1521
¿Cómo hacer un robot durante 24 horas
Cuando las categorías en que el acto planificado y que no lo hará, y los exámenes no están muy lejos. I>
Introducción
Resultó que esta temporada estaba seriamente comprometido en sólo micro-sumo: comenzó a hacer el robot en julio de 2013, se graduó de finales de marzo de 2014. Las competiciones son robosumo habitual, pero la masa del robot no debe superar los 100 gramos, y el robot en la posición inicial debe ser colocado en un cubo de 5 cm * 5 cm * 5 cm. Expuso sus únicas uno competiciones 06 de abril, donde fue el único robot.
Negro Python compite con cinta adhesiva de doble cara. I>
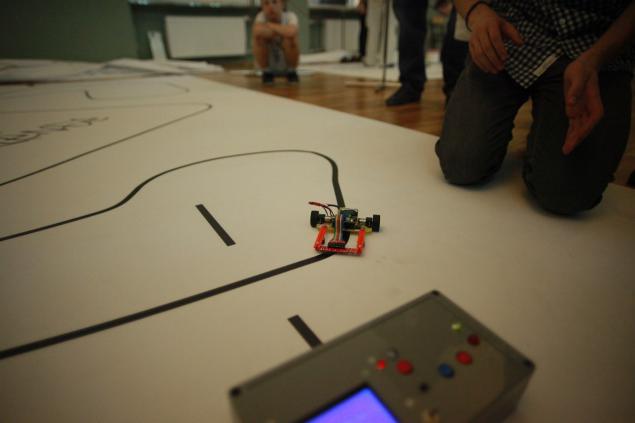
Al igual que en San Petersburgo por el momento sólo 2 robot de esta clase, en la competencia de mayo no incluir este tipo de competencia. Y puesto que el acto sería, me decidí a hacer una layntreysera rápida, movimiento del robot a lo largo de la línea, bien durante 5 años fue su afición robótica piezas 10 (excluidos los hechos de Lego).
Diseño
Dado que la tarea era hacer que el robot en términos más cortos, se tuvo que recurrir a una solución lista: Freeduino Nano, controlador de motor modular y sensores correa terminados. Capacidad para iniciar el robot sólo apareció el sábado en 12 horas.
14.00: bala en Micronika de piezas que faltan!
15.00: ¡Uf, llegó a casa con todos los detalles por favor.
15.30: Ate, y se pueden diseñar. Tenía muchas ganas de hacer un hermoso robot, pero la presencia de componentes modulares y una cantidad limitada de tiempo se ha reducido todo a la nada, así que creo mucho en el diseño y el diseño, no lo hice.
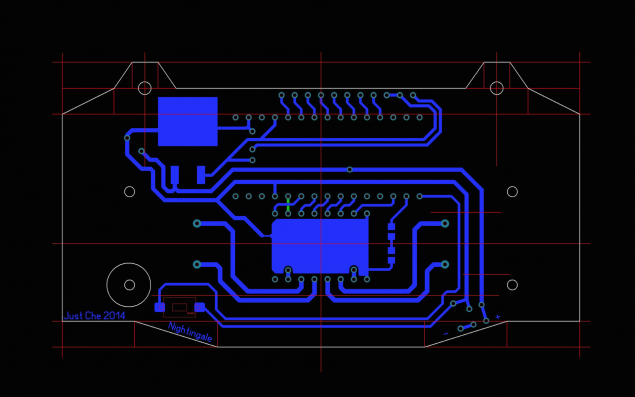
18.30: Esa es la versión final del cableado (había 2 más)
.
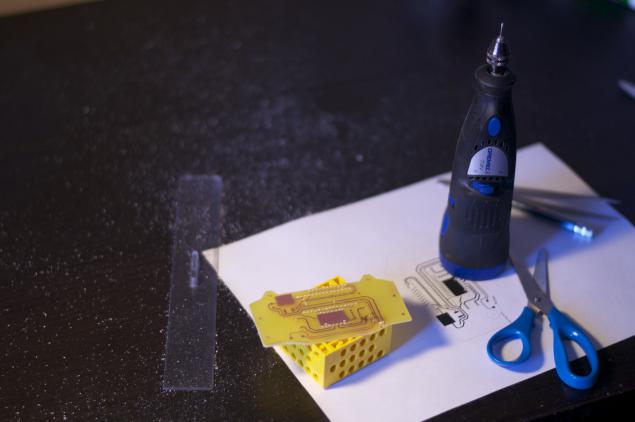
Haciendo diseño
Inicialmente, el plan era sencillo: LUT - & gt; aserrar tablas - & gt; Perforación - & gt; Soldadura - & gt; de montaje de motores y sensores. Pero cuando las cosas van sin aventuras? Sólo había un papel mate que Lut no se comme il faut, partes dispersas en los paquetes y cajas, etc.
18.35: Bueno, maldita sea, no extinto
. 18.40: Bueno bliin, tóner no viene, tendrá más tiempo para cortar PCB
. 18.50: ¡Uf, ahora traducido.
19.00: grabado, ahora simulacros Pelar
.
19.10: bebieron.
19.15: soldadura, soldadura fuerte y soldadura de nuevo.
19.30: ¡Ahh! Acoplamientos de desconexión rápida soldar irreal, que me hizo una vez más pistas saquean desde el mismo lado que los elementos.
20.20: Oh, bueno, todo está justo debajo de publicaciones perekinu.
20.40: Oh ella, el estabilizador está funcionando, ni siquiera caliente. Usted puede tomar un descanso por una pizza.
21.10: Es el momento de seguir haciendo el robot.
21.30: ¿Y dónde controlador de motor?
21.50: Encontrado. Ahora necesita un lazo aseado para la conexión a los sensores Dunya.
22.20: Bien, ahora los motores. 22.30: ¿Por que fija agrietado?
22.40: Hmm, ¿qué hacer desde el sensor de rack
? 23.10: Está bien, este es un problema de mañana
. 23.25: Chapo. Es necesario volver a cablear un poco.
23.30: recablear. Obras, no se calienta.
23.50: Vamos, Arduino, ya zaprogaysya!
00.30: No poner draysery para ella, bueno, ¿qué podemos hacer. Mañana, en el otro cambió. Y ahora tenemos que reunirnos para competir y tener un sueño.

9:30: Él vino a la competencia
. 10.00: Registrarse, tomó una caja de lujo (grosor de las líneas 1, 5 cm)

12.00: Cualquier cosa con el diseño terminado, UCSI cambio, puso el rack, raspador atascado.
12.30: miró a los otros, y usted puede comenzar Progat.
13.00: En el controlador P en un 28% la velocidad de la embarcación se pasa completamente la pista de pruebas! Aquí y conseguir que el robot en un día. B>
Conclusión
-En Comienza a las 15:30, por lo que era hora de mejorar los resultados. Escribí un PD, entonces Kostya (mi pareja) se hizo cargo de la iniciativa y entusiasmo comenzó a depurar y mejorar el programa. "Himno" del robot, que eligió la canción Muse - Locura, cuando sonaba ocurrió depuración. Durante el primer intento de realizar el seguimiento del robot viajado durante 16 segundos durante el segundo y último de 14.25, el mismo resultado que el ganador. Pero él tenía un mejor primer intento que la nuestra, por lo que tomó lugar II.

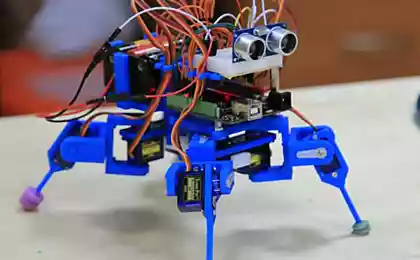
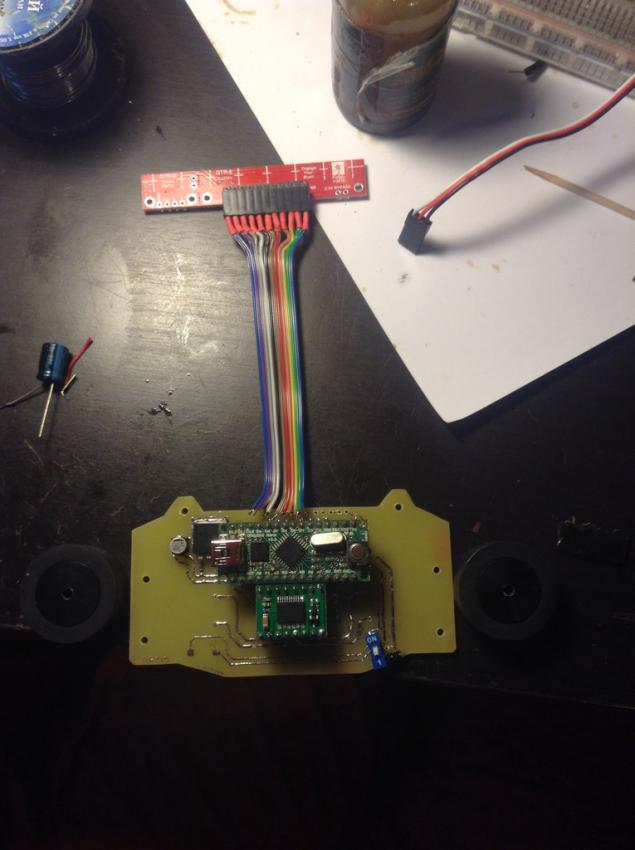
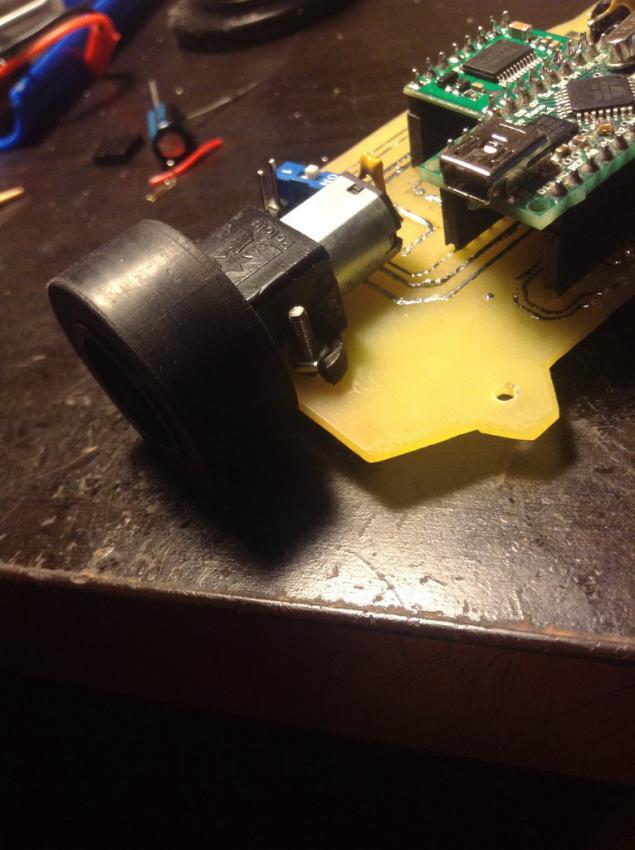
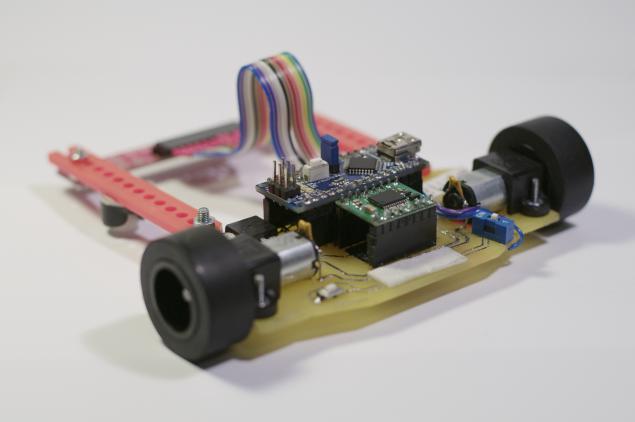
Y, de hecho, las fotografías del robot:
Video-In: i>
Fuente: habrahabr.ru/post/224171/
Introducción
Resultó que esta temporada estaba seriamente comprometido en sólo micro-sumo: comenzó a hacer el robot en julio de 2013, se graduó de finales de marzo de 2014. Las competiciones son robosumo habitual, pero la masa del robot no debe superar los 100 gramos, y el robot en la posición inicial debe ser colocado en un cubo de 5 cm * 5 cm * 5 cm. Expuso sus únicas uno competiciones 06 de abril, donde fue el único robot.
Negro Python compite con cinta adhesiva de doble cara. I>
Al igual que en San Petersburgo por el momento sólo 2 robot de esta clase, en la competencia de mayo no incluir este tipo de competencia. Y puesto que el acto sería, me decidí a hacer una layntreysera rápida, movimiento del robot a lo largo de la línea, bien durante 5 años fue su afición robótica piezas 10 (excluidos los hechos de Lego).
Diseño
Dado que la tarea era hacer que el robot en términos más cortos, se tuvo que recurrir a una solución lista: Freeduino Nano, controlador de motor modular y sensores correa terminados. Capacidad para iniciar el robot sólo apareció el sábado en 12 horas.
14.00: bala en Micronika de piezas que faltan!
15.00: ¡Uf, llegó a casa con todos los detalles por favor.
15.30: Ate, y se pueden diseñar. Tenía muchas ganas de hacer un hermoso robot, pero la presencia de componentes modulares y una cantidad limitada de tiempo se ha reducido todo a la nada, así que creo mucho en el diseño y el diseño, no lo hice.
18.30: Esa es la versión final del cableado (había 2 más)
.

Haciendo diseño
Inicialmente, el plan era sencillo: LUT - & gt; aserrar tablas - & gt; Perforación - & gt; Soldadura - & gt; de montaje de motores y sensores. Pero cuando las cosas van sin aventuras? Sólo había un papel mate que Lut no se comme il faut, partes dispersas en los paquetes y cajas, etc.
18.35: Bueno, maldita sea, no extinto
. 18.40: Bueno bliin, tóner no viene, tendrá más tiempo para cortar PCB
. 18.50: ¡Uf, ahora traducido.
19.00: grabado, ahora simulacros Pelar
.

19.10: bebieron.
19.15: soldadura, soldadura fuerte y soldadura de nuevo.
19.30: ¡Ahh! Acoplamientos de desconexión rápida soldar irreal, que me hizo una vez más pistas saquean desde el mismo lado que los elementos.
20.20: Oh, bueno, todo está justo debajo de publicaciones perekinu.
20.40: Oh ella, el estabilizador está funcionando, ni siquiera caliente. Usted puede tomar un descanso por una pizza.
21.10: Es el momento de seguir haciendo el robot.
21.30: ¿Y dónde controlador de motor?
21.50: Encontrado. Ahora necesita un lazo aseado para la conexión a los sensores Dunya.

22.20: Bien, ahora los motores. 22.30: ¿Por que fija agrietado?

22.40: Hmm, ¿qué hacer desde el sensor de rack
? 23.10: Está bien, este es un problema de mañana
. 23.25: Chapo. Es necesario volver a cablear un poco.
23.30: recablear. Obras, no se calienta.
23.50: Vamos, Arduino, ya zaprogaysya!
00.30: No poner draysery para ella, bueno, ¿qué podemos hacer. Mañana, en el otro cambió. Y ahora tenemos que reunirnos para competir y tener un sueño.

9:30: Él vino a la competencia
. 10.00: Registrarse, tomó una caja de lujo (grosor de las líneas 1, 5 cm)

12.00: Cualquier cosa con el diseño terminado, UCSI cambio, puso el rack, raspador atascado.
12.30: miró a los otros, y usted puede comenzar Progat.
13.00: En el controlador P en un 28% la velocidad de la embarcación se pasa completamente la pista de pruebas! Aquí y conseguir que el robot en un día. B>
Conclusión
-En Comienza a las 15:30, por lo que era hora de mejorar los resultados. Escribí un PD, entonces Kostya (mi pareja) se hizo cargo de la iniciativa y entusiasmo comenzó a depurar y mejorar el programa. "Himno" del robot, que eligió la canción Muse - Locura, cuando sonaba ocurrió depuración. Durante el primer intento de realizar el seguimiento del robot viajado durante 16 segundos durante el segundo y último de 14.25, el mismo resultado que el ganador. Pero él tenía un mejor primer intento que la nuestra, por lo que tomó lugar II.

Y, de hecho, las fotografías del robot:



Video-In: i>
Fuente: habrahabr.ru/post/224171/