1679
从机器视觉控制传输逻辑avtorobota
A.Zhukovsky,S.Usilin,V.Postnikov H6>今天我们要谈新的项目,该项目刚刚开始一年多前在部门“认知技术”MIPT。
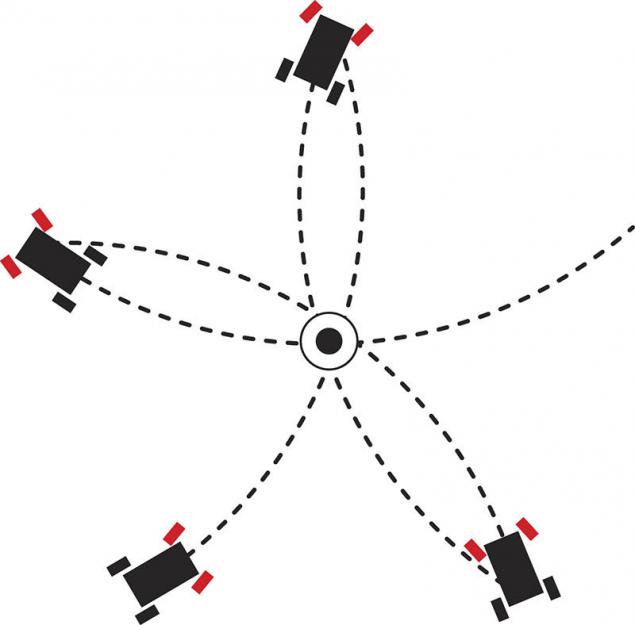
它包括在创建一个机器视觉系统,机器人 - 所述车辆(图1 的),这是一个实时视频流应处理来识别周边场景来检测对象,并生成可调节变量,针对该问题的解决方案。


图。 1 H6>在这里,我们是不是要重新创建的道路现场的实际情况,消除了小尺寸造型的魅力。
对于初学者来说,简单的例子,我们要制定出系统的基本架构组件(基地接收的视频流和分布式处理的微型计算机和摄像机的组合,为系统级芯片(SoC)的原型),潜在有用的解决更复杂的问题。<无线电通信/>
我们会将教机器人沿走廊移动,以检测简单的对象,例如,为橙色交通锥。我们面临的挑战是,他可以开车到该对象并停止。然后决定与球可打。在当前的版本中,如果球是在视场照相机,机器人检测球加速和推他的保险杠。如果球离开的照相机视场,机器人开始寻找他。
视频上的青年科学家MIPT,
秋季会议上的报告中中弹
就在主楼的走廊 H6>现在我们教机器人通过“蛇”的时候。这个练习能够评估的质量管理体系,并从版本到另一个版本的进度。并与手动控制用的人员的质量进行比较。
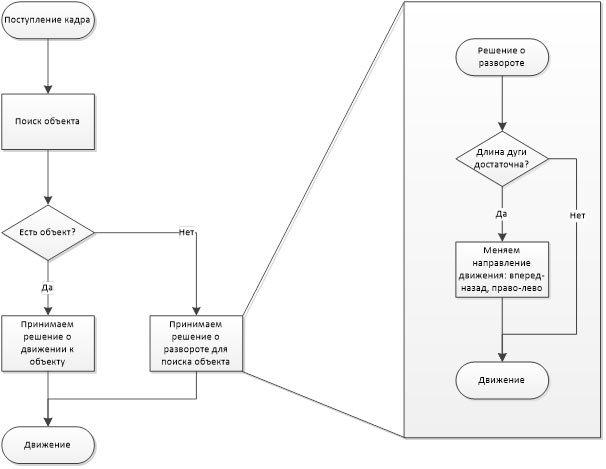
最初,我们的机器人仅包含控制计算机,照相机,而事实上,该底盘。该模型是一个运动型多功能车于Traxxas斜线2WD在1:10进行。 (图2 ,图3 )


图。 2于Traxxas斜线2WD H6>控制器机箱基于Arduino的纳米制成,但实际上它仅使用一个微控制器ATmega32的。
过了一会儿,我们增加了一个前视图声纳监测到障碍物的距离 - 简单地说,机器人还没有打在保险杠角落和墙壁。
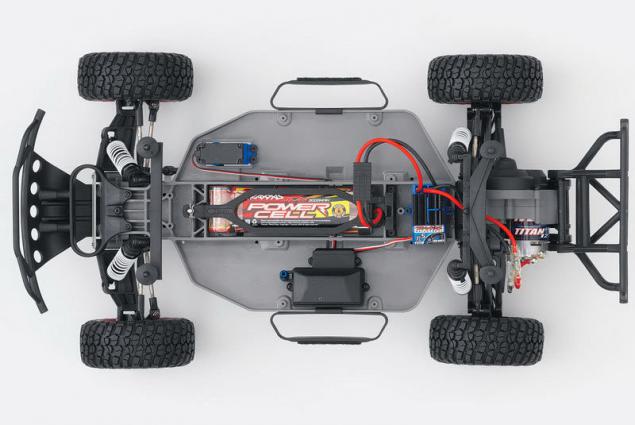

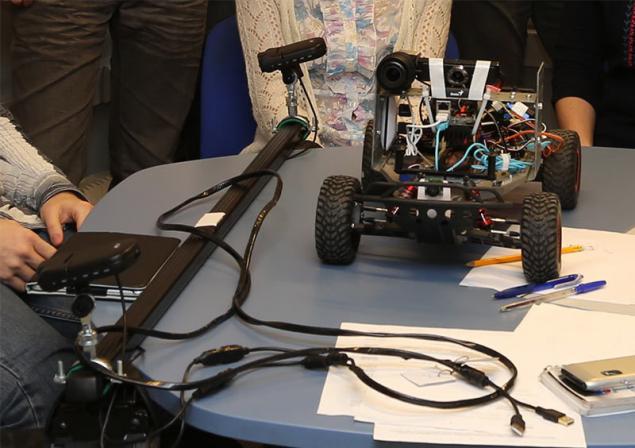
图。 3于Traxxas斜线2WD H6>如果机器人的第一个版本播放通过HTTP视频回,并产生控制信号在桌面上进行的,那么在当前版本2.0(显示在视频)整个循环是封闭的木板上,主要负担落在了视频处理在小型机Odroid U2。 (图4-1 )
除了电脑设备在2.0版本中包括:
- 在机器人控制单元(图4,-2);
- 摄像机罗技HD Pro的C920 /全国联保WideCam 1050(可用于几乎任意的网络摄像头)(图4,3); LI>
- 的Wi-Fi适配器华硕USB-N10(图4,-4);
- USB集线器(图4-5)
- 声纳LV -MAXSONAR-EZ2(图4-6)

图。 4 H6>设备功能的机器人控制包括:
<01> - 执行团队经理的电脑 B>:
- 行长PWM信号的,

声纳(8通道), 霍尔传感器, 电池电压传感器(ADC); LI> UL> 保护机器人 B>:
在正面声纳急停, 停止控制信号丢失。 LI> UL> LI> OL>