As technological innovations will change everyday life

Robots can significantly improve our quality of life at home, at work and at play . Specialized robots that work alongside people , will create new jobs and improve the quality of already existing jobs and generally give people more time to focus on what for them is interesting, important and exciting.
Travel to work in self-managed cars allow read, reply to e-mails, watch videos and even nap. Having delivered to the destination of the passenger cars will be able to choose the self-governing other, coordinate with other cars in the self-managed system, which is designed to minimize traffic and latency. In general, all while traveling in a car is a безопасным and effective , than a machine running man.
However, the purpose of robotics - not replace people through the processes of mechanization and automation tasks , but to find a way for machines to help people and to cooperate more effectively with them. Robots are better than humans process digital data, lifting heavy objects and moving in certain situations with greater accuracy. People are better than robots cope with abstract tasks that require creative thinking and generalizations, because of their ability to reason, remember similar cases from previous experience, and thanks to the gift of imagination. Working together, robots and people skills can complement each other and thereby increase the effectiveness of their work.

The robot is in the prototype robotic cuisine created Moley Robotics, cooking soup with crab on the company's stand at the world's largest industrial technology fair Hannover Messe, which took place in Hanover, April 13, 2015. Em>
However, there are significant differences between what the robots are today, and those фантастическими promises of the coming era of "ubiquitous robotics" when robots are part of everyday life as an essential and ubiquitous as PCs and smartphones today, performing a variety of specialized tasks and are often working alongside people. Current studies are aimed at improving the design of the assembly itself and robots, how they move and manipulate objects, they argue, are perceived their environment and how they взаимодействуют with each other and with people .
Creating a world of pervasive specialized robots cause serious difficulties, but this is not the challenges that researchers have encountered for nearly three decades ago, when the dream of a world where computers have become an integral part of human society. Mark Weiser, who in the 1990s was the main researcher of the Research Center of Xerox in Palo Alto and is considered the father of the so-called ubiquitous computing, said: "The most advanced technologies - those that disappear. They become part of everyday life, integrating into it as far as to become completely invisible. " Computers have already reached such ubiquity. In the future, robots will be as far as common.
your own personal robot
Computers have achieved omnipresence in everyday life. In the future, robots will also be distributed as well.
Blockquote> The possibilities are determined by the robot that can do his staff, as well as those that can calculate and control the brain. Today's robots can perform basic movements on the ground, in the air and in the water. They are able to recognize objects, to mark features of the environment, to carry out operations on the assembly line of the "loading / unloading" to imitate simple human movements, acquire skills, and even the simple act in coordination with other partners robots and humans. For machines with all these features can be seen on the World Cup in football among robots RoboCup, in which robots are coordinated team to make a pass, sending the ball and score goals.
This functionality has been made possible through the use of innovation in the development of robotics, as well as by improving the algorithms that control perception, thinking, control and coordination of the robot. Robotics has received a lot of benefits due to the progress in many different areas: compute, storage, Internet, wireless, electronics, engineering and manufacturing tools.
Electromechanical components used in robotic devices have become more reliable, and the knowledge base, accessible to intelligent machines also grew thanks to the Internet, and as a result it has made it possible even to reduce the cost. So people got a real opportunity to move from the use of a personal computer to use a personal robot.
Self-vehicles can reduce the number of cars on the road by about 80 percent, while also decrease travel time and pollution.
Blockquote> In recent years, robotics has become better manifested in the field of transport. Many of the major car manufacturers have announced plans to establish a self-governing machines and predict that in 2020, consumers will be able to purchase such vehicles. So, самоуправляемые Google cars have traveled nearly 2 million miles, and during that time was just 11 minor accidents, most of which are caused by human error; and this summer the company began testing of vehicles on public roads. Also, projects on the development of self-cars have been launched in several universities around the world. Meanwhile, in California, Florida, Michigan, Nevada, have passed laws that allow the use of self-managed state road cars, and many other state legislatures in the United States are already considering such a possibility. It was recently published annual report of the Land Transport Authority of Singapore, which noted that "self-guided vehicles sharing" - self-park cars, which provide personalized transportation can reduce the number of cars on the road by about 80 percent, while also decrease travel time and pollution environment.

The robot, preaching my car: self-guided vehicles Google, in May 2014. Em>
Self-cars are not only a means of luxury: as the cost of production and maintenance of fall, their distribution can significantly improve the entire system of public transport. Imagine the public transportation, which runs in two planes. The first - a network of large vehicles, such as trains and buses, to be used for long-distance travel. The second - an additional small self-park the cars that will be used for short individual trips, picking up passengers at the main stops (also can be used for individual trips to almost anywhere). In 2014, a project called "Urban Mobility of the future", created by a team of the Alliance of Singapore and the Massachusetts Institute of Technology (MIT) Research and Technology, offered to the public to try a ride on a self-carriage, resembling a golf cart in the Chinese garden in Singapore, which is a park with winding paths surrounded by trees, with benches and lots of people strolling. More than 500 people participated in this project. Robotic cars drove along the paths, making the rounds of pedestrians and passengers brought in the right place for them.
To date, this level of self-car use is only possible at low speeds and a simple motion path. Robotic vehicles still can not cope with the difficulties of movement "in the wild", including inclement weather and difficult road situations. These issues - the focus of ongoing research.
As You Like It
The widespread introduction of robots will require a natural integration of intelligent machines in the human world, not human integration into the world of machines. Despite the recent significant progress in this area in three important areas still remain a problem. Design and creation of new robots still take up too much time, existing today, robots are limited in their ability to perceive the world and judge their environment and communicate with the robots are still quite fragile.
Today there are many different types of robots, but the production of any of them takes time. Existing robot body is difficult to adapt or change, and thus, robots are limited both opportunities and applications. Today, the rapid production of new robots, additional modules, accessories and specialized tools is not possible, since the processes of design, installation, and programming is quite time-consuming. What is really needed is the development and manufacturing of tools that accelerates the production of custom robots. Now a team of researchers from Harvard University, MIT and the University of Pennsylvania working on a robot-compiler that can target certain specification. For example, you say, "I want a robot that will clean up the room," and you are developing a robot plan its production and specialized programming environment for its use.
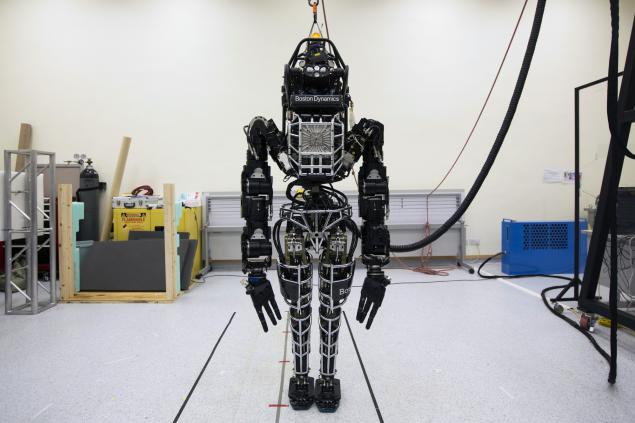
two-legged humanoid robot "Atlas", originally developed by the US company Boston Dynamics, presented to representatives of the mass media in Hong Kong in October 2013. Em>
More quality-minded robots help automate a wide range of tasks. Consider the production. Currently, the use of automation in enterprises is uneven across all industries. Engineering automate about 80 percent of its assembly processes, which consist of many repetitive tasks. But in the electronics, including the manufacture of mobile phones, only 10% of automated processes. This is due to the fact that such products are often changed and made according to special technical requirements. Created custom robots could help fill this gap by reducing changeover time for automation in industries where often used customization and products relatively short period of operation. Specialized robots will know where your items are stored, how they need to pack, how to interact with people, how to transport parts from one place to another and how to reconfigure the conveyor. The factory equipped with such robots, process control will be people-workers and robots will help them.
Abilities comprehension
The second problem that arises in the integration of robots in everyday life - is the need to increase their ability to interpretation. Modern robots have only limited thinking, as their information processing is strictly limited. All that makes the robot using simple written instructions, and the scope of comprehension of the robot is contained in its program. Furthermore, the perception of the robot its environment through its sensors is very limited. Tasks that people are quite easily, for example, the answer to the question "Have I been here before?" Robot is the extraordinary complexity. To record a special place in which they are, the robots use sensors, such as cameras and scanners. But the machine is quite difficult to determine the difference between the place where she was, and another that contains the same objects. In general, robots collected too much low-level data. Modern research on machine learning focused on developing algorithms that can help to extract from large data sets useful information for the robot. Such algorithms will help him to generalize its data and thus significantly reduce, for example, the number of shots required the robot to respond to the question "Have I been here before?»
Robots also can not cope with unexpected situations. If the robot encounters circumstances for which it has not been pre-programmed, or which go beyond its capabilities, the system issues an error and exits. Often, the robot can not tell the reason for the error. Program robots need to be adjusted so as to adapt to the environment and easier to interact with people and their environment, and other machines.
Blockquote>
Today, all those who have access to the Internet (including robots), can easily get incredible amounts of information. Robots can use this information to make more informed decisions. For example, the robot dog walking can find weather information online and then use their already stored data to determine the ideal length and optimal route of movement if the heat on the street or on the contrary, the rain, the walk will take just a few minutes, and if the weather the good, the robot chooses a long walk to the park, where there are other dogs.
How to help the robot?
Integration of robots in everyday life also requires a reliable communication between robots, as well as between robots and humans. Despite advances in wireless technology, there are still aspects that prevent communication between robots. All the same it is difficult to model and predict how well the robots will be able to communicate in any environment. In addition, the effectiveness of methods of control of robots that rely on communications technology in use today, is reduced due to extraneous signals and data as it is difficult to send and receive commands. It wanted a more robust approach to communication that would guarantee the necessary bandwidth when needed. One of the most promising new approaches to this problem is to measure the quality of communication around the robot - instead of trying to predict the quality of it, using the model.

Humanoid robot Kirobo shakes hands Tomotaka Takahashi, CEO of Robo Garage Co, June 26, 2013. Em>
Communication between robots and humans is also currently very limited. Although there audiodatchiki and software for voice recognition to the robots can understand the main voice commands ("Move to the door") and respond to them in terms of coverage and vocabulary such communication is very limited. Deeper communication between humans and robots will allow the latter to ask people for help. It turns out that the robot performs a task, even a small human intervention completely changes the way it decides to challenge before it, and significantly expands the capabilities of the machine to perform more work. The research group at the Laboratory of Computer Science and Artificial Intelligence at the Massachusetts Institute of Technology has recently developed a system by which a group of robots gathered furniture from IKEA . Robots working together as parts for assembly are within their reach. When any part of, for example, the leg of the table, was out of reach, the robot identifies the problem and asked the man to give him the necessary detail, using sentences in English. Having the right part, the robot continued to work on the assembly. The ability of the robot to understand the problem and ask for help from people - this is a huge step toward a more efficient and productive cooperation between humans and robots.
Thank you, Comrade robot
Personal computers, wireless, smartphones and downloadable applications democratized access to information, and it changed the way we live and work. In the future, robots will contribute to this digital revolution, expanding it in the physical world and everyday life, and the consequences of such a development would be extremely important and serious.