1519
如何使机器人24小时
当类别在计划说话,不会和指日可待的考试。 I>
简介 B>
原来,在这个季节,我是认真从事仅微相扑:开始做机器人2013年7月,从3月到2014年结束的比赛是robosumo平常毕业,但机器人的质量不得超过100克,并且在起始位置的机器人应放置在5厘米的立方体* 5厘米* 5厘米。他表现出他唯一的一场比赛在4月6日,他在那里是唯一的机器人。
黑蟒竞争对手双面胶带。 I>
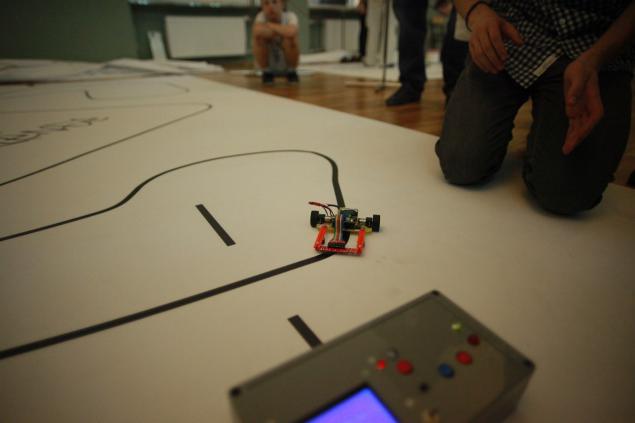
在圣彼得堡,目前只有2机器人这一类的,五月的竞争中并没有包括这种类型的比赛。而作为这样说我决定做一个快速layntreysera,机器人沿线移动,好了5年的爱好机器人,有10个(不包括乐高积木制作的)。
设计 B>
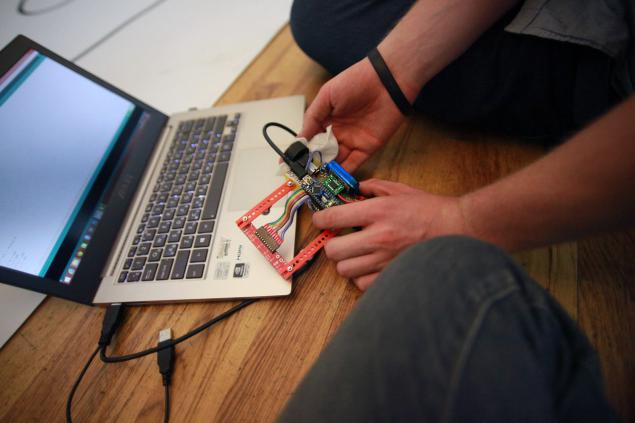
由于任务是使在最短的术语机器人,它不得不求助于现成的解决方案:Freeduino纳米,模块化发动机驱动和成品带传感器。能够启动机器人只出现在周六的12点钟。
14.00:子弹Micronika缺失的部分!
15.00:唷,我回到家的所有细节请。
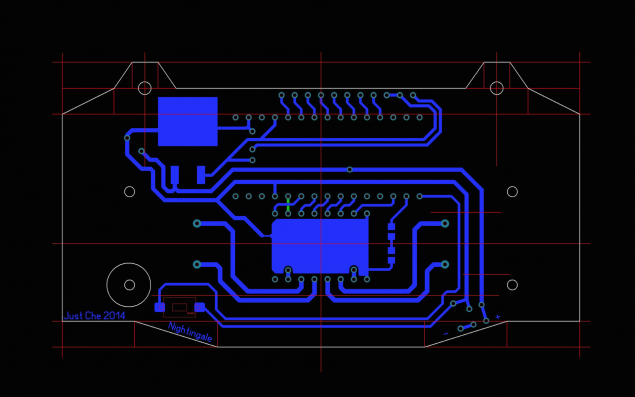
15.30:吃,和可被设计。我真的很想做一个漂亮的机器人,但模块化组件和时间有限的存在已经说明了一切化为乌有,只要想着设计和布局我没有。
18.30:这是最后的布局(有2个)
。
建设的生产
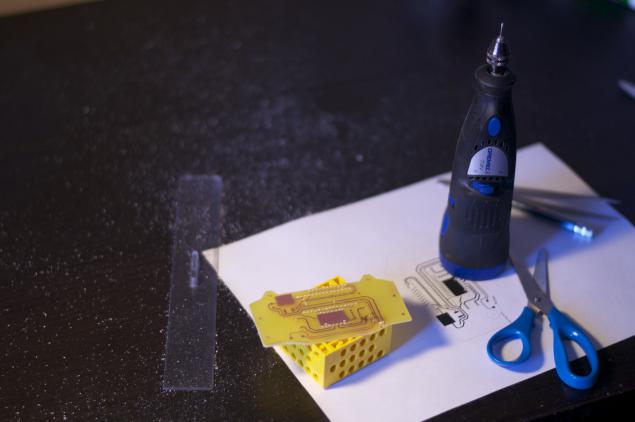
起初的计划很简单:LUT - >锯板 - >钻孔 - >焊接 - >装载马达和传感器。但是,当它完成,而不冒险?世界上只有一个亚光纸的战利品没有COMME IL faut,零件散包和箱子等。
18.35:嗯,该死的,没有灭绝
。 18.40:嗯bliin,碳粉不来,就会有更多的时间来削减PCB
。 18.50:唷,现在翻译。
19.00:蚀刻,钻现在皮尔
19.10:喝醉了。
19.15:焊接,钎焊和焊接一次。
19.30:啊!快速断开接头焊接不真实的,我又做了同一侧的元素轨道战利品。
20.20:是啊,这一切,仅低于perekinu帖子。
20.40:哦,它工作稳定,甚至不热。你可以把比萨饼休息。
21.10:现在是时候继续机器人。
21.30:在哪里驱动引擎?
21.50:发现。现在需要一个整洁的电缆连接到传感器敦雅。
22.20:好了,现在的电机。 22.30:为什么假球破解?
22.40:嗯,从做什么灵气的传感器
23.10:好吧,这是明天的问题
。 23.25:矮个子。有必要重新连接一下。
23.30:焊接。作品,不加热。
23.50:来吧,Arduino的,zaprogaysya了!
00.30:不要把draysery它,以及如何做。明天将改变到另一个。现在我们需要扎堆竞争,并得到一些睡眠。

9:30:他来到比赛
。 10.00:登记,正是看中了该领域(线宽1,5厘米)

12.00:完成所有的设计,取而代之NASU,放架,刮板卡住。
12.30:我看了看其他的,你就可以开始progat。
13.00:在以28%的速度船的P控制器完全通过测试赛道! 在这里,并获得所述机器人在一天。 B>
结论的
- 在开始于15:30,所以这是时间来提高成绩。我写的AP,然后克斯特亚(我的伙伴)接管了主动,以极大的热情开始调试和改进方案。 “赞美诗”的机器人,我们选择了一首歌曲的缪斯 - 疯狂,当它响起发生的调试。在第一次尝试跟踪机器人驱车16秒时的14.25的第二个和最后一个,相同的结果作为优胜者。但他的第一次尝试比我们的好,所以我们采取了第二位。

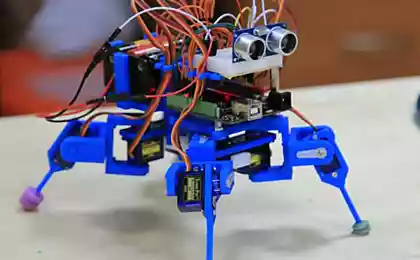
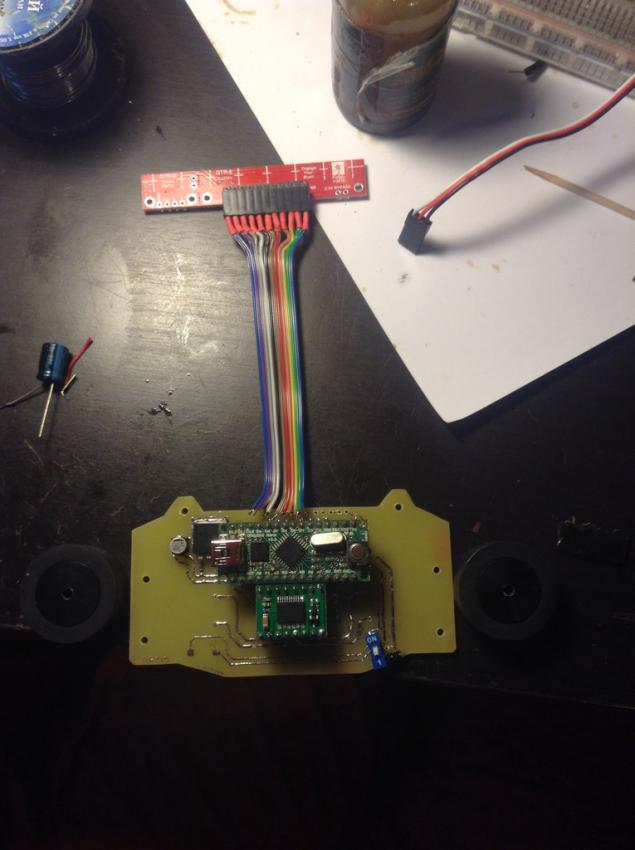
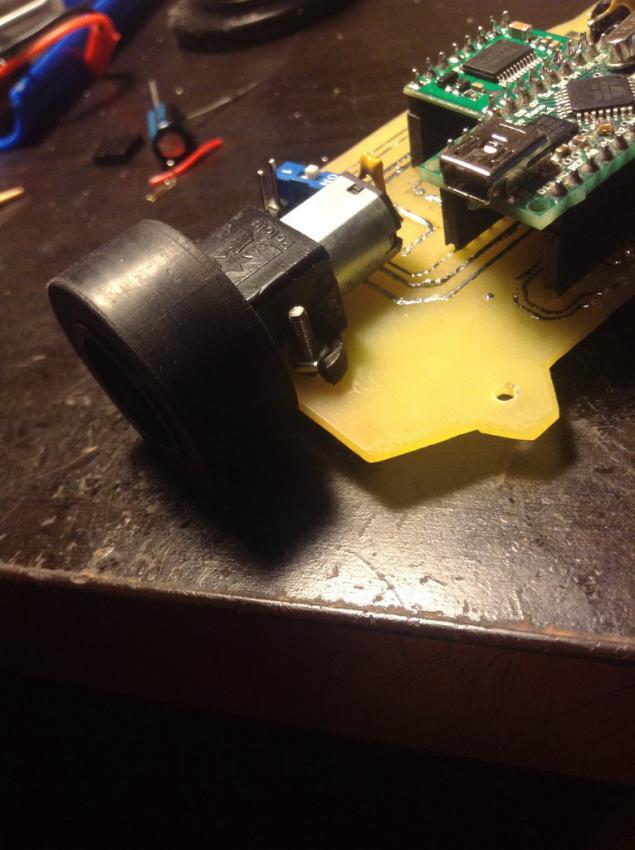
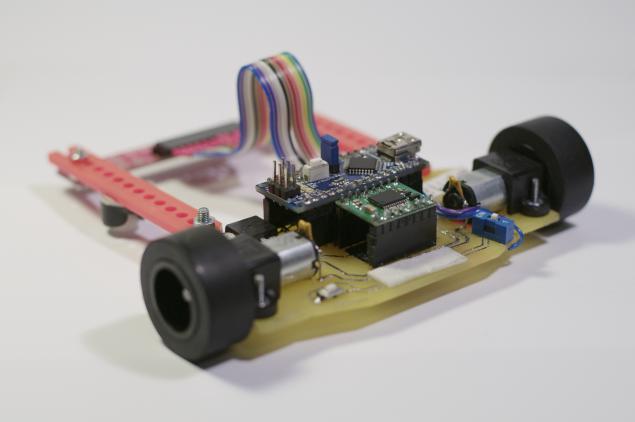
而且,实际上,机器人图片:
视频到来: I>
来源: habrahabr.ru/post/224171/
简介 B>
原来,在这个季节,我是认真从事仅微相扑:开始做机器人2013年7月,从3月到2014年结束的比赛是robosumo平常毕业,但机器人的质量不得超过100克,并且在起始位置的机器人应放置在5厘米的立方体* 5厘米* 5厘米。他表现出他唯一的一场比赛在4月6日,他在那里是唯一的机器人。
黑蟒竞争对手双面胶带。 I>
在圣彼得堡,目前只有2机器人这一类的,五月的竞争中并没有包括这种类型的比赛。而作为这样说我决定做一个快速layntreysera,机器人沿线移动,好了5年的爱好机器人,有10个(不包括乐高积木制作的)。
设计 B>
由于任务是使在最短的术语机器人,它不得不求助于现成的解决方案:Freeduino纳米,模块化发动机驱动和成品带传感器。能够启动机器人只出现在周六的12点钟。
14.00:子弹Micronika缺失的部分!
15.00:唷,我回到家的所有细节请。
15.30:吃,和可被设计。我真的很想做一个漂亮的机器人,但模块化组件和时间有限的存在已经说明了一切化为乌有,只要想着设计和布局我没有。
18.30:这是最后的布局(有2个)
。

建设的生产
起初的计划很简单:LUT - >锯板 - >钻孔 - >焊接 - >装载马达和传感器。但是,当它完成,而不冒险?世界上只有一个亚光纸的战利品没有COMME IL faut,零件散包和箱子等。
18.35:嗯,该死的,没有灭绝
。 18.40:嗯bliin,碳粉不来,就会有更多的时间来削减PCB
。 18.50:唷,现在翻译。
19.00:蚀刻,钻现在皮尔

19.10:喝醉了。
19.15:焊接,钎焊和焊接一次。
19.30:啊!快速断开接头焊接不真实的,我又做了同一侧的元素轨道战利品。
20.20:是啊,这一切,仅低于perekinu帖子。
20.40:哦,它工作稳定,甚至不热。你可以把比萨饼休息。
21.10:现在是时候继续机器人。
21.30:在哪里驱动引擎?
21.50:发现。现在需要一个整洁的电缆连接到传感器敦雅。

22.20:好了,现在的电机。 22.30:为什么假球破解?

22.40:嗯,从做什么灵气的传感器
23.10:好吧,这是明天的问题
。 23.25:矮个子。有必要重新连接一下。
23.30:焊接。作品,不加热。
23.50:来吧,Arduino的,zaprogaysya了!
00.30:不要把draysery它,以及如何做。明天将改变到另一个。现在我们需要扎堆竞争,并得到一些睡眠。

9:30:他来到比赛
。 10.00:登记,正是看中了该领域(线宽1,5厘米)

12.00:完成所有的设计,取而代之NASU,放架,刮板卡住。
12.30:我看了看其他的,你就可以开始progat。
13.00:在以28%的速度船的P控制器完全通过测试赛道! 在这里,并获得所述机器人在一天。 B>
结论的
- 在开始于15:30,所以这是时间来提高成绩。我写的AP,然后克斯特亚(我的伙伴)接管了主动,以极大的热情开始调试和改进方案。 “赞美诗”的机器人,我们选择了一首歌曲的缪斯 - 疯狂,当它响起发生的调试。在第一次尝试跟踪机器人驱车16秒时的14.25的第二个和最后一个,相同的结果作为优胜者。但他的第一次尝试比我们的好,所以我们采取了第二位。

而且,实际上,机器人图片:



视频到来: I>
来源: habrahabr.ru/post/224171/