Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
1515
0.4
2014-05-28
Как сделать робота за 24 часа
Когда категории, на которой планировал выступать, не будет, а экзамены не за горами.
Предисловие
Так вышло, что в этом сезоне я серьёзно занимался только микро-сумо: начал делать робота в июле 2013 года, закончил к концу марта 2014. Соревнования представляют собой обычное робосумо, но масса робота не должна превышать 100 грамм, а сам робот в стартовом положении должен помещаться в кубик 5 см * 5 см * 5 см. Выставлял его только на одних соревнованиях 6 апреля, там он был единственным роботом.
Black Python соревнуется с двусторонним скотчем.
Поскольку в Санкт-Петербурге на данный момент только 2 робота данного класса, то в майские соревнования не включили этот вид состязаний. А так как выступить хотелось, то я решил сделать по-быстрому лайнтрейсера, робота для движения по линии, благо за 5 лет увлечением робототехники их было штук 10 (не считая сделанных из лего).
Проектирование
Так как стояла задача сделать робота в крачайшие сроки, то пришлось прибегнуть к готовым решением: Freeduino Nano, модульный драйвер двигателей и готовая планка датчиков. Возможность начать робота появилась только в субботу в 12 часов.
14.00: Пулей в микронику за недостающими деталями!
15.00: Фух, пришёл домой со всем неоходимым.
15.30: Поел, можно и проектировать. Я очень хотел сделать красивого робота, но наличие модульных деталей и ограниченное количество времени свело всё это на нет, так что долго думать над дизайном и компоновкой я не стал.
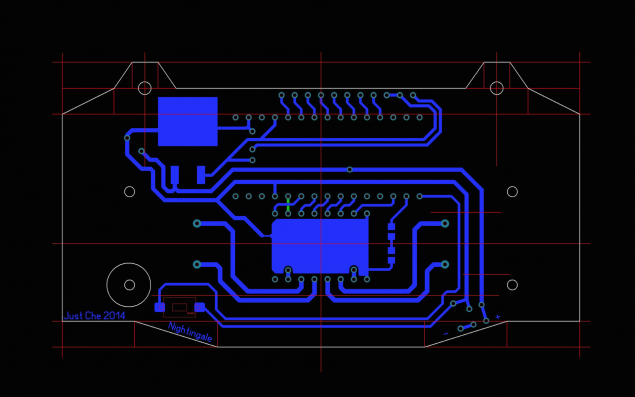
18.30: Вот и окончательный вариант разводки (было ещё 2).
Изготовление конструкции
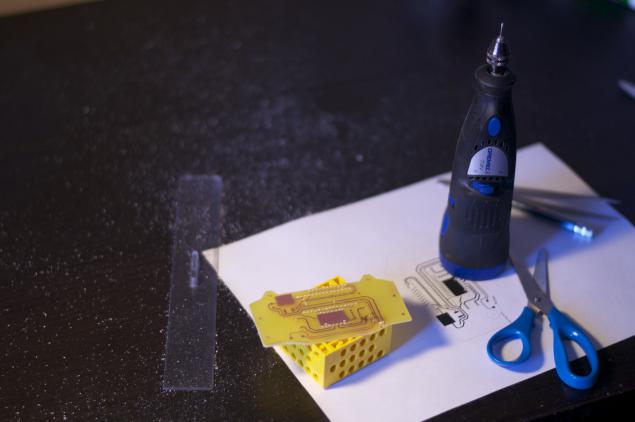
Сначала план был простой: ЛУТ -> выпиливание платы -> сверление -> пайка -> крепление моторов и датчиков. Но когда всё обходилось без приключений? Осталась только матовая бумага, что для ЛУТа не комильфо, детали разбросаны по пакетам и ящикам и т.д.
18.35: Ну блин, не перевелось.
18.40: Ну блиин, тонер не сходит, придётся ещё раз пилить текстолит.
18.50: Фух, теперь перевелось.
19.00: Вытравилась, теперь пилю сверлю.
19.10: Выпилил.
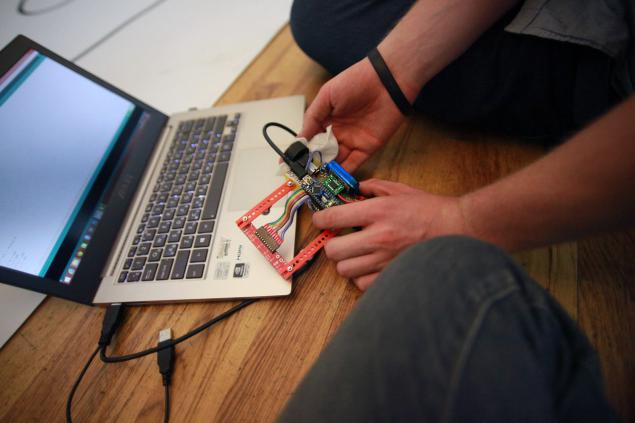
19.15: Пайка, пайка и ещё раз пайка.
19.30: Аааа! Разьёмы припаять нереально, что бы я ещё раз делал дорожки ЛУТом с той же стороны, что и элементы.
20.20: Да ну это всё, просто снизу проводками перекину.
20.40: Оу ее, стабилизатор работает, даже не греется. Можно сделать перерыв на пиццу.
21.10: Пора бы продолжить делать бота.
21.30: И где драйвер двигателей?
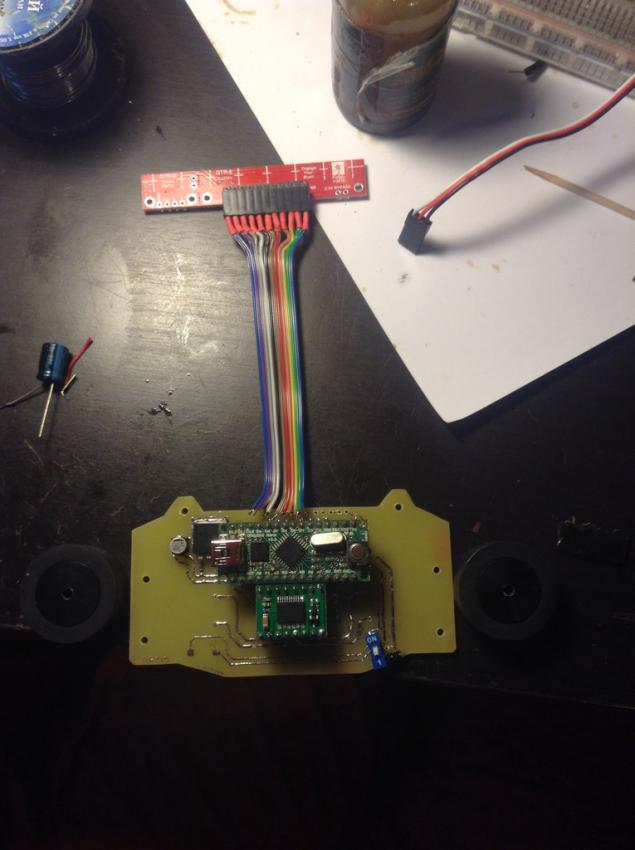
21.50: Нашёл. Теперь нужен аккуратный шлейф для соединения дуни с датчиками.
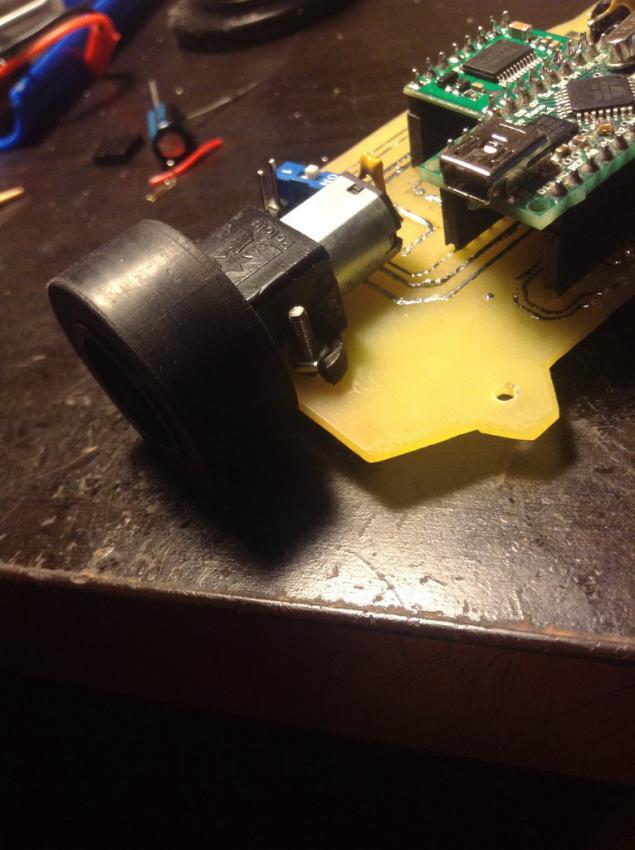
22.20: Хорошо, теперь моторы. 22.30: Ну почему крепление треснуло?
22.40: Хм, а из чего делать рейки для датчика?
23.10: Ладно, это проблема завтрашнего дня.
23.25: Коротыш. Надо перепаять чуток.
23.30: Перепаял. Работает, не греется.
23.50: Ну же, ардуино, запрогайся уже!
00.30: Не ставятся драйсеры для неё, ну что поделать. Завтра на другую поменяю. А сейчас надо собраться на соревнования и поспать.

9.30: Пришёл на соревнования.
10.00: Зарегистрировался, облюбовал поле (толщина линии -1,5 см)

12.00: Всё, с конструкцией закончил, нану сменил, рейки поставил, волокуши приклеил.
12.30: Посмотрел на другие виды, можно и начать прогать.
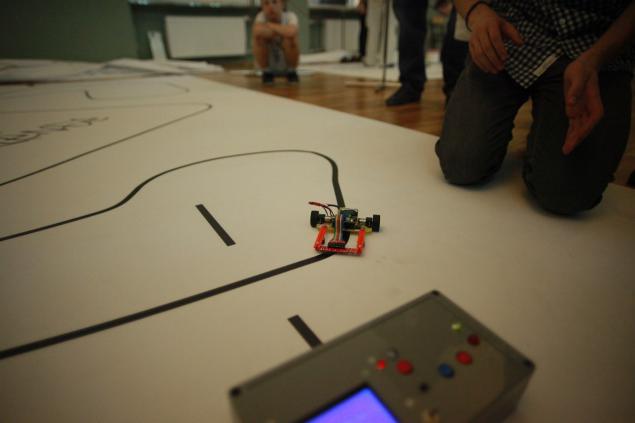
13.00: На П-регуляторе на 28% скорости бот полностью проехал тестовую трассу! Вот и получился робот за один день.
Заключение
Заезды начинались в 15:30, так что было время улучшить результаты. Я написал ПД, потом Костя (мой напарник) перенял инициативу и с большим энтузиазмом начал отлаживать и улучшать программу. «Гимном» этого робота мы выбрали песню Muse — Madness, когда она звучала происходила отладка. Во время первой попытки робот проехал трассу за 16 секунд, во время второй и последней за 14.25, такой же результат, как у победителя. Но у него лучше первая попытка, чем наша, поэтому мы заняли II место.

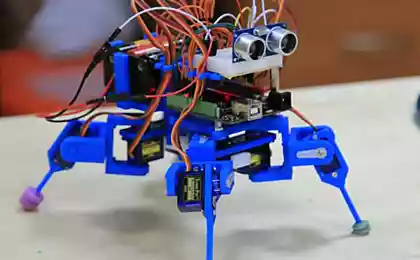
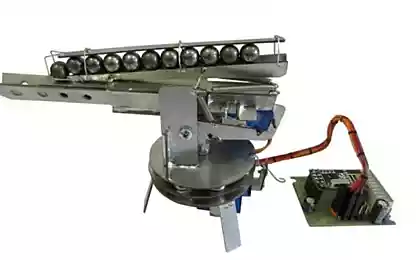
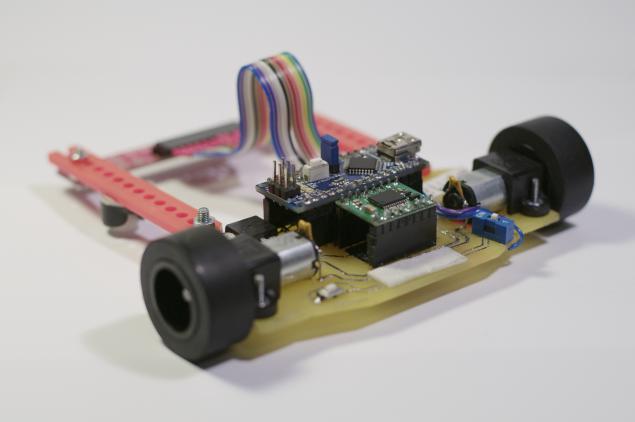
И, собственно, фотографии робота:
Видео заезда:
Источник: habrahabr.ru/post/224171/
Предисловие
Так вышло, что в этом сезоне я серьёзно занимался только микро-сумо: начал делать робота в июле 2013 года, закончил к концу марта 2014. Соревнования представляют собой обычное робосумо, но масса робота не должна превышать 100 грамм, а сам робот в стартовом положении должен помещаться в кубик 5 см * 5 см * 5 см. Выставлял его только на одних соревнованиях 6 апреля, там он был единственным роботом.
Black Python соревнуется с двусторонним скотчем.
Поскольку в Санкт-Петербурге на данный момент только 2 робота данного класса, то в майские соревнования не включили этот вид состязаний. А так как выступить хотелось, то я решил сделать по-быстрому лайнтрейсера, робота для движения по линии, благо за 5 лет увлечением робототехники их было штук 10 (не считая сделанных из лего).
Проектирование
Так как стояла задача сделать робота в крачайшие сроки, то пришлось прибегнуть к готовым решением: Freeduino Nano, модульный драйвер двигателей и готовая планка датчиков. Возможность начать робота появилась только в субботу в 12 часов.
14.00: Пулей в микронику за недостающими деталями!
15.00: Фух, пришёл домой со всем неоходимым.
15.30: Поел, можно и проектировать. Я очень хотел сделать красивого робота, но наличие модульных деталей и ограниченное количество времени свело всё это на нет, так что долго думать над дизайном и компоновкой я не стал.
18.30: Вот и окончательный вариант разводки (было ещё 2).

Изготовление конструкции
Сначала план был простой: ЛУТ -> выпиливание платы -> сверление -> пайка -> крепление моторов и датчиков. Но когда всё обходилось без приключений? Осталась только матовая бумага, что для ЛУТа не комильфо, детали разбросаны по пакетам и ящикам и т.д.
18.35: Ну блин, не перевелось.
18.40: Ну блиин, тонер не сходит, придётся ещё раз пилить текстолит.
18.50: Фух, теперь перевелось.
19.00: Вытравилась, теперь пилю сверлю.

19.10: Выпилил.
19.15: Пайка, пайка и ещё раз пайка.
19.30: Аааа! Разьёмы припаять нереально, что бы я ещё раз делал дорожки ЛУТом с той же стороны, что и элементы.
20.20: Да ну это всё, просто снизу проводками перекину.
20.40: Оу ее, стабилизатор работает, даже не греется. Можно сделать перерыв на пиццу.
21.10: Пора бы продолжить делать бота.
21.30: И где драйвер двигателей?
21.50: Нашёл. Теперь нужен аккуратный шлейф для соединения дуни с датчиками.

22.20: Хорошо, теперь моторы. 22.30: Ну почему крепление треснуло?

22.40: Хм, а из чего делать рейки для датчика?
23.10: Ладно, это проблема завтрашнего дня.
23.25: Коротыш. Надо перепаять чуток.
23.30: Перепаял. Работает, не греется.
23.50: Ну же, ардуино, запрогайся уже!
00.30: Не ставятся драйсеры для неё, ну что поделать. Завтра на другую поменяю. А сейчас надо собраться на соревнования и поспать.

9.30: Пришёл на соревнования.
10.00: Зарегистрировался, облюбовал поле (толщина линии -1,5 см)

12.00: Всё, с конструкцией закончил, нану сменил, рейки поставил, волокуши приклеил.
12.30: Посмотрел на другие виды, можно и начать прогать.
13.00: На П-регуляторе на 28% скорости бот полностью проехал тестовую трассу! Вот и получился робот за один день.
Заключение
Заезды начинались в 15:30, так что было время улучшить результаты. Я написал ПД, потом Костя (мой напарник) перенял инициативу и с большим энтузиазмом начал отлаживать и улучшать программу. «Гимном» этого робота мы выбрали песню Muse — Madness, когда она звучала происходила отладка. Во время первой попытки робот проехал трассу за 16 секунд, во время второй и последней за 14.25, такой же результат, как у победителя. Но у него лучше первая попытка, чем наша, поэтому мы заняли II место.

И, собственно, фотографии робота:



Видео заезда:
Источник: habrahabr.ru/post/224171/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.