1279
El sistema de control de mini-dirigible
Buenas tardes, querido lector, se le da la atención un proyecto para desarrollar un mini-dirigible de control táctil del sistema.
La tarea de la gestión es el movimiento de la aeronave en la línea. También se implementó un sistema de control remoto sencillo.
El objeto del control es un mini-dirigible diseñado para EIM de Presidencia, Tsure.
Figura 1 - Vista general de la mini-dirigible
.
El proyecto tiene como objetivos: desarrollar un sistema de visión para la detección de una línea (trayectoria de movimiento); el desarrollo del controlador supuesto que tiene en cuenta los factores de la posición de la línea y el ángulo de la línea relativa a la aeronave; ajustador de altura del desarrollo; Desarrollo de un sistema de control remoto.
1. Análisis de tareas y de trabajo h4> Desarrollar un control táctil del sistema se basa en un mini-dirigible diseñada en el Departamento de EIM.
La tarea de la gestión es el movimiento de la aeronave en la línea. También se implementó un sistema de control remoto sencillo.
El objeto del control es un mini-dirigible diseñado para EIM de Presidencia, Tsure.
Figura 1 - Vista general de la mini-dirigible
.
El proyecto tiene como objetivos: desarrollar un sistema de visión para la detección de una línea (trayectoria de movimiento); el desarrollo del controlador supuesto que tiene en cuenta los factores de la posición de la línea y el ángulo de la línea relativa a la aeronave; ajustador de altura del desarrollo; Desarrollo de un sistema de control remoto.
1. Análisis de tareas y de trabajo h4> Desarrollar un control táctil del sistema se basa en un mini-dirigible diseñada en el Departamento de EIM.
Mini dirigible incluye un shell en los componentes público, a saber, una variedad de globos de papel de aluminio.
La parte de hardware de la mini-dirigible consiste
- - pi frambuesa SBC;
- - Wide Web Cámaras Genius WideCam 1050;
- - ultrasónica altura del sensor HC-SR05;
- - dos motores eléctricos;
- - empuje servo deflexión;
- - el subsistema de energía
Dirigible motores tienen la capacidad de fijar la velocidad máxima de rotación en 3200. / Min. Motores 7.4 voltios de tensión de funcionamiento. Los motores están separados del centro de la aeronave a 25 cm., Y están en el punto más bajo de la aeronave.
2. Vision System h4>
2.1. Diagrama de bloques de un sistema de visión h5>
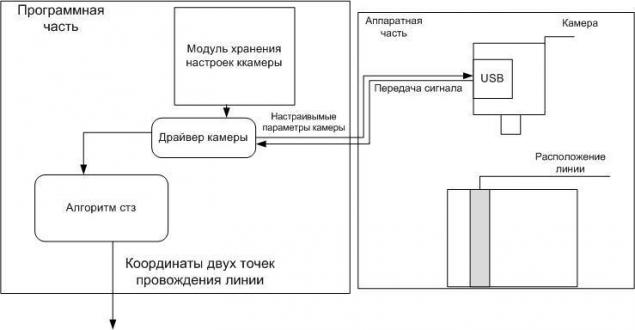
Figura 2 - Diagrama de bloques del sistema de la visión técnica mini-dirigible
.
Sistema de visión se compone de piezas de hardware y software. La parte de hardware está relacionado con la parte de software de una conexión por cable, que ya pasó el formato MJPG señal generada.
En la parte de hardware incluye una cámara web.
Como parte del programa se incluyen:- - cámara controlador para ajustes de la cámara de trabajo formato de imagen de vídeo y MJPG;
- - módulo de procesamiento de imágenes
2.2.. Desarrollo de circuito funcional h5> A la vista del método de tratamiento seleccionado y algoritmo para determinar la ubicación de la línea (que se discutirá en el siguiente capítulo bajo) fueron identificados en la implementación del software de las siguientes subtareas:
- - configurar los parámetros de la cámara interna;
- - obtener una imagen con la cámara;
- - convertir el formato de imagen de MJPG en formato de color HSV;
- - para organizar la búsqueda por la intersección de la coincidencia de color;
- - aplicar el algoritmo para la determinación de las coordenadas del punto de intersección,
- - filtrando no señal útil;
- - poner en práctica la unidad de integración FCZ con dirección regulador de potencia.
2,3. Los algoritmos h5> Como usted sabe, cualquiera de los dos puntos en el espacio se pueden colocar directamente. En este caso, antes de que el sistema de visión mini-dirigible busca definiciones líneas establecidas. La primera etapa de procesamiento de la imagen será la búsqueda de estos dos puntos, que estaba echado a nuestra línea.
Identificar áreas de interés en nuestra imagen para encontrar estos puntos. Área de ubicación óptima de interés será lagunas Mezhuyev tercera parte vertical del marco y 2/3. como se muestra en la Figura 4, las líneas azules.

Figura 3 - zona de ubicación óptima de interés
.
Criterio de área de ubicación óptima de interés es el hecho de que la parte inferior de la zona de interés es perpendicularmente hacia abajo del mini-dirigible, y la parte superior no está en el borde del marco, lo que minimiza la distorsión del área de la imagen.
La altura de cada una de las zonas es de 10 píxeles.
El punto de intersección con la línea definida por el color del píxel correspondiente especificado. El espacio de color HSV del sistema de visión.
Fase 2 del algoritmo en cada área de interés.
1. Determinación de un color predeterminado se produce en la matriz cuya anchura es la anchura de la trama recibida desde la cámara. Cada elemento de la matriz es un valor medio de 10 píxeles en la zona de la columna de interés. Por lo tanto un promedio de ruido de color proveniente de la cámara. La matriz tiene 3 filas, cada una de las cuales corresponde a los canales de HSV. En la salida se obtiene una matriz unidimensional en la que el valor de "1" indica la dirección de píxel correspondiente a un color dado, el valor "0" indica la dirección de píxeles que no coinciden con un color específico.
& lt; código & gt; for (x = 0; x & lt; ancho; x ++) {offset = x * nChannels; para (y2 = 35; y2 & lt; 46; y2 ++) {uchar * = datos (uchar *) (HSV & gt; imageData del + y2 * paso); r = datos [compensados + 2]; g = datos [desplazamiento + 1]; b = datos [compensación]; h [y2-35] = b; s [y2-35] = g; v [y2-35] = r; } H [10] = (h [0] + h [1] + h [2] + h [3] + h [4] + h [5] + h [6] + h [7] + h [8 h] + [9]) / 10; s [10] = (s [0] + s [1] + s [2] + s [3] + s [4] + s [5] + s [6] + s [7] + s [8] + s [9]) / 10; v [10] = (v [0] + v [1] + v [2] + v [3] + v [4] + v [5] + v [6] + v [7] + v [8] + V [9]) / 10; if ((h [10] & lt; h1 & amp; & amp; h [10] & gt; h2) & amp; & amp; (v [10] & gt; ss) & amp; & amp; (s [10] & gt; vv)) {st [x] = 1;} else {st [x] = 0;} & lt; / código de & gt; pre>
2. Determinación de los límites izquierdo y derecho de la zona de intersección.
De acuerdo con la matriz de entrada se llena dos matrices de la misma dimensión. Llame a ellos st1 y ST2. Llenado algoritmo implementado arrays ciclo en el que algunos aumentos variables linealmente si el elemento de la matriz de entrada es 1, y disminuye exponencialmente cuando el elemento considerado es igual a 0, y se registra en el siguiente elemento de la matriz st1. Para formar el ST2 matriz, la matriz de entrada se ve desde el extremo. Como resultado, las matrices ST1 y ST2 pueden ser representados gráficamente como sigue (Fig. 5)
Figura 5 - Representación gráfica de arrays st1 y st2
.
Señal útil es la más extensa área de definición de color. El ruido es pequeño falsos positivos, que pueden observarse en la figura 7. El registro coordenadas x máximo elemento gráfico rojo (ST1), es el lado derecho de una línea a través de la zona de interés. La coordenada x del elemento de máxima de los gráficos azules (ST2), es el lado izquierdo de la línea a través de la zona de interés.
Listado
& lt; código & gt; doble suma = 1; doble sum2 = 1; for (x = 0; x & lt; ancho; x ++) {if (st [x] == 1) {suma = suma + 1; st1 [x] = suma;} else {suma = suma / 1.05; st1 [x] = suma;} if (st [ancho x] == 1) {sum2 = sum2 + 1; st2 [ancho x] = sum2;} else {sum2 = sum2 / 1.005; st2 [ancho x] = sum2} } & lt; / código de & gt; pre>
Después de la formación de matrices st1 y ST2, son los elementos máximas de la matriz, y el centro calculado de la zona de intersección. Mediante la aplicación de los pasos descritos a la segunda zona de cruce, en la salida, tenemos coordenadas de puntos a través del cual el derramamiento.
La aplicación de manera común definir la zona de confianza en la siguiente trama, como en la instalación anterior no se utilizó, ya que tal método y mostró resultados aceptables de ruido en los parámetros de salida. También el uso de este método no disminuiría el uso de CPU, ya que se trata sólo con la enumeración múltiple de dos matrices con un ancho de 176 píxeles, la resolución de la totalidad de la imagen es de 176x144 píxeles.
3. Regulador de dirección h4>
3.1. Diagrama de bloques del controlador en el sistema de control h5>
Figura 4 - Diagrama de bloques de la dirección del controlador
.
Implementación de software consiste en:
- - controlador difuso;
- - línea de módulo de cálculo de pivote matemática;
- - software Shimano
La implementación de hardware consta de:
- - Los conductores del motor L293DNE;
- - a la izquierda y derecha del motor eléctrico
El software de aplicación se debe a la ausencia en Shima utiliza hardware pi SBC Frambuesa Shima.
Controlador del motor se utiliza para amplificar la señal PWM.
3.2. Diseño del controlador difuso. H5>
3.2.1. Definición de entradas y salidas del sistema creado. H6> En cuanto a la aprobación precisa mini-dirigible en la línea para ser considerado como desviaciones de la línea del eje de la aeronave, y la rotación alrededor del mismo eje, respectivamente, los parámetros de entrada del controlador para ajustar la desviación variable ( OFF) y la rotación (PIW). Variable de salida del regulador serán los parámetros de la señal PWM de salida como un porcentaje. Los efectos de las variables de salida en el motor izquierdo se designa como (LEV), el motor derecho, respectivamente (normas)
3.3.2. Tarea para cada una de las variables de entrada y de salida de la función de pertenencia con términos h6> Accesorios términos de salida a la izquierda y derecha del motor tendría que ser establecido, calculado parámetros no lineales del motor PWM impacto relativo de CC. Pero a medida que la velocidad de vuelo de la aeronave sugieren pequeños motores desviación lineales, los términos se establecieron para un motor ideal, con característica lineal absoluta.
Figura 5 - Baños de variables de salida LEV y normas
.
Las variables de entrada son desviaciones desde el eje longitudinal de la línea dirigible y convierten la línea de este eje se obtienen como resultado del sistema de visión y un cálculo matemático del ángulo del módulo, que tiene un rendimiento de distorsión de la cámara. Distorsión Indicadores cámara se puede poner en la posición OFF y Corredores plazo de entrada. Dado que la exactitud de posicionamiento y la trayectoria de salida de línea a requisitos, el rendimiento de la distorsión puede ser ignorada. En esta tarea, el término sintonizado cámara distorsión de la imagen o ajustar los términos en ellos. Thermae se cambiaron alrededor, que era una condición suficiente para el funcionamiento del sistema.
Figura 6 - OFF Therm y Corredores
.
3.2.3. Desarrollar la base de datos de reglas de inferencia implementado sistema difuso h6> Para desarrollar la base de reglas es necesario designar las variables lingüísticas (términos) fáciles de entender nombres.
Figura 7 - Designación del término
.
1 OFF - izquierda dura
. OFF 2 - a la izquierda
. OFF 3 -. Centro
OFF 4 - derecha
. OFF 5 - fuertemente hacia la derecha1 soporte -.. Izquierda dura
Párese 2 - izquierda
. Párese 3 - centro
. Párese 4 - derecha
. Párese 5 - duro a la derechaLEV 1 -.. Muy débil
LEV 2 - débilmente
. LEV 3 - medio
. LEÓN 4 -
fuertemente LEÓN 5 - muchoDERECHOS 1 -.. Muy débil
Regla 2 - débilmente
. DERECHOS 3 -. Medio
DERECHOS 4 -
fuertemente Regla 5 - muy plazo de comunicación En consecuencia, estos nombres, teniendo en cuenta que los motores controlados raznotyagom mini-dirigible establecen
. reglas de bloqueo:
SI OFF fuertemente a la izquierda, Leo es muy débil y las reglas son muy fuertemente.
Si está desactivada la izquierda, Leo es débil. Y la derecha de la fuerte
SI centro OFF, promedio Leo. Y medio derecho.
SI OFF derecha, Leo fortalezas y los derechos de los débiles.SI OFF fuertemente hacia la derecha, Leo es muy fuerte. Y la regla es muy débil.
SI Corredores fuertemente a la izquierda, Leo es muy débil. Y la regla es muy fuerte.
SI Sitúese a la izquierda, Leo es débil. Y la derecha de la fuerte
SI Soporte derecho, fortalezas Leo y los derechos de los débiles.
SI Corredores fuertemente hacia la derecha, Leo es muy fuerte. Y la regla es muy débilmente Se puede ver que para la variable de entrada en pie Sin promedios de conectividad. Esto es debido al hecho de que cuando la orientación correcta con respecto al eje longitudinal de la línea dirigible y las desviaciones de ella, el plazo medio de los motores de tracción los valores de entrada a la mitad de lo que está mal en esta posición de la aeronave.
En este sistema, el algoritmo es un algoritmo fuzzy Mamdani defuzzification.
Este algoritmo se describe varios ejecuta secuencialmente los pasos, con cada etapa sucesiva toma como entrada los valores obtenidos en el paso anterior.
3.2.4. Análisis del proceso del sistema difuso h6>
Para analizar la operación. Correlación se construyeron retratos regulador. En las siguientes figuras, el eje Y es la variable de entrada del soporte, variable de entrada del eje X a la posición OFF. El color del píxel corresponde a una variable de entrada para cada motor, -estadía mínima blanco, negro -. Max
Figura 8 - Correlación retratos valor de salida del sistema difuso para la izquierda y derecha del motor, la intersección de los retratos de correlación
.
La última cifra que ver el resultado del cruce de dos retratos de correlación con el uso de los píxeles seleccionados con el mismo color y la ubicación. A partir del resultado de la intersección se puede determinar bajo ninguna entrada de condiciones son los mismos valores de potencia del motor. Característica área cuadrado negro en los bordes dan las condiciones de frontera con la parte superior truncada.
A continuación se presentan los resultados de la simulación del controlador difuso en la línea de ubicación en el armazón marcada en rojo. El lado derecho del video, se puede ver los niveles de señal de PWM para el motor izquierdo y derecho, respectivamente. El Chisti izquierda encuentra artículos de higiene personal de entrada y de salida de términos.
4. Altura Ajustador h4>
4.1. Diagrama de bloques del controlador h5>
Figura 9 - Diagrama de bloques del ajustador de altura
.
Implementación de software consiste en:- controlador PI en lógica difusa;
- módulo de matemáticas cálculo de distancias;
- Software Shima;
La implementación de hardware consiste en un- Servo motores con vector de empuje;
- Sensor ultrasónico HC-SR05.
4.2. Diseño del controlador difuso h5>
4.2.1. Definición de entradas y salidas del sistema creado h6>
Parámetro de entrada del controlador difuso es el error de la altura deseada. La variable de salida es la parte proporcional del componente de PI del controlador híbrido.
La integral es la salida de todo el sistema y dio cuenta de lo acumulado variable que representa la posición del servo.
4.2.2. Tarea para cada una de las variables de entrada y de salida de la función de pertenencia con términos h6> Definir los términos de accesorios de salida, la distribución uniforme guiada por la superficie del término. La no linealidad de la salida del sistema difuso es definido por los términos de la variable de entrada.
Figura 10 - Theremin variable de salida OUT
Términos de error de entrada variables de la altura se muestra en la siguiente figura.
Figura 11 - Entrada de Baños altura variable
4.2.3. Desarrollar la base de datos de reglas de inferencia implementado sistema difuso h6> Para desarrollar la base de reglas, debe definir las variables lingüísticas (términos) fáciles de entender nombres.
Figura 12 - Designación plazo
Altura 1- fuerte desviación hacia abajo.
Altura 2 - desviación hacia abajo
. Altura 3 - ninguna desviación
. Altura 4 - deflexión hacia arriba
. Altura 5 fuerte desviación superiorSalida 1 - alta
positivo Salida 2 -
positivo Salida 3 - cero
Salida 4 -
negativo Salida 5 - alta negativo
La responsabilidad se estableció un plazo de enlace directo.
reglas de bloqueo:
SI Altura: desviación fuerte hacia abajo, la salida: alta
positivo SI Altura: desviación a la baja, salida:
positivo Si la altura: ninguna desviación, la salida: Cero
SI Altura: deflexión hacia arriba, la salida:
negativo SI Altura: fuerte desviación superior, entonces la salida: alta
negativo
5. Remote Control System h4> El sistema de control remoto se implementa en la gestión de la diferencia de los motores de par. Principios de ejecución tomados de los juegos de ordenador, cuando se da cuenta de presión suave desviación del par de torsión y liberar - un retorno suave, por lo que en cierta medida de lo posible para mantener la diferencia entre los motores de tracción.
Señalización de las pulsaciones del teclado a través de canal inalámbrico wi-fi a través de ssh, en el que la base de los hábitats terrestres (PC) interfaz de teclado se transmite a la computadora remota.
El envío de flujo de vídeo se realiza de la misma manera porque el protocolo ssh nos permite observar la pantalla de la máquina remota.
6. Estudio experimental del sistema h4> El sistema diseñado se ha investigado en el laboratorio. Sistema de visión detecta la posición de la línea y transmite las coordenadas de los puntos de intersección en la dirección de la unidad controladora.
Trabajo
sistema de visión
Span mini-dirigible
Estabilidad del sistema de ajuste de la altura y la dirección volvió alcanzar coeficiente de requisiciones. aumento proporcional de los efectos de salida de los sistemas difusos.
Figura 13 - Las disposiciones del vector de empuje y el dirigible sensor de altura. Especifica la altura de 80 cm.
Por los datos obtenidos, se observa una elevada relación señal ruido con un error en el sensor en el desarrollo del sistema no estaba usando la señal de filtro. La razón para no usar el filtro fue la prueba de la señal del sensor, que no mostró ninguna señal ruidosa grande del sensor.