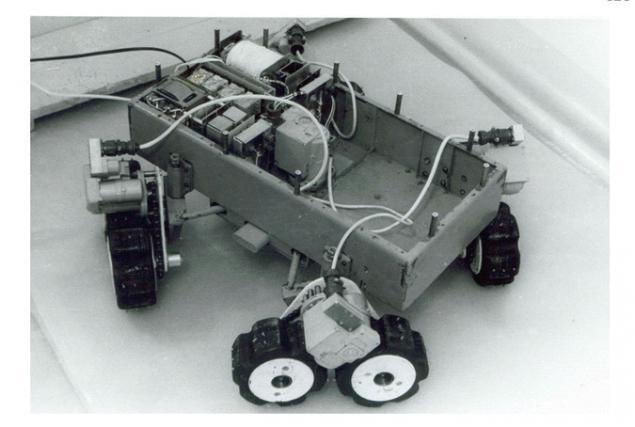
«Тележка» разворачивается на месте.
Тогда сотрудники Комплексной экспедиции предложили проложить специальные рельсы, и уже по ним пустить роботов с телекамерами и прожекторами. В 1990 году такие устройства были изготовлены. Из-за целого ряда трудностей в полной мере их использовать не удалось, но они позволили получить важную информацию о состоянии конструкций и скоплениях ТСМ в подаппаратном помещении. В дальнейшем при проведении разведки обследованных этими роботами помещений специалисты всегда опиралось на данные, полученные с их помощью.
Для обследования обшитых металлом помещений в 1990 году был создан магнитоход, который благодаря мощным самарий-кобальтовым магнитам мог нести значительный вес. Сдвоенные колесные блоки увеличивали надежность зацепления при преодолении сварных швов и фрагментов немагнитных покрытий. Также он мог буксировать прицеп с детекторами и отцеплять его в заданном месте.
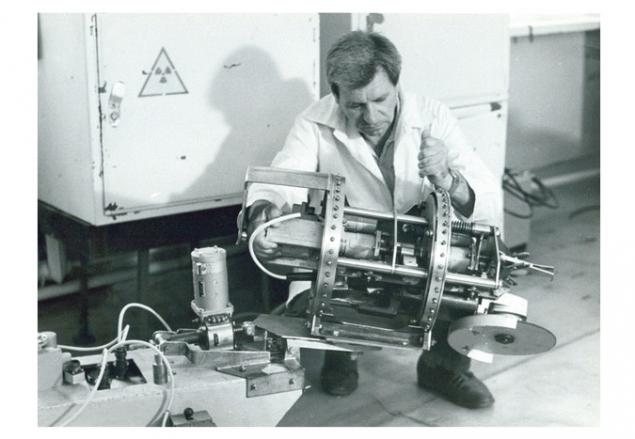
Магнитоход в лаборатории.
С помощью магнитохода на «Укрытии» устанавливались тепловые датчики в помещениях парораспределительного коридора. Кроме того, он помог измерить величину МЭД на северной контрфорсной стене, где были установлены восемь электронных дозиметров типа PD-3i.
Заокеанский гость
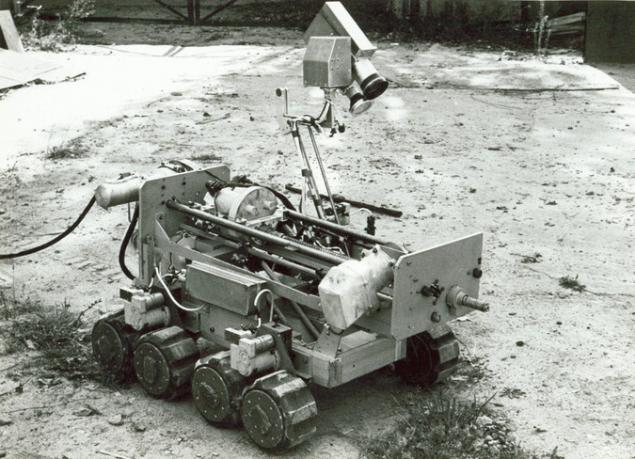
Поскольку Чернобыльская катастрофа стала событием мирового масштаба, агрегаты для «Укрытия» разрабатывали не только российские и украинские специалисты. Департамент энергетики США и НАСА специально для работ на ЧАЭС создали многофункционального робота Pioneer. Он состоял из самоходной тележки, системы управления и распределения энергии, системы дистанционного наблюдения с трехмерным картографированием, системы контроля состояния окружающей среды, манипулятора и бурового устройства для отбора образцов бетона.
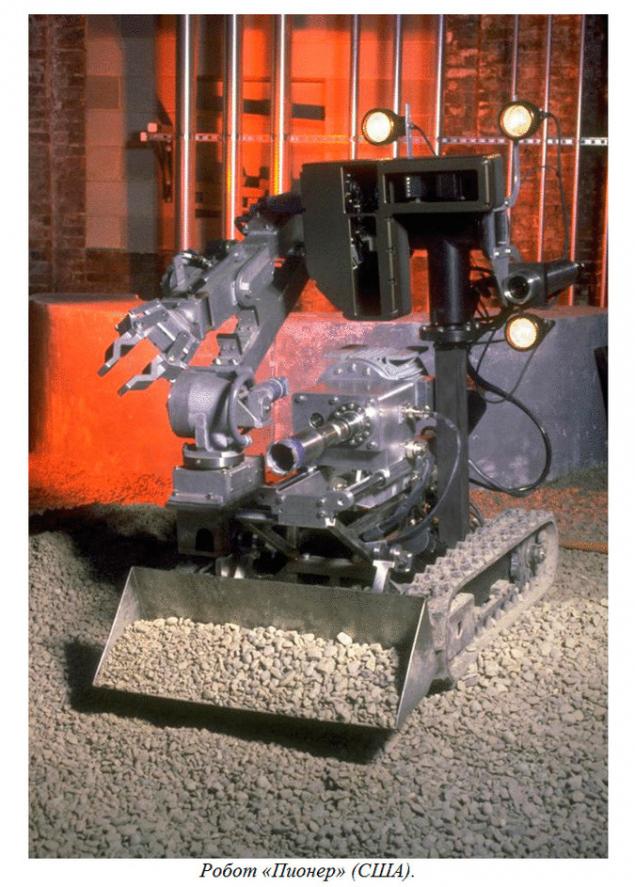
Четырехсотметровый кабель с пятью герметически закрытыми блоками позволял управлять Pioneer с безопасного расстояния. Робот умеет оценивать целостность конструкций «Укрытия», резать и доставлять образцы пола и стен.
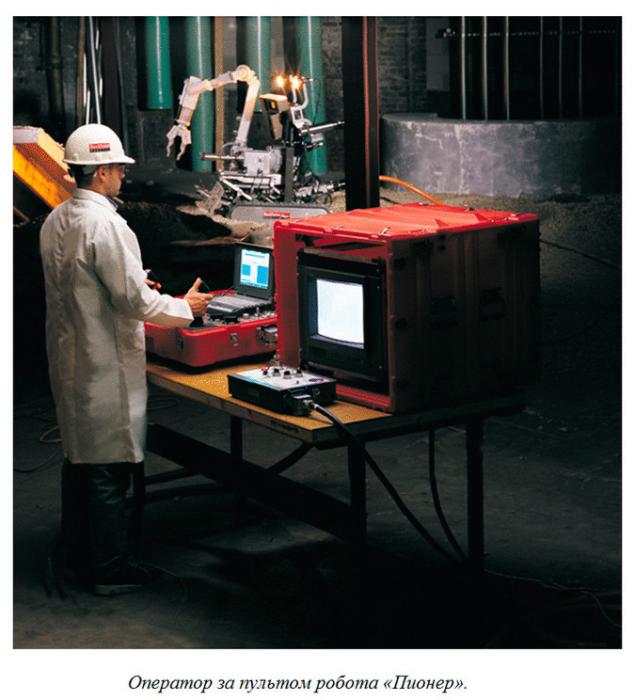
Главный его недостаток – высокая стоимость, которая оценивается в 3 миллиона долларов. Комплекс Pioneer передали Украине еще в 1998 году, но до сих пор он на «Укрытии» так и не применялся и находится в учебном центре Славутича.
Как это ни парадоксально, но колоссальный опыт Чернобыля не был учтен при ликвидации последствий аварии на «Фуккусиме-1» в 2011 году. Точно также как и советские ученые, японцы столкнулись с тем, что роботы оказались не способны вести разведку в условиях высоких радиационных полей. Дорогостоящие аппараты моментально выходили из строя. Привлеченные к работам французские и американские агрегаты также потерпели неудачу, вынудив отправлять в загрязненные радиацией помещения людей. А ведь весь этот тяжелый путь был уже пройден, колоссальный опыт накоплен и основные решения выработаны. Роботы на Чернобыльской АЭС не просто проделали титаническую работу, как и создавшие их люди, но и помогли сохранить человеческие жизни.

Робот, созданный специалистами региональных университетов Чиба и Тохоку (Япония) специально для работ внутри разрушенных реакторов АЭС «Фукусима -1». опубликовано
Источник: ridus.ru
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.