1512
How to make a robot in 24 hours
When the categories on which the planned act, will not, and the exams are not far off. I>
Introduction
It turned out that this season I was seriously engaged in only micro-sumo: started doing the robot in July 2013, graduated from the end of March 2014. Competitions are robosumo usual, but the mass of the robot must not exceed 100 grams, and the robot in the starting position should be placed in a cube 5 cm * 5 cm * 5 cm. He exhibited his only one competitions 6 April, where he was the only one robot.
Black Python competes with double-sided adhesive tape. I>
As in St. Petersburg at the moment only 2 robot of this class, in the May competition did not include this kind of competition. And since the act would, I decided to make a quick layntreysera, robot motion along the line, good for 5 years was their hobby robotics pieces 10 (excluding made from Lego).
Design
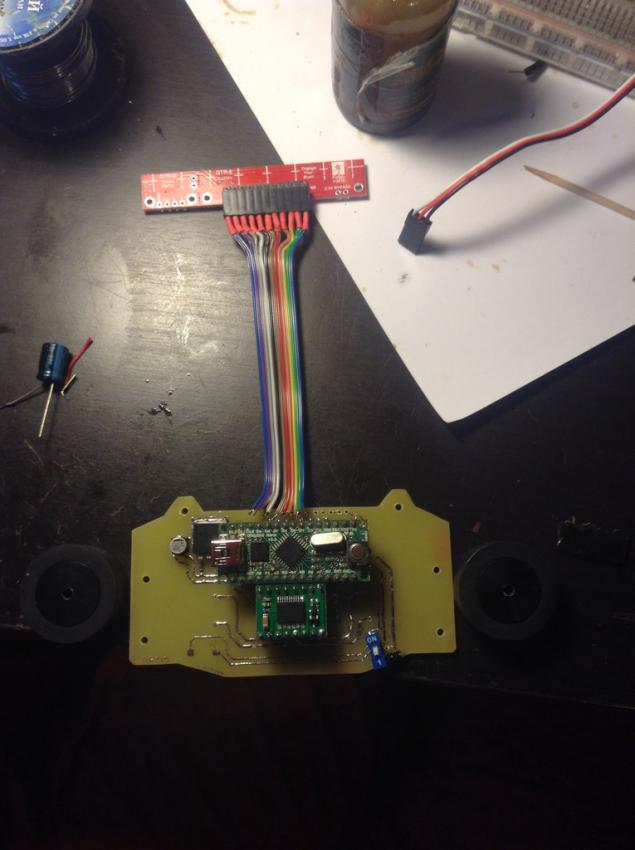
Since the task was to make the robot in shortest terms, it had to resort to a ready solution: Freeduino Nano, modular motor driver and finished strap sensors. Ability to start the robot only appeared on Saturday in 12 hours.
14.00: bullet in Micronika for missing parts!
15.00: Phew, came home with all the details please.
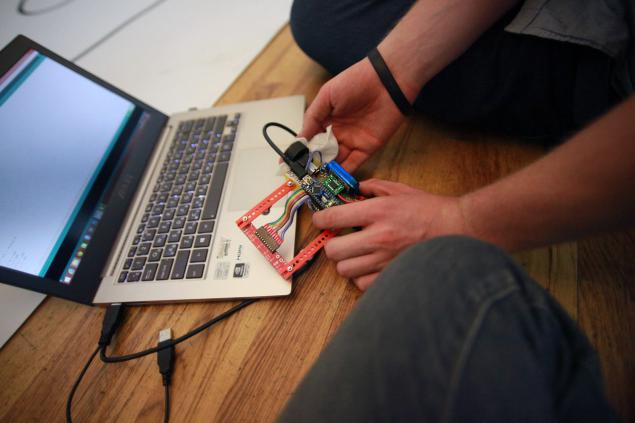
15.30: Ate, and can be designed. I really wanted to make a beautiful robot, but the presence of modular components and a limited amount of time has reduced it all to nothing, so think long on the design and layout, I did not.
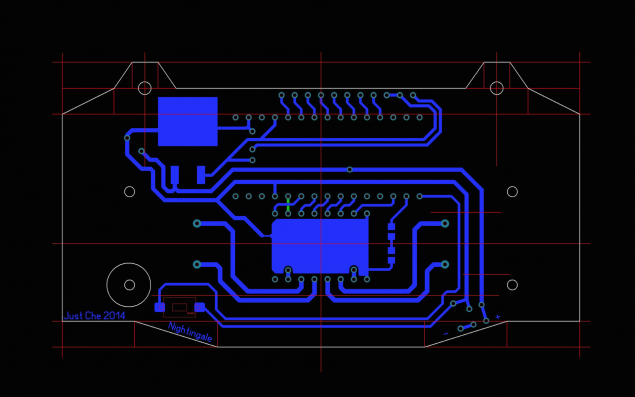
18.30: That's the final version of the wiring (there were 2 more).
Making design
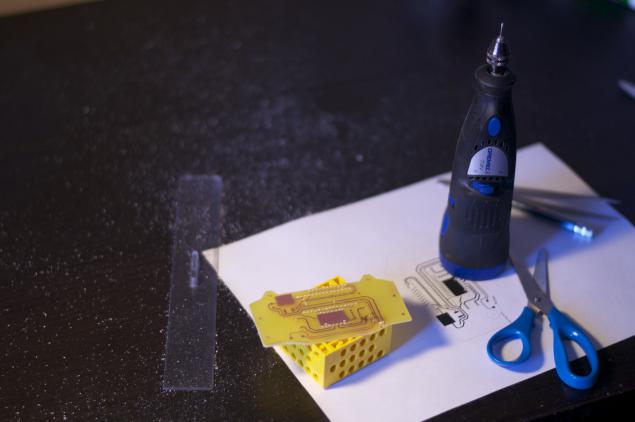
Initially the plan was simple: LUT - & gt; sawing boards - & gt; Drilling - & gt; Soldering - & gt; mounting of motors and sensors. But when things go without adventures? There was only a matte paper that Lut is not comme il faut, parts scattered on the packages and boxes, etc.
18.35: Well, damn it, not extinct.
18.40: Well bliin, toner does not come, will have more time to cut PCB.
18.50: Phew, now translated.
19.00: etched, now Peel drills.
19.10: drank.
19.15: Soldering, brazing and soldering again.
19.30: Ahh! Quick-disconnect couplings solder unreal, that I would once again made tracks loot from the same side as the elements.
20.20: Oh well, it's all just below perekinu postings.
20.40: Oh her, the stabilizer is working, not even hot. You can take a break for a pizza.
21.10: It's time to continue to make the bot.
21.30: And where motor driver?
21.50: Found. Now need a neat loop for connection to sensors Dunya.
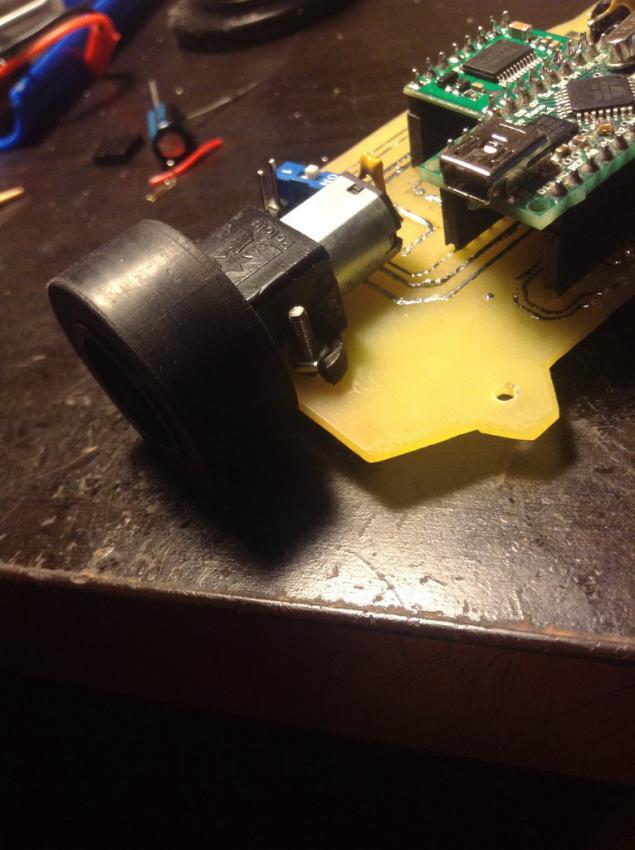
22.20: Okay, now the motors. 22.30: Why fixing cracked?
22.40: Hmm, what to do from the rack sensor?
23.10: Okay, this is a problem tomorrow.
23.25: Shorty. It is necessary to rewire a bit.
23.30: rewire. Works, not heated.
23.50: Come on, Arduino, zaprogaysya already!
00.30: Do not put draysery for her, well, what can we do. Tomorrow, on the other changed. And now we need to get together to compete and have a sleep.

9:30: He came to the competition.
10.00: register, took a fancy box (thickness of lines 1, 5 cm)

12.00: Anything with the design finished, NASU shift, put the rack, scraper stuck.
12.30: Looked at the other, and you can start progat.
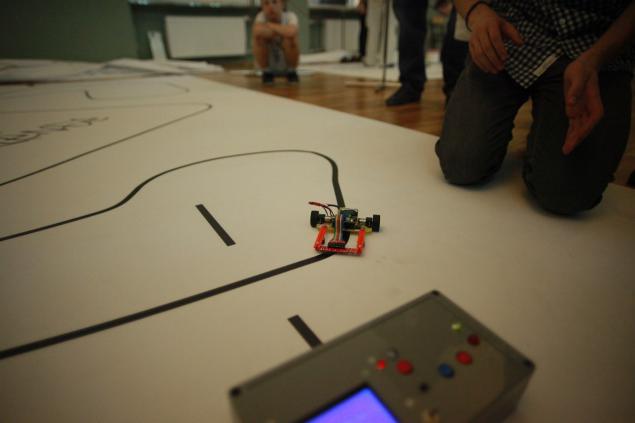
13.00: On the P controller at 28% the speed of the boat is fully passed the test track! Here and get the robot in one day. B>
Conclusion
-In starts at 15:30, so it was time to improve results. I wrote a PD, then Kostya (my partner) took over the initiative and enthusiastically began to debug and improve the program. "Hymn" of the robot, we chose the song Muse - Madness, when it sounded occurred debugging. During the first attempt to track the robot traveled for 16 seconds, during the second and last for 14.25, the same result as the winner. But he had better first try than ours, so we took II place.

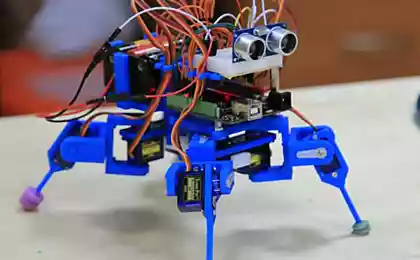
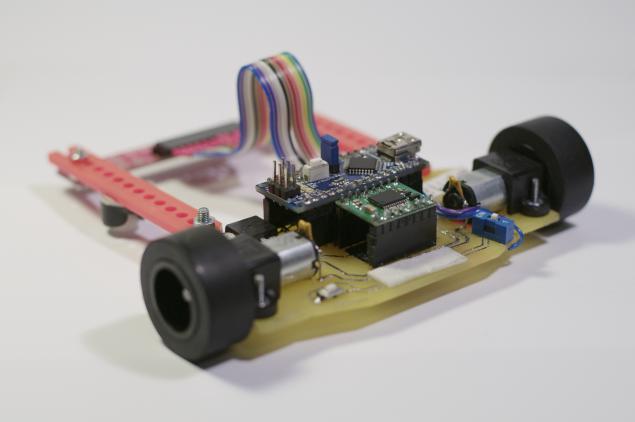
And, in fact, photographs of the robot:
Video-In: i>
Source: habrahabr.ru/post/224171/
Introduction
It turned out that this season I was seriously engaged in only micro-sumo: started doing the robot in July 2013, graduated from the end of March 2014. Competitions are robosumo usual, but the mass of the robot must not exceed 100 grams, and the robot in the starting position should be placed in a cube 5 cm * 5 cm * 5 cm. He exhibited his only one competitions 6 April, where he was the only one robot.
Black Python competes with double-sided adhesive tape. I>
As in St. Petersburg at the moment only 2 robot of this class, in the May competition did not include this kind of competition. And since the act would, I decided to make a quick layntreysera, robot motion along the line, good for 5 years was their hobby robotics pieces 10 (excluding made from Lego).
Design
Since the task was to make the robot in shortest terms, it had to resort to a ready solution: Freeduino Nano, modular motor driver and finished strap sensors. Ability to start the robot only appeared on Saturday in 12 hours.
14.00: bullet in Micronika for missing parts!
15.00: Phew, came home with all the details please.
15.30: Ate, and can be designed. I really wanted to make a beautiful robot, but the presence of modular components and a limited amount of time has reduced it all to nothing, so think long on the design and layout, I did not.
18.30: That's the final version of the wiring (there were 2 more).

Making design
Initially the plan was simple: LUT - & gt; sawing boards - & gt; Drilling - & gt; Soldering - & gt; mounting of motors and sensors. But when things go without adventures? There was only a matte paper that Lut is not comme il faut, parts scattered on the packages and boxes, etc.
18.35: Well, damn it, not extinct.
18.40: Well bliin, toner does not come, will have more time to cut PCB.
18.50: Phew, now translated.
19.00: etched, now Peel drills.

19.10: drank.
19.15: Soldering, brazing and soldering again.
19.30: Ahh! Quick-disconnect couplings solder unreal, that I would once again made tracks loot from the same side as the elements.
20.20: Oh well, it's all just below perekinu postings.
20.40: Oh her, the stabilizer is working, not even hot. You can take a break for a pizza.
21.10: It's time to continue to make the bot.
21.30: And where motor driver?
21.50: Found. Now need a neat loop for connection to sensors Dunya.

22.20: Okay, now the motors. 22.30: Why fixing cracked?

22.40: Hmm, what to do from the rack sensor?
23.10: Okay, this is a problem tomorrow.
23.25: Shorty. It is necessary to rewire a bit.
23.30: rewire. Works, not heated.
23.50: Come on, Arduino, zaprogaysya already!
00.30: Do not put draysery for her, well, what can we do. Tomorrow, on the other changed. And now we need to get together to compete and have a sleep.

9:30: He came to the competition.
10.00: register, took a fancy box (thickness of lines 1, 5 cm)

12.00: Anything with the design finished, NASU shift, put the rack, scraper stuck.
12.30: Looked at the other, and you can start progat.
13.00: On the P controller at 28% the speed of the boat is fully passed the test track! Here and get the robot in one day. B>
Conclusion
-In starts at 15:30, so it was time to improve results. I wrote a PD, then Kostya (my partner) took over the initiative and enthusiastically began to debug and improve the program. "Hymn" of the robot, we chose the song Muse - Madness, when it sounded occurred debugging. During the first attempt to track the robot traveled for 16 seconds, during the second and last for 14.25, the same result as the winner. But he had better first try than ours, so we took II place.

And, in fact, photographs of the robot:



Video-In: i>
Source: habrahabr.ru/post/224171/