1200
如何建立与他们的手(战斗炮塔)机器人
当然,谁是从事机器人技术,他希望让机器人手。但不是每个人,特别是初学者,足够的知识来构建自己的机器人。而这个问题马上出现了:如何让一个机器人,如果你真的想要的吗?
要创建一个机器人,除了观念需要不同的复杂数据表。另外,不要省掉机箱机器人以及各种机械零件的未来。当然,一切都将取决于你的项目的范围。但是,如果没有力学是不可能的,你会做。
也许有人喜欢用现成的设计师创建不同的机器人。例如,«乐高»。此构造创建不同复杂程度的机器人所需的一切,但该构造并不便宜。并同意,更愉快的去思考他的创作,如果它是从“A”到“Z”独立制作,从草图在纸上的充分实现在设想的规模。
对于这些有创意的人谁不害怕用自己的双手一起工作与他们的孩子,以及青少年无线电模型开发的“炮塔”。当然,它不是一个机器人,但根据我的项目,您可以创建各种精彩的机器人设备。特别是因为一切都是由低价材料。
建立一个旋转的齿轮 B>
炮塔旋转底盘是由双面PCB箔,像极了部件的国产。这种材料很轻,易于加工,具有足够的强度。随着铁皮剪可以切割任何合适的项目。
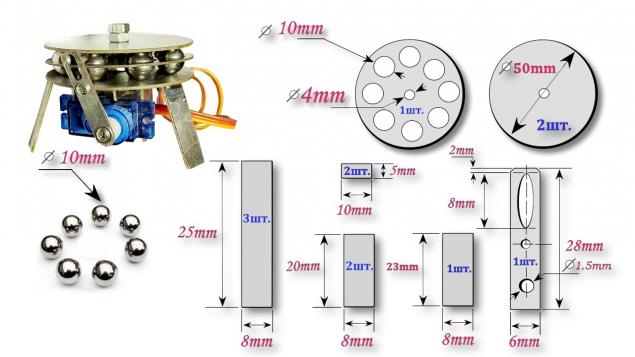
在此项目中的圆形旋转工具不是必需的,因为该行业需要一点点火。因此,对于这个任务,预算就伺服SG90。
机箱必须到位炮塔射击期间举行,并给它滚动,在测试模式返回从枪射击被证明是相当大的。
对于旋转底盘我用一个自制的球轴承。因此,出现了转向齿轮,得益于金属球的重量还算稳定,但出手炮塔仍轻微移动。我有哪怕是一点点减少的射门力量。
构建枪或大炮 B>
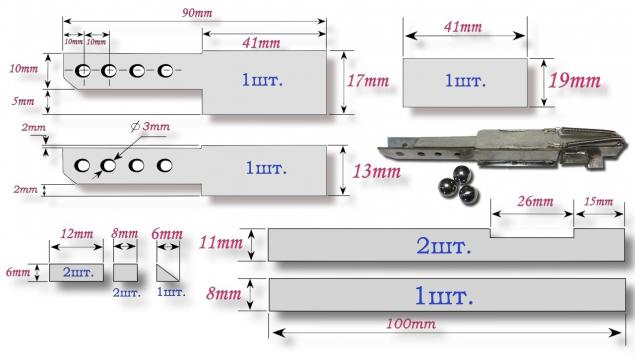
随着炮塔不得不修补。众多成熟的设计方案中,我选择了这个选项(参见图1)。在躯干此性能可以容易地装入金属球直径8毫米,作为电子枪的设计已经非常强。要球不滚动在枪管上,它的立场是明确表示在树干通孔发了言。
机箱和旋转机构设置枪和快门上膛的枪 B>
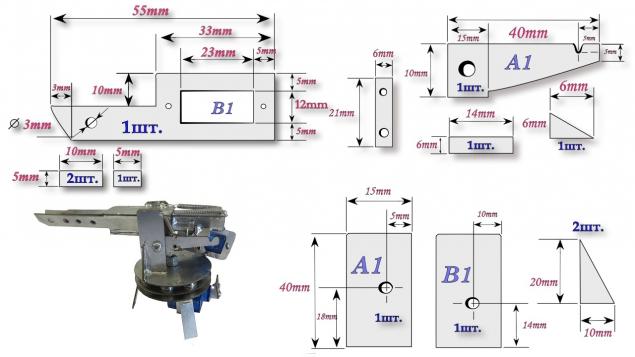
通过设置在机箱的旋转工具,我开始组装击发机构的进程。为了完成这一目标,帮助我伺服SG90。努力伺服够拉的春天。一旦冲击往往发现自己在一个位置,消防锁,其持有的竖起状态的桶。在这个位置上,竖起是位于所述桶的底部杠杆致动器,只是携带干扰镜头。
为了实现拍我用一个简单可靠的方法。一旦躯干闩固定(图1),致动器必须返回到原来的状态。在某些时候他的方式伺服按下触发器,并在同一时间丢弃保存锤的闩锁。这个镜头被做。

这家商店有12个金属球,从轴承拍摄,虽然可以轻松地拍摄大珠。为了便于滚珠的流入桶,我布置在商店以微小的角度。载入躯干球进行根据自己的体重,他们只是轧制哪里nuzhno.Nachalnoe鼓手位置切断金属球(图1)。只要鼓手离开,上部球下降。
但是有一个问题:一个金属球的秋天开始引人关注。为了解决这个问题,我做了侧孔在树干。其所持有的球的位置,防止它移动(图2)。
应用电子 B>

对于无线控制机器人炮塔我申请费,先前为项目&QUOT发达; 攻城投石车"
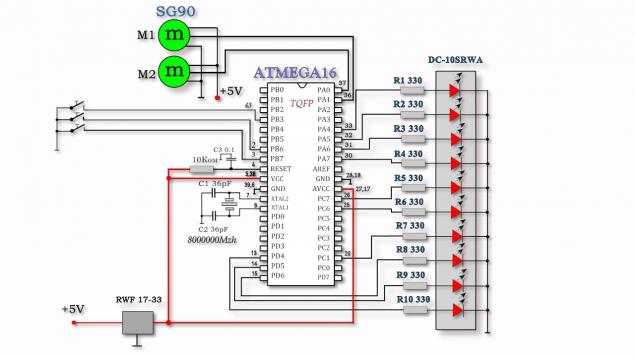
因为这是不可能的某人将重复 radiodzhoystik 的,我所提出的,因为它是相当复杂的,在执行一个更简单的变体,尽管在电路板上布线维持收音机。
正如你可以从概念看,操纵杆非常简单,由三个按钮时钟连接到单片机。通过转动转台向右或向左两个时钟按钮。其余的时钟按钮给球队一个镜头。这些谁在微控制器编程的一些知识可以编写自己的程序版本,微控制器的。
例如,装备该设备有一个接近传感器作为对象被以预定距离检测,火灾自动可尽快执行。由于这种自制我开发作为用于青年无线电,等级,分别一基本模型,和产品的复杂性也可以改变。
如何建立一个机器人 - 计划,固件大小
资料来源: geektimes.ru/post/267414/























