507
Robots-customs officers will identify the contraband

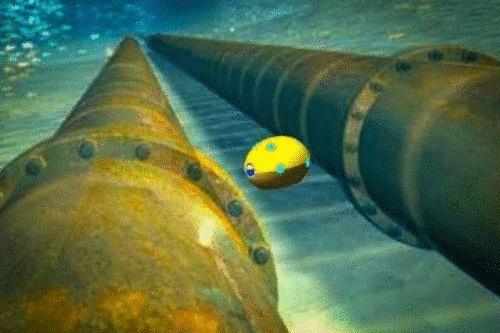
Maritime smugglers very often use fake ships and boats, special niches, and other devices for concealment of illegally transported goods. Although customs has the methods of detection of such "bookmarks" these methods leave the smugglers enough time, so time to get rid of compromising their occupation evidence. However, if inspection of hulls of vessels and boats will be engaged in specialized underwater robots? In this case, inspection can be performed so that the fact the crew will not even guess? That is what a team of researchers from the Massachusetts Institute of technology, which has already created a prototype robot officer and began its first tests.
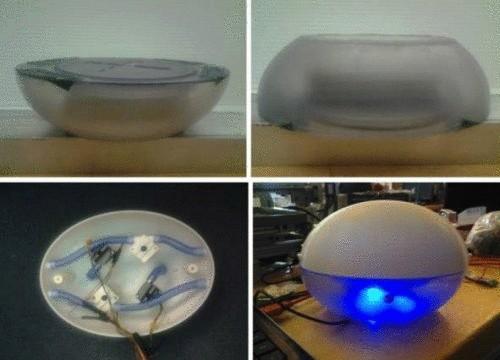
The prototype of the underwater robot was created by a graduate student, Sampriti Bhattacharya (Sampriti Bhattacharyya), working under the guidance of Professor Harry Asada (Prof. Harry Asada). The body of the robot and most of the elements of its design manufactured mainly by using three-dimensional printing technology. The housing has an oval shape with a flat base, and its size is comparable to the size of a soccer ball.
Half of the robot body is a watertight compartment which houses all the electronics, including the scheme of control, rechargeable lithium battery, communication system with an antenna and an inertial navigation system. The latter system consists of three accelerometers and three solid-state gyroscopes, which are used to track the current position of the robot in his movements.
The second half of the robot body is filled with water and represents the location of the propulsion system of the robot. The propulsion system consists of six miniature water pumps, which are connected by rubber tubes with the output holes of the nozzles. Streams of water emerging from the nozzles create a jet thrust, moving the robot in the opposite direction, and the total motion vector is composed of several vectors of thrust forces generated by water jets spraying from different nozzles. Thanks to this propulsion system, the robot can reach the speed of 1 meter per second and make different, even very complex maneuvers in the water.
Ultimately, each of the robots-customs officers will be equipped with an ultrasound scanner. Several pieces of such robots can surround underwater vessel, which is in the process of customs inspection and, advancing along the body to produce an ultrasound scan to find different anomalies, which can indicate hidden contraband.
Using existing communication systems, the robots can coordinate the actions of the group as a whole and transmit collected data to the responsible customs officers. When driving underwater robots will not leave any visible traces that can give their work the members of the crew suspected of smuggling.
The prototype robot officer may work on a single battery charge continuously for only 40 minutes. But the next version of the robot will be able to work a minimum of 100 times longer, and even with the constant use of the ultrasonic scanner that uses a fairly large amount of energy. However, unsolved remains the problem of ensuring the quality of the ultrasound scanning surface of the hull, which can be patches, rivets, a layer of algae and molluscs. But the researchers plan to solve this problem by using the hydrodynamic buffer, a kind of "cushion" of water between the body of the robot and the surface of the hull.
The researchers calculated that the cost of the final version of the robot-the customs officer will not exceed the level of 600 us dollars. This indicates that the use of these robots can be much more profitable than using other underwater robots and this, in turn, can cause a fairly wide distribution of robots of similar design, which can not only perform the job of customs inspection, and many other types of work.
Source: www.dailytechinfo.org
























Herbal infusions and teas for headaches
Is it possible to identify cancer in 10 years before the disease?