Remake of the famous proverb says that it is better to see once than read a hundred times. We talked a lot about the new features and benefits that gives a second screen YotaPhone. But the most intelligible description can not be compared with the ability to see what it is - to work with the second screen of the smartphone.
So we decided to create a robot that would help to demonstrate the idea. And not just any robot, and specially trained to manage YotaPhone. We have created it with great guys from Look At Media.
«Lab» h4>
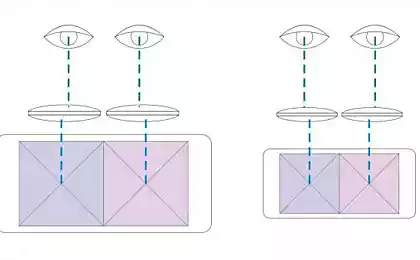
This project we called « Lab ». Its essence is to give everybody an opportunity to test some of the functions remotely YotaPhone using specially created for this robot. Most of this, of flesh and blood and plastic servo motors. And thanks to two cameras can observe what is happening on both screens YotaPhone.
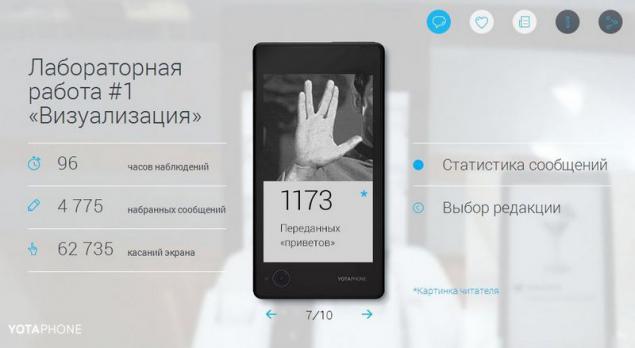
Briefly, the process of controlling the robot was as follows: through the website can send SMS text and number, and then observe how the robot gathers and sends it for you. If the text includes a certain word markers, the second picture is displayed, set up for this word.
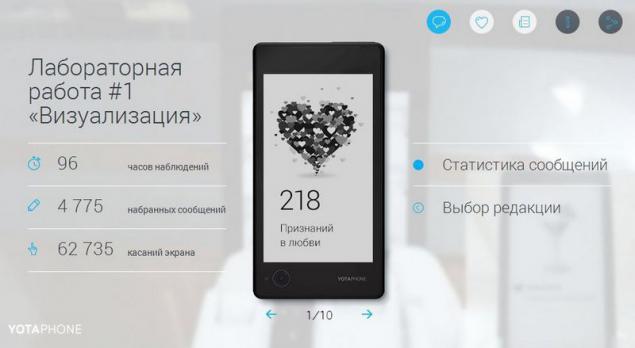
During the operation of the robot as the sender SMS sent to our users with the help of 4,775 posts, of which 218 were declarations of love. By the way, it was also 65 hacking attempts.
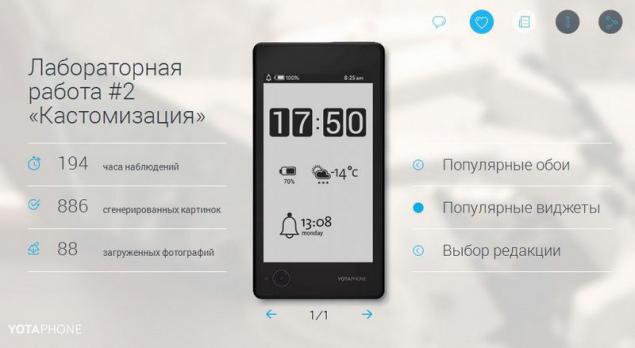
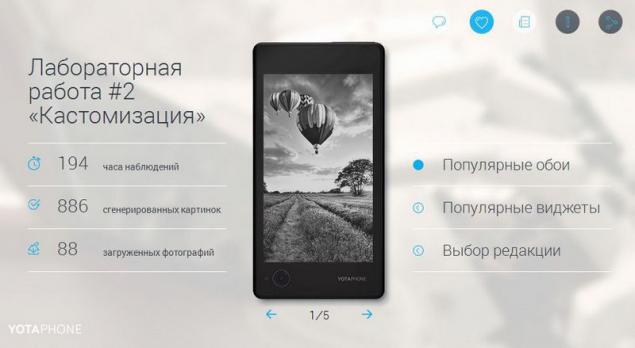
Then was held the second phase of testing we have made it possible to remotely download the wallpaper on your second screen belonging to the robot YotaPhone, as well as to select different widgets. Robot "collected" on the main screen a set of wallpapers and widgets, and then motioned brand put2back effectively sends it to the second screen. During this step, the user generated and uploaded 886 pictures 88 pictures.
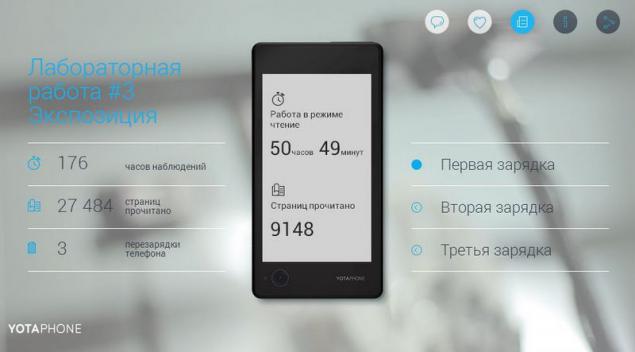
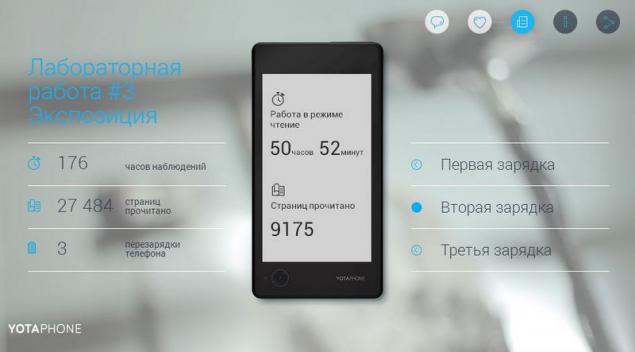
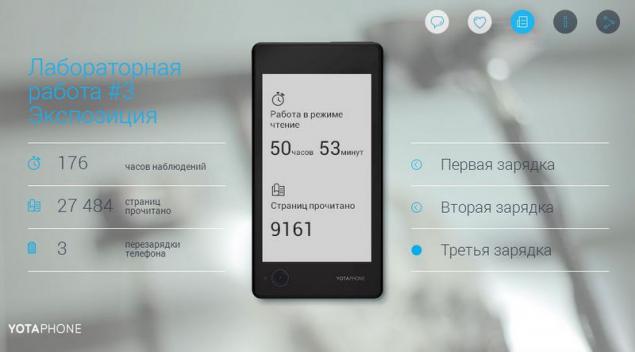
Recently completed the third phase of remote testing YotaPhone all comers with the help of a robot. This time we had a stress test: how long it will last YotaPhone from a single battery charge while reading a book on the second screen. In the role of a literary source made "War and Peace", and the rate of "reading" was about 3 pages per minute. Especially for the third phase, we have built around YotaPhone hoop that hosts the lights for the second screen. It is connected to an additional Arduino. Anyone could not only around the clock to watch the process of reading "War and Peace", but also to change the light intensity, simulating situations for different times of day.
During this phase, there have been three trials, that is charged smartphone three worked to fully discharge. Here are the results of the third stage:
History h4>
First, we decided to take the path of least resistance and examined available to the public ready projects like robotic arms, including even such a project open source. The main shortcoming of the project was the mechanization of the fingers on the basis of tensioned cables. Unfortunately, it would not achieve the desired positioning accuracy. We also liked the this project , but he did not meet a key condition - the presence of hands - so from him, too, had to be abandoned. As a result, it was decided to create a robot of their own design.
prototype
First, we decided to make a rough draft of an epoxy resin. Moldings knife gave the desired shape, and then painted white. First, we wanted to test the functionality of the design, estimate the location and methods of attachment servomotors, to assess the range of motion of fingers.
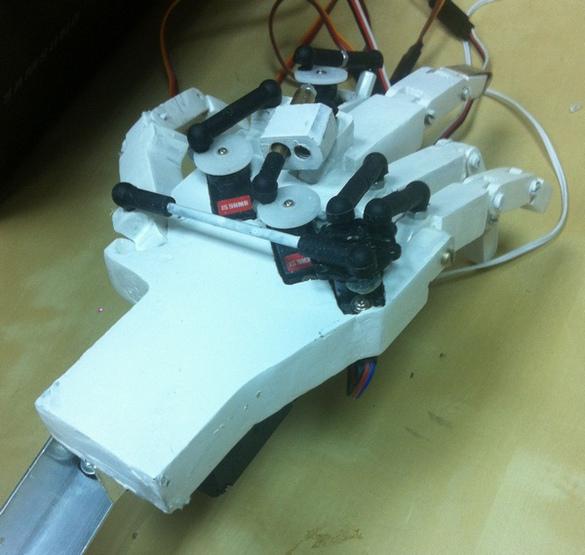

To control all servos decided to use Arduino UNO. After the test, the first version of the prototype came to the following conclusions:
• To improve the positioning accuracy is necessary to remove the servos with phalanges
• Each finger has to be controlled by only one servo
• To swipe gesture is necessary to ensure the movement of the entire arm up / down
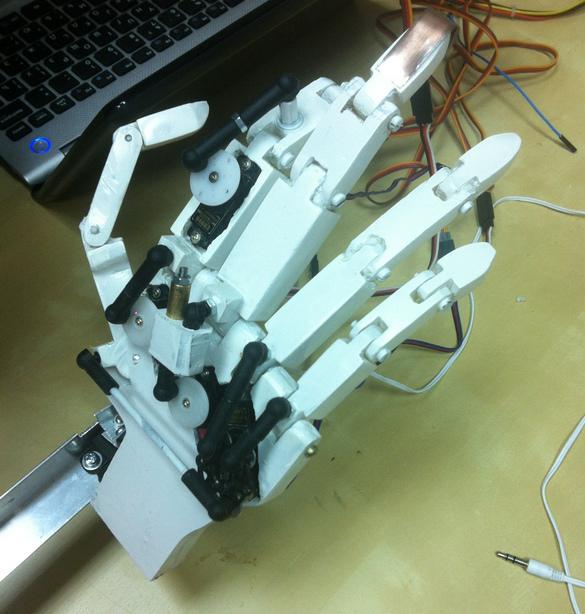
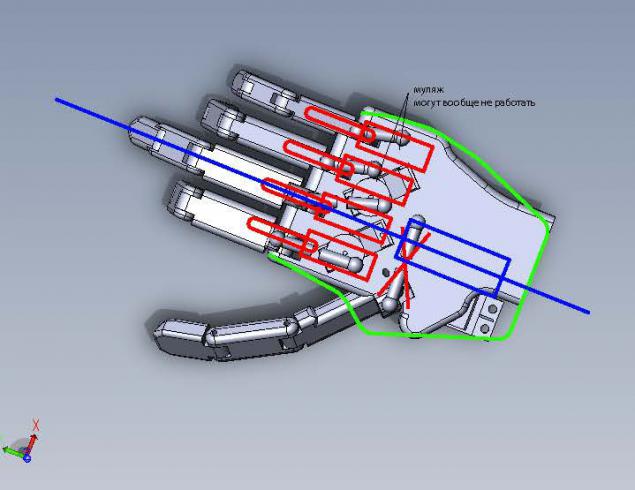
working sample
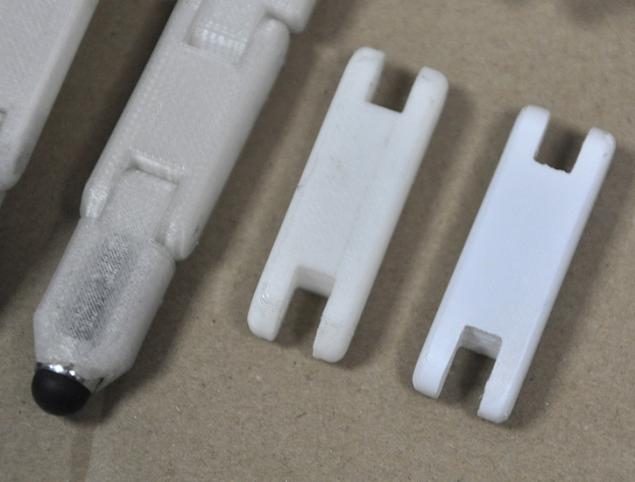
In SolidWorks CAD-package we created 3D-model of 15 items that make up the hand. After printing on 3D-printer and assembly testing conducted on the interaction with the touch screen.
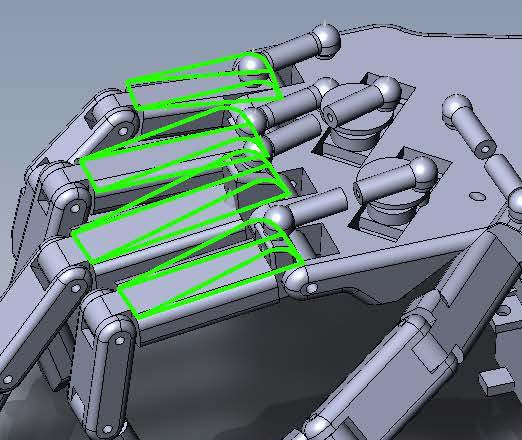
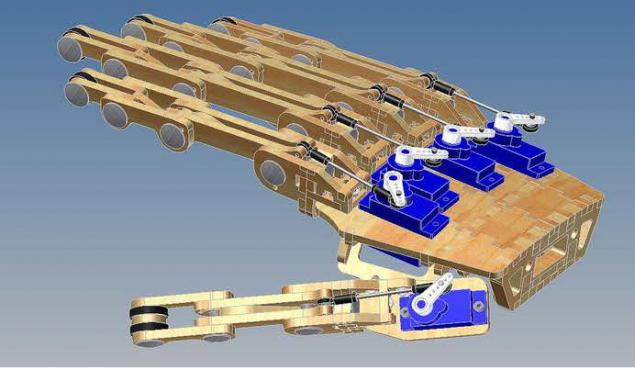
It turned out that capacitive screen does not respond to the plastic from which the arm is made. The problem was solved by setting the fingers cut off from the tip styluses large diameter.
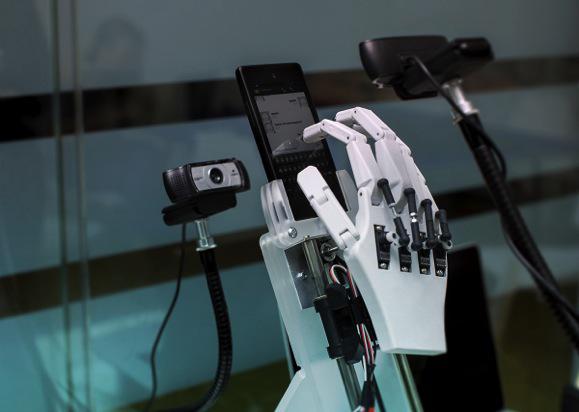
Installed on a hand turning the engine and servos that control the fingers. Their accuracy was not enough for reliable positioning fingers caught on virtual buttons on the screen of your smartphone. As a result, had to use expensive servos, produced for model airplanes: FUTABA S1353 finger and BLS-352 to rotate the arm. In addition to positioning accuracy, we decided the problem of reliability because the hand had to work continuously for three weeks.
After solving this problem started to solve a new one. The hand itself mounted on the shaft of the stepper motor, which is mounted on the movable up / down platform. The engine is responsible for turning the arm about an axis perpendicular to the plane of the smartphone. And during turns vibrates badly, because the overall rigidity of the structure can not compensate there is a significant moment of inertia. This again leads to a decrease in the positioning accuracy of the fingers. To reduce vibration, we tried to apply different pads in articulation, but it was ineffective. Had to artificially reduce the speed of the rotary engine and enter a small pause after each turn, to have time to go out residual vibration.
An unexpected problem was associated with a rotary engine. He very much warmed. It was decided to assemble the intermediate controller, which is completely shut off the engine during idle times.
To improve the appearance of the second working robot printed sample from the lighter plastic. Before assembly further details painted in white to give the product an even more elegant look.

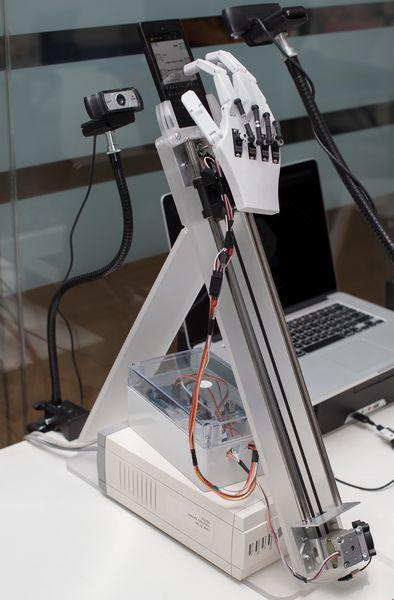
rack
The smartphone, which should run the robot, it was decided to place obliquely, as it usually keeps a person, not vertically or horizontally. Based on this rack has been designed in the form of a rectangular triangle the hypotenuse of which comprises two rails on which the platform is moved with the hand.
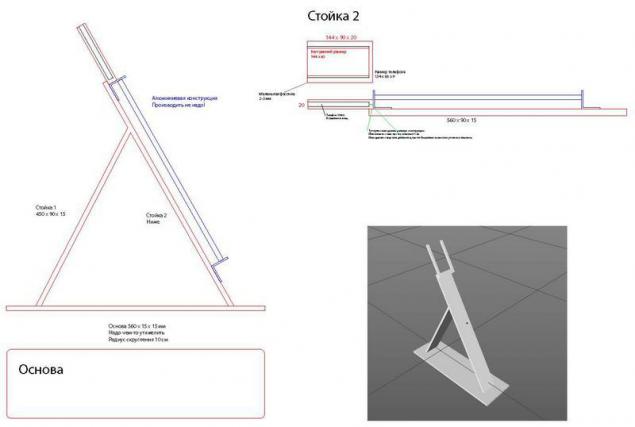
Rack was made of white plastic. The platform is connected to the hand belt drive stepper motor, by which the platform is moved along the guide rails.

The software part
After removing all the electro-mechanical barriers, we moved on to debug the software part of the project. As the client side, we wrote a small web application in JavaScript. Information from the client gets to our server that is running Ruby 2.0.0 Rails 4 MySQL. The server collects user requests and forms a queue of tasks for the robot. This information the server sends to the local management application written us on NodeJS. All data is transmitted in the format JSON. Further tasks are mapped to specific commands to Arduino, which is directly connected robot. Interaction with Arduino carried out by the library voodootikigod / node-serialport i>.
In addition, the management application receives feedback from a specially written client running directly on the smartphone. This client monitors the coordinates of clicks, and if a discrepancy is detected, the control application performs dokalibrovku.
Third function entrusted to the management application is recording video clips, which show each task. For video recording, use the camera Logitech C920 , is attached to the gibkih holders . During the passage of the first phase of the project management application received from the client module on your smartphone information on sending SMS. Video cameras recorded using WireCast, it was cut further from the corresponding video clip and link it sends the user.
To save time, we decided to create their own API for video broadcast media, and instead used the solution from the company CDNvideo. However, due to the fact that their API has not been yet polished, while we were having problems keeping movies. In the end, the developer has provided us with a new, fully working version of the API.
In total, we have made two robots that are directly involved in public testing YotaPhone. The last sample was slightly modernized: it was necessary to change the place of attachment of the rotary engine to the hand, so that the robot could make a gesture scroll the screen (swipe).
Conclusion
This project was for us a very exciting experience. Opportunity to creatively solve the problem of non-standard, creating a new and quite universal devices, observation of how the robot is "live" their lives thanks to the interest of users - it's all very close in spirit to our work on YotaPhone.
We would like to give everybody an opportunity to personally try what it is - a smartphone with two screens. Feel the phone in your hand, to evaluate the response of the e-ink screen. Unfortunately, it's impossible. But we believe that, even if remote, but independent interaction with your smartphone to better understand the benefits of the second screen. We believe that the possibility of such interactive testing YotaPhone much more honest compared to licked commercials. What do you think? We are very interested to know your opinion about this project.
Source: habrahabr.ru/company/yotadevices/blog/223543/