865
Robots-terminators is a unique technique for the Chernobyl nuclear power plant

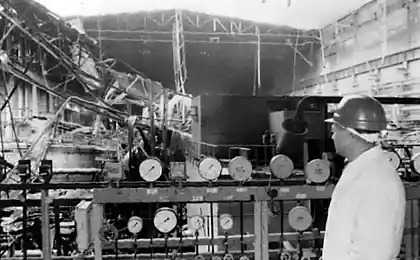
Central hall. Under the roof of the Shelter.
After the accident from radiation at Chernobyl people died, and the robots went crazy. Therefore, the liquidators had to create a new unique units, sometimes literally on the knee.
It all started with toys urgent need to use remote reconnaissance and diagnostics in the aftermath of the accident at the Chernobyl nuclear power plant appeared almost immediately after the start of work on the destroyed block. The main objective was to obtain the necessary information without risking human lives. However, all that existed at the time of the Russian and foreign robots – there were about ten – were unsuitable for the work in conditions of "Shelter"object.
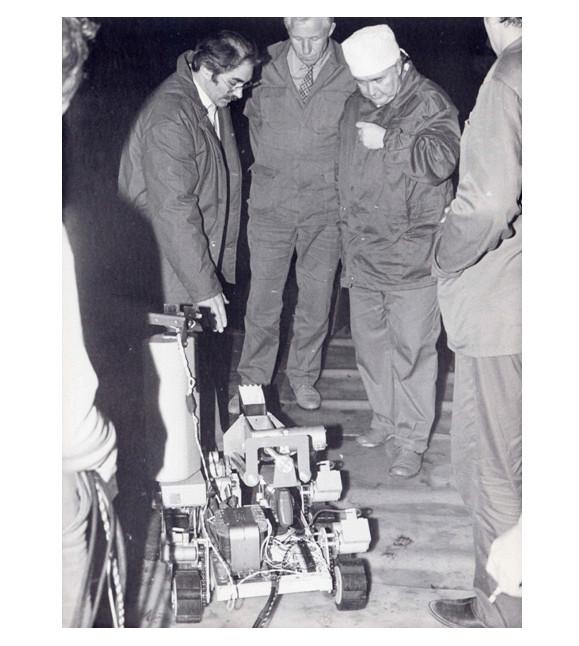
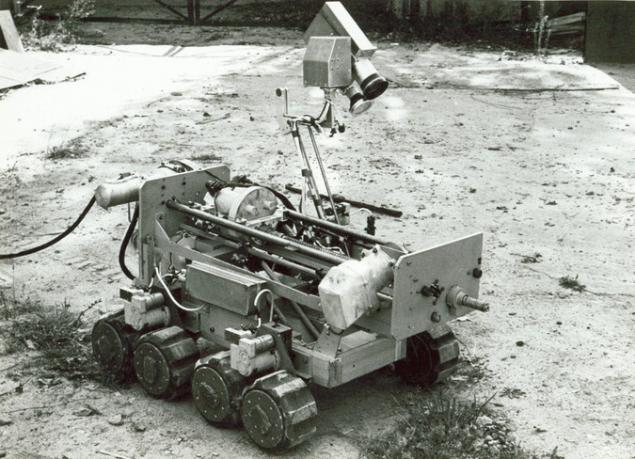
Test the robot on the ground in Chernobyl.
The units were stuck in the ruins, due to high levels of radiation, they "went crazy" because the radiation field created interference in electronic circuits, and in addition, due to the rise of radioactive dust when driving them it was impossible to deactivate without risk to personnel.
So the researchers initially had in place from scrap materials to create your own robot. One of the most famous examples of self-made robot became plastic toy tank with cable remote control. Cable was replaced by a longer, installed it on a toy instrument, temperature meter and secured a powerful flashlight. According to the creators, he has become something of a "hunting dog", which could run on a "leash" before the explorers, warning them of the danger. Importantly, it is quite easily washed from radioactivity and was able to last until the spring of 1987, after which he was buried on the block. The principle of adoption of e-filling to a safe area via cable in the future formed the basis of the specialized units.
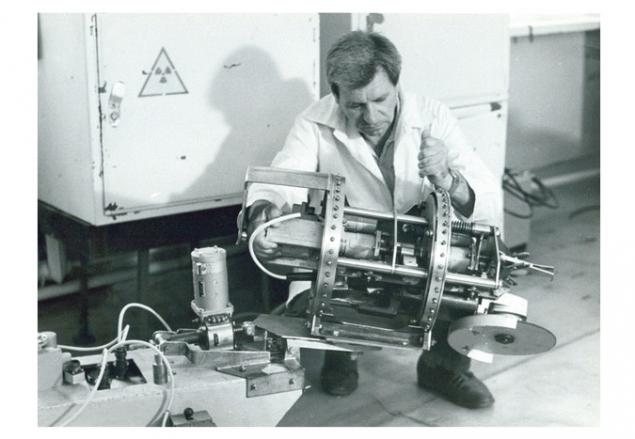
Adjustment of one of the robots in the lab (Chernobyl).
Dust suppression, exploration, installation and Development of special robotic devices only began to end in 1989, when it was obtained most of the information about the state of the structures inside the Shelter, location and physico-chemical properties of fuel containing materials (FCM). The task has been assigned to the Laboratory of physico-chemical problems of nuclear power Kurchatov Institute, and in the expedition set up a special laboratory. Their employees started constructing remote-controlled self-propelled units (DOUSAH) to conduct reconnaissance and decontamination of the Shelter premises. After the establishment in 1992, the Interbranch scientific and technical center "Shelter" of the lab was transformed into the Department of remote systems and technologies.

Transport routes, rails(1), laid for the movement DOUSAH in the Central hall
and out of broken Windows console (2).
Main DOUSAH can be divided into three types: the units for dust control, robots for preparatory and installation works, as well as scouts. The basis of most units was based on the self-propelled platform, able to overcome obstacles up to 150 mm, to withstand the angles of ≤30% and move on granular and viscous coatings. They weighed 30 to 50 kg, can carry from 50 to 100 kg and moved at a speed of from 0.6 to 2.5 m/min. the nodes of the control panels and on-Board automation have been standardized thanks to the specially developed integral system of transmitting coded commands aboard the installation.
The big contribution of small DOUSAH

DOUSAH for air purification in the premises of "Shelter" from the dust.
The first in the "Shelter" used robots TR-1 that precipitated radioactive aerosols with the aid of special solutions and applied pylepodavlenija coating on walls, ceiling and equipment. For this purpose, the platform has installed a specially designed spray installation. Despite the relative simplicity of design, the use of TS-1 allowed to reduce the collective dose of personnel of approximately 10 thousand mSv.
DOUSAH sampling of TSM and concrete — TR-2 during operation in the POM.308/2.
In developing the plan for transforming the "Shelter" into ecologically safe system, one of the most important was the question of the number and classification of radioactive waste. In particular, it was necessary to establish the penetration depth of the fuel dust in concrete structures. This was used DOUSAH TR-2, which was mounted on the chassis of the rig. The unit is allowed to take samples in the form of cores with a diameter from 8 to 60 mm with a depth of 200 mm. Movement and drilling specialists for remote monitored via black and white camera.
TR-4 is moved in the transport position, raised only the camera (it can also be folded).
By the end of 1990 was created, another drilling rig with depth of sampling up to 600 mm – TR-4. Drilling was performed without the use of drilling fluids that eliminated the leaching of the fragments and samples. Drill head setup could give a drilling tool both rotational and percussive movement. On the control panel in addition to the video image from the robot received signals of operation of the feeder of the drilling head and its temperature. So the robot was able to reach the desired location through the cracks and failures, drilling and the television equipment was in folded condition and unfolded in the work area. With the help of TR-4 were first selected "hot" cores from vertical wells.

By may 1994, experts have developed a multifunctional robot with the universal work platform and a removable mounted fixtures: tick-grip, abrasive wheel, lifting forks, a bucket for collecting the materials and other tools. Tick capture allowed the TR-7 to lift and hold a weight up to 50 kg and diameter up to 150 mm. With the cutter with abrasive wheel robot separated fragments of metal. The angle of the pitchfork he was carrying cargo, and bucket was used to collect granular materials.

For television intelligence on a given route with simultaneous measurement of the exposure dose rate (EDR) was constructed of TR-10. On it was mounted a black-and-white and color camera, searchlight, and directed at the floor of the dosimeter, allowing for real-time control of der. The TV unit can pivot in a horizontal plane at an angle ± 900, and in the vertical plane at an angle of ± 300.
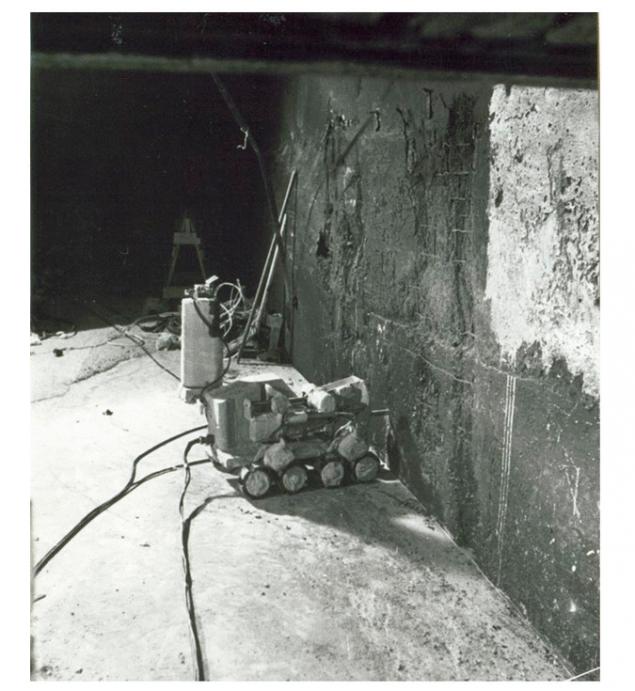
Where the truck, not race Truck could spread not everywhere, for example, turned into the ruins of the Central hall and podupirati the room 305/2. But these places were of most interest from the point of view of detection of nuclear fuel remaining in "Shelter".
"Truck" takes place on the spot.
Then the officers of the expedition proposed to lay a special track, and have them to put robots with cameras and projectors. In 1990, these devices have been manufactured. Due to a number of difficulties in fully to use them failed, but they allowed us to obtain important information about the condition of structures and clusters of FCM in pteparation the room. The further exploration of these robots surveyed areas professionals have always relied on data obtained with their help.
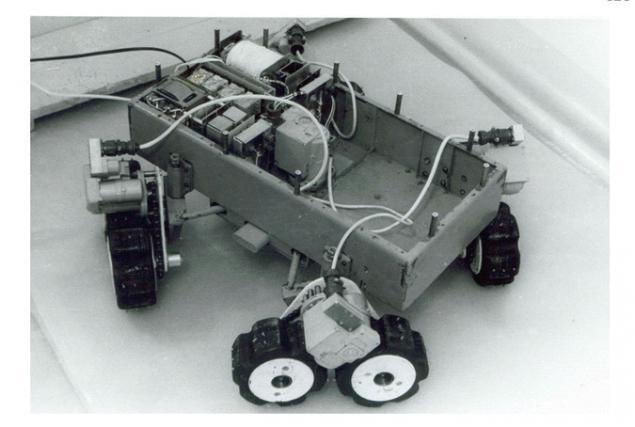
For examination of metal sheathed areas in 1990 was created magnetoid, which, thanks to a powerful samarium-cobalt magnets could carry considerable weight. Dual wheel units have increased the reliability of the gear when breaking the weld beads and fragments of non-magnetic coatings. He also was able to tow the trailer with the detectors and to unhook it at the specified location.
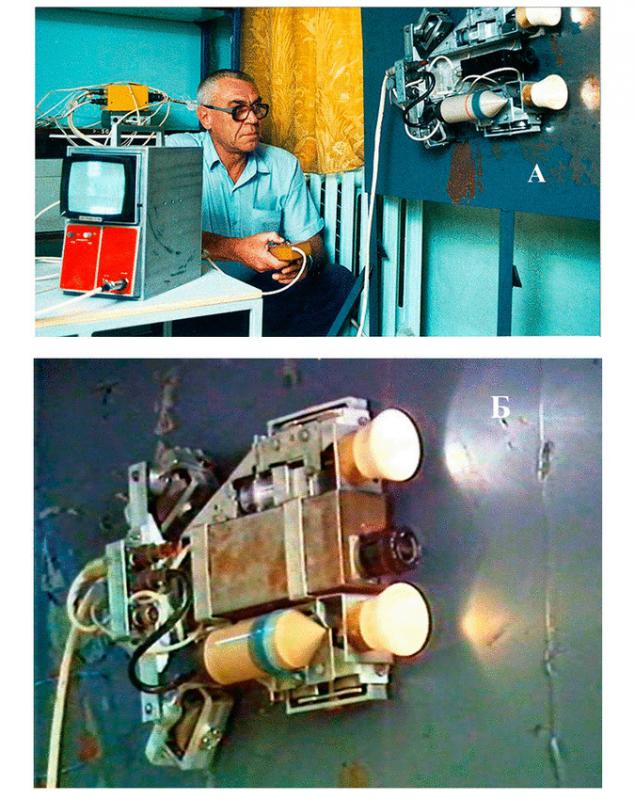
Magnitogo in the laboratory.
Using magnitofona on the "Shelter" had installed heat sensors in areas of the steam distribution corridor. In addition, he helped to measure the value of der on the Northern buttress wall where it was installed eight electronic dosimeters PD-3i.
Overseas guest
Since the Chernobyl disaster became an event of global scale, the units for the "Shelter" were developed not only by Russian and Ukrainian specialists. The US Department of energy and NASA specifically for the work at Chernobyl has created a multifunctional robot Pioneer. It consisted of a self-propelled truck, the control system and power distribution system remote monitoring with three-dimensional mapping, monitoring systems, environmental, manipulator and drilling device for sampling concrete.
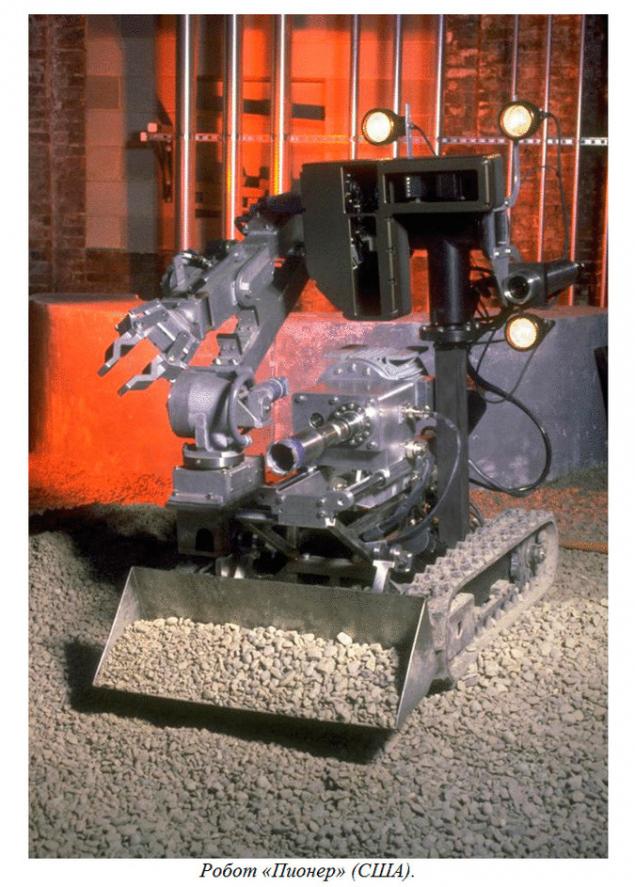
Chetyrehmetrovy cable with five sealed units allowed to operate the Pioneer from a safe distance. The robot is able to assess the integrity of structures "Shelter", to cut and deliver samples of the floor and walls.
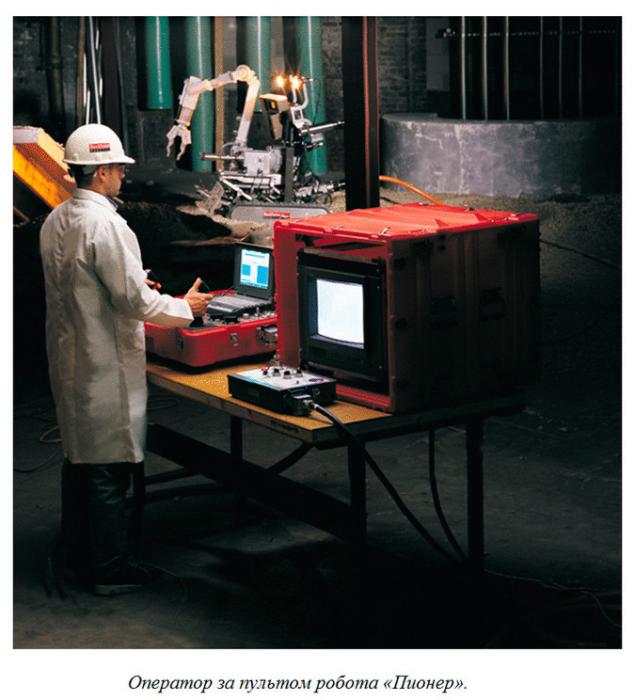
Its main disadvantage is high cost, which is estimated at $ 3 million. Complex Pioneer was transferred to Ukraine in 1998, but until now, he is on the "Shelter" never used and is in the training center Slavutich.
Paradoxically, but a tremendous experience of Chernobyl has not been taken into account in the aftermath of the accident at the "Fukushima-1" in 2011. Just as the Soviet scientists, the Japanese were faced with the fact that the robots were not able to explore in conditions of high radiation fields. Expensive devices instantly fail. Attracted to the works of the French and American units also failed, forcing to send contaminated with radiation facilities of people. But all this the hard way was already passed, enormous experience has been gained and the main solutions developed. Robots at the Chernobyl nuclear power plant just did a Titanic work, like the people who created them, but also helped to save lives.

The robot, created by experts from regional universities of Chiba and Tohoku (Japan) for work inside the ruined reactor nuclear power plant "Fukushima -1". published
Source: ridus.ru