1685
Avtorobota Lógica de visión artificial para el control de la transmisión
A.Zhukovsky, S.Usilin, V.Postnikov h6> Hoy queremos hablar sobre el nuevo proyecto, que se inició hace poco más de un año en el departamento de "tecnologías cognitivas" MIPT.
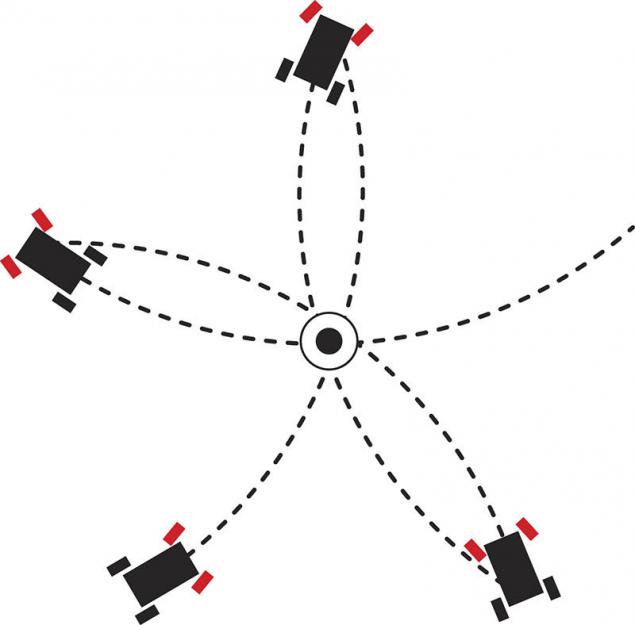
Consiste en la creación de un sistema de visión artificial, el robot - el vehículo (. Fig 1 ), que es un flujo de vídeo en tiempo real debe procesar para reconocer la escena circundante para detectar objetos y generar la variable manipulada, dirigida a la solución del problema.


Figura. 1 h6> Aquí no estamos tratando de recrear las condiciones reales de la escena de carreteras, eliminando todo el encanto de un modelado de tamaño pequeño.
Para empezar, ejemplos simples, nos gustaría trabajar en los componentes básicos de la arquitectura del sistema (base que recibe el flujo de video y procesamiento distribuido en una combinación de mini-ordenadores y cámaras de vídeo, como el prototipo de sistema-en-un-chip (SoC)), potencialmente útiles para la solución de problemas más complejos.
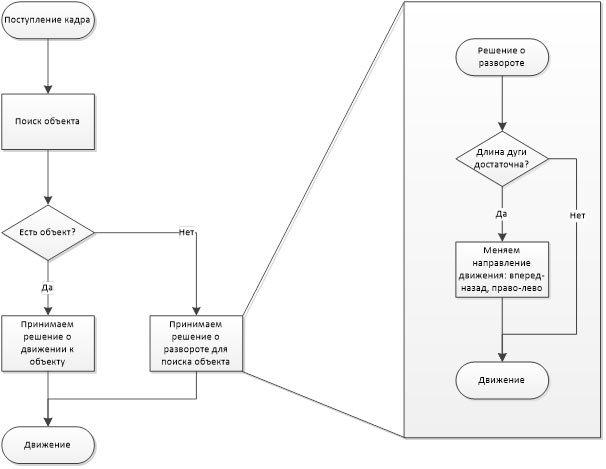
LE enseñado el robot para moverse a lo largo del corredor y para detectar objetos simples, como un cono de tráfico de naranja. El reto era que podía conducir hasta el objeto y se detendrá. Y entonces decidió jugar con la pelota. En la versión actual, si la pelota está en el campo de la cámara de vista, el robot detecta la bola acelera y empuja su parachoques. Si el balón sale del campo de visión de la cámara, el robot comienza a buscarlo.
Video Rodado durante un informe sobre la conferencia de otoño de los jóvenes científicos MIPT,
justo en el pasillo del edificio principal h6> Ahora nos enseñan el robot a pasar "serpiente" en el momento. Este ejercicio permite evaluar el sistema de gestión de calidad y su evolución desde una versión a otra. Y comparar con la calidad del control manual con la persona.
Inicialmente, nuestro robot contenía sólo el control de la computadora, la cámara y, de hecho, el chasis. Este modelo es un vehículo utilitario deportivo Traxxas Slash en 2wd hecho en 1:10. ( Fig. 2 , Fig. 3 )


Figura. 2 Traxxas Slash en 2wd h6> chasis del controlador se realiza con base en la nano Arduino, pero en realidad sólo se utiliza un microcontrolador ATmega32.
Un poco más tarde, hemos añadido un sonar diagrama frontal para controlar la distancia hasta el obstáculo - en pocas palabras, el robot no ha peleado en las esquinas de los paragolpes y las paredes.
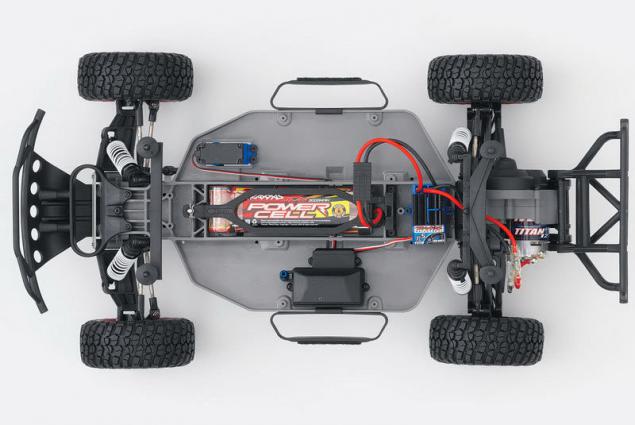

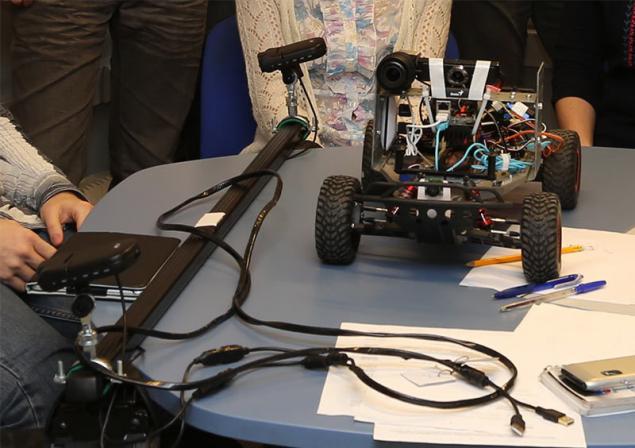
Figura. 3 Traxxas Slash en 2WD h6> Si la primera versión del robot para transmitir vídeo a través de HTTP atrás y señales de control de generación realizada en el escritorio, a continuación, en la versión actual 2.0 (que se muestra en el vídeo) de todo el ciclo se cierra a bordo, con la carga principal cayó en el procesamiento de vídeo en minicomputadora U2 ODROID. ( Fig. 4 -1 )
Además de equipo de cómputo en la versión 2.0 incluyen:
- la unidad de control del robot (Figura 4, -2.);
- Cámara de video de Logitech HD Pro C920 / Genius WideCam 1050 (se puede utilizar cámaras web en prácticamente arbitraria) (Fig 4, 3.); ASUS
- Wi-Fi-adaptador USB-N10 (Figura 4, -4.);
- USB-cubo (Fig. 4 -5)
- sonar LV -MAXSONAR-EZ2 (Fig. 4 -6)

Figura. 4 h6> para el dispositivo cuenta con un control de robot incluyen:
- equipo Team Manager Implementación
- la formación de Gobernadores de la señal PWM,
- Gestión de la carga externa (7 canales);

sonares (8 canales), El sensor Hall, sensor de voltaje de la batería (ADC); robot protección parada de emergencia en el sonar frontal, señal de control de detención se pierde.