1524
Як зробити роботу в 24 години
Коли категорія, в якій планується говорити не буде, а іспити не далеко.
Просування
У цьому сезоні я був серйозним про мікро-літо: У липні 2013 року закінчився кінець березня 2014 року. Змагання є загальним родом, але вага роботи не повинна перевищувати 100 грам, а сам робот в стартовому положенні повинен розташовуватися в кубі 5 см * 5 см * 5 см * 5 см * 5 см * 5 см. 6 квітня, де він був єдиним роботом.
Чорний Python змагається з двостороннім скотчем.
З тих пір в Санкт-Петербурзі на даний момент цей вид змагань не був включений. І з того, як я хотів би говорити, я вирішив зробити швидкий вкладиш, робот для переміщення по лінії, користь 5 років хобі робототехніки було 10 (не підрахунок зроблено з Лего).
Розробка дизайну
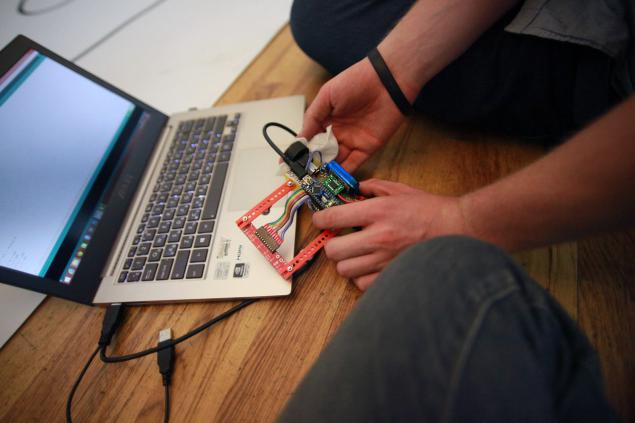
З моменту того, як завдання було зробити роботу якомога швидше, нам довелося вдатися до готового рішення: Freeduino Nano, модульний драйвер двигуна і готовий сенсорний бар. Уміння розпочати роботу тільки в суботу в 12 годину.
14:00: Булет у мікроніках за відсутніми деталями!
15:00: Пхукет, приїхав додому з усім, що йому потрібно.
15:30: Ви можете замовити дизайн. Я дуже хотів зробити гарний робот, але наявність модульних деталей і обмежена кількість часу, що заперечувала все це, тому я не думаю багато про дизайн і макет.
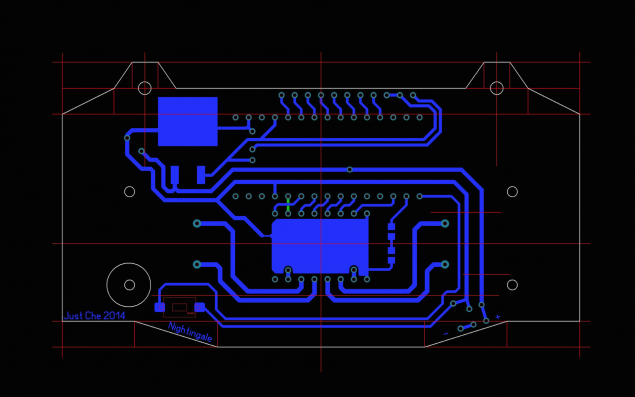
18:30: Ось остаточна версія проводки (від 2 більше).
Будівництво
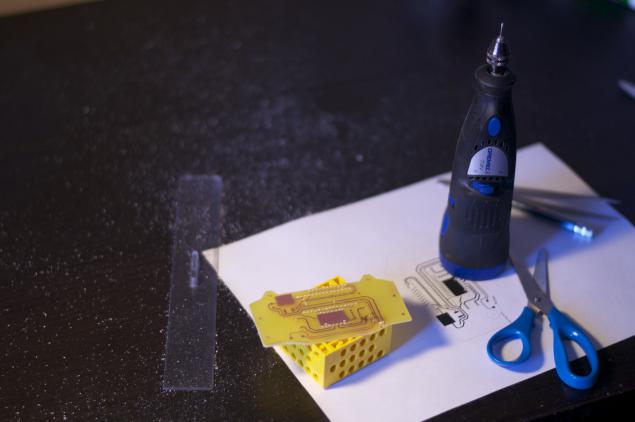
Спочатку план був простий: LUT -> щитовидної дошки -> свердління -> пайки -> кріплення двигунів та датчиків. Але коли все йде без пригод? Залишається тільки матовий папір, який не є Comilfo для LUT, Деталі розкидані в пакетах і коробках і т.д.
18.35: О, людина, я не перекладаю.
18.40: Ну, тонер не зійде, ми повинні знову зрізати текст
18.50: рагу, тепер передається.
19:00: Полювання, тепер я бурю.
19.10: Запобігання.
19.15: Скорочення, раціони та раціони знову.
19:30: Ах! Нереально вирізати паяльника так, щоб я знову зробив доріжок з такою ж сторінкою, як елементи.
20.20: Ох, це, я просто з'єдную дно.
20.40: О, її, робота стабілізатора, навіть не прогріваючи. Ми можемо взяти піцу.
21.10: Час тримати бота.
21:30: Де водій двигуна?
21:50: Знайдено його. Тепер потрібна акуратна сантехніка для підключення дюна до датчиків.
22.20: Гаразд, двигуни тепер. 22:30: Чому монтували тріщину?
22.40: Hmm, що ви робите сенсорні стійки з?
23.10: Гаразд, це проблема завтрашнього дня.
23.25: Короткий. Мені потрібно трохи поту.
23:30: Продаю це. Працює, не тепло.
23.50: Приїжджайте, Arduino приходять!
00:30: Немає драйверів для неї, так що ви можете зробити? Вже завтра. Тепер ми повинні піти на змагання і спати.

9:30: Я прийшов до змагання.
10.00: Зареєстровані, вибрані поле (товщина лінії -1.5 см)
570265 р.
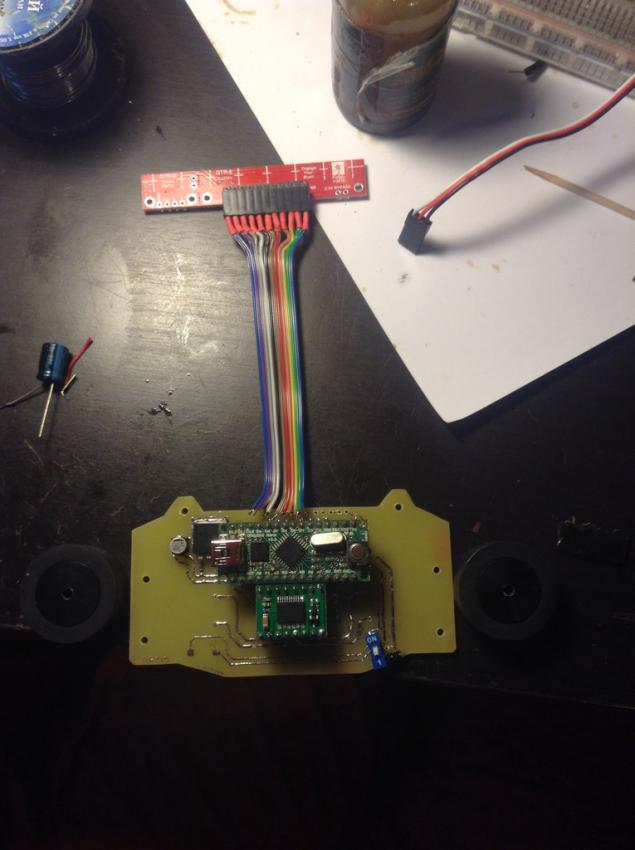
12:00: Все, готове з дизайном, змінено нано, встановіть рейки, приклеїли червоною стрічкою.
12:30: Якщо ви подивитеся на інші види, ви можете почати втратити.
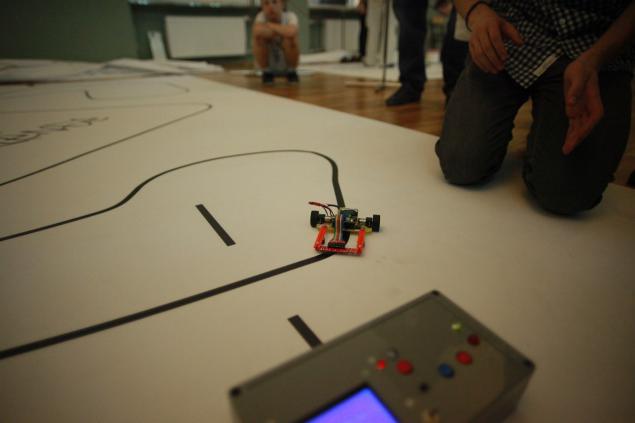
13:00: На П-регуляторі при швидкості 28%, бот повністю пройшов тестовий трек! Так виявився роботом в один день.
Висновок
Забіг стартував в 15:30, тому був час для поліпшення. Я написав PD, а потім Костянтин (мій-партнер) прийняв ініціативу і з великим ентузіазмом почали відхиляти і покращувати програму. "гімн" цього робота ми обрали пісню Muse - Madness, коли він озвучив відбілювання. Під час першої спроби робот пронизив доріжку 16 секунд, протягом другого і останнього в 14.25, той же результат, як переможець. Але він має краще, ніж наш, тому ми прийшли в другий.

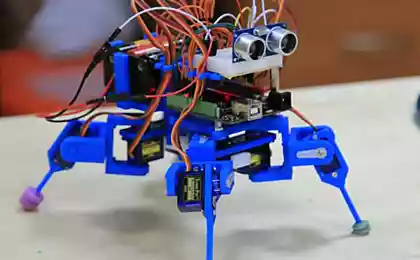
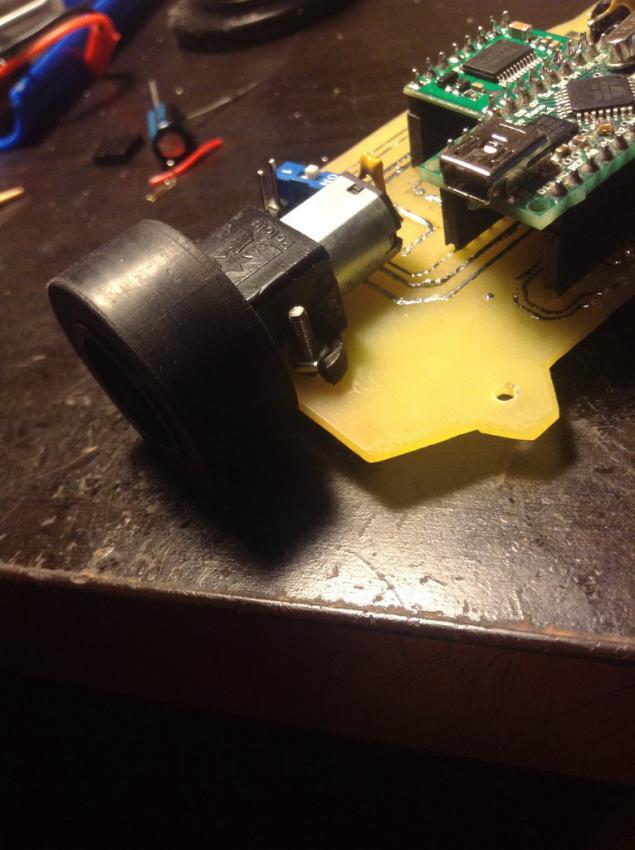
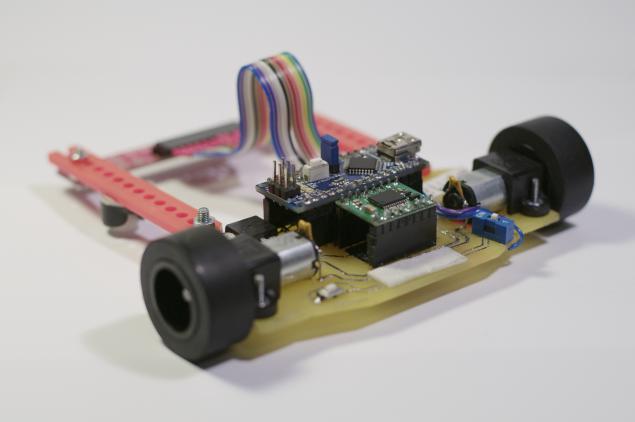
І насправді фото роботи:
 Р
Р
Перевірити відео:
Джерело: habrahabr.ru/post/224171/
Просування
У цьому сезоні я був серйозним про мікро-літо: У липні 2013 року закінчився кінець березня 2014 року. Змагання є загальним родом, але вага роботи не повинна перевищувати 100 грам, а сам робот в стартовому положенні повинен розташовуватися в кубі 5 см * 5 см * 5 см * 5 см * 5 см * 5 см. 6 квітня, де він був єдиним роботом.
Чорний Python змагається з двостороннім скотчем.
З тих пір в Санкт-Петербурзі на даний момент цей вид змагань не був включений. І з того, як я хотів би говорити, я вирішив зробити швидкий вкладиш, робот для переміщення по лінії, користь 5 років хобі робототехніки було 10 (не підрахунок зроблено з Лего).
Розробка дизайну
З моменту того, як завдання було зробити роботу якомога швидше, нам довелося вдатися до готового рішення: Freeduino Nano, модульний драйвер двигуна і готовий сенсорний бар. Уміння розпочати роботу тільки в суботу в 12 годину.
14:00: Булет у мікроніках за відсутніми деталями!
15:00: Пхукет, приїхав додому з усім, що йому потрібно.
15:30: Ви можете замовити дизайн. Я дуже хотів зробити гарний робот, але наявність модульних деталей і обмежена кількість часу, що заперечувала все це, тому я не думаю багато про дизайн і макет.
18:30: Ось остаточна версія проводки (від 2 більше).

Будівництво
Спочатку план був простий: LUT -> щитовидної дошки -> свердління -> пайки -> кріплення двигунів та датчиків. Але коли все йде без пригод? Залишається тільки матовий папір, який не є Comilfo для LUT, Деталі розкидані в пакетах і коробках і т.д.
18.35: О, людина, я не перекладаю.
18.40: Ну, тонер не зійде, ми повинні знову зрізати текст
18.50: рагу, тепер передається.
19:00: Полювання, тепер я бурю.

19.10: Запобігання.
19.15: Скорочення, раціони та раціони знову.
19:30: Ах! Нереально вирізати паяльника так, щоб я знову зробив доріжок з такою ж сторінкою, як елементи.
20.20: Ох, це, я просто з'єдную дно.
20.40: О, її, робота стабілізатора, навіть не прогріваючи. Ми можемо взяти піцу.
21.10: Час тримати бота.
21:30: Де водій двигуна?
21:50: Знайдено його. Тепер потрібна акуратна сантехніка для підключення дюна до датчиків.

22.20: Гаразд, двигуни тепер. 22:30: Чому монтували тріщину?

22.40: Hmm, що ви робите сенсорні стійки з?
23.10: Гаразд, це проблема завтрашнього дня.
23.25: Короткий. Мені потрібно трохи поту.
23:30: Продаю це. Працює, не тепло.
23.50: Приїжджайте, Arduino приходять!
00:30: Немає драйверів для неї, так що ви можете зробити? Вже завтра. Тепер ми повинні піти на змагання і спати.

9:30: Я прийшов до змагання.
10.00: Зареєстровані, вибрані поле (товщина лінії -1.5 см)
570265 р.
12:00: Все, готове з дизайном, змінено нано, встановіть рейки, приклеїли червоною стрічкою.
12:30: Якщо ви подивитеся на інші види, ви можете почати втратити.
13:00: На П-регуляторі при швидкості 28%, бот повністю пройшов тестовий трек! Так виявився роботом в один день.
Висновок
Забіг стартував в 15:30, тому був час для поліпшення. Я написав PD, а потім Костянтин (мій-партнер) прийняв ініціативу і з великим ентузіазмом почали відхиляти і покращувати програму. "гімн" цього робота ми обрали пісню Muse - Madness, коли він озвучив відбілювання. Під час першої спроби робот пронизив доріжку 16 секунд, протягом другого і останнього в 14.25, той же результат, як переможець. Але він має краще, ніж наш, тому ми прийшли в другий.

І насправді фото роботи:


 Р
РПеревірити відео:
Джерело: habrahabr.ru/post/224171/