2928
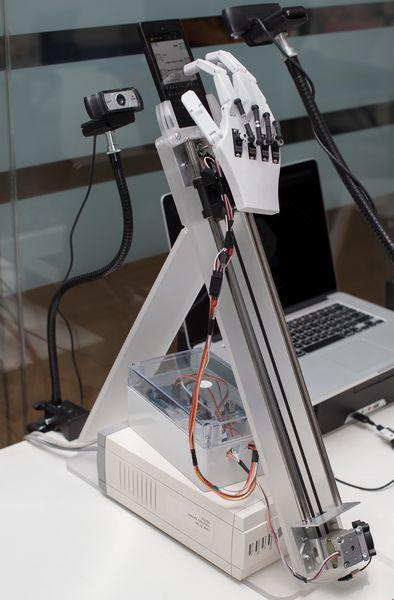
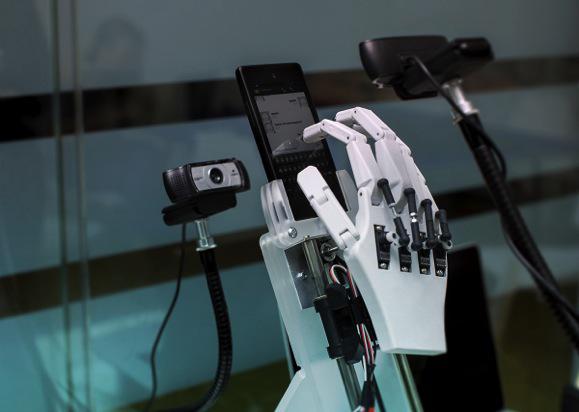
实验“实验室”或者,正如我们已经创建了一个机器人智能手机青睐
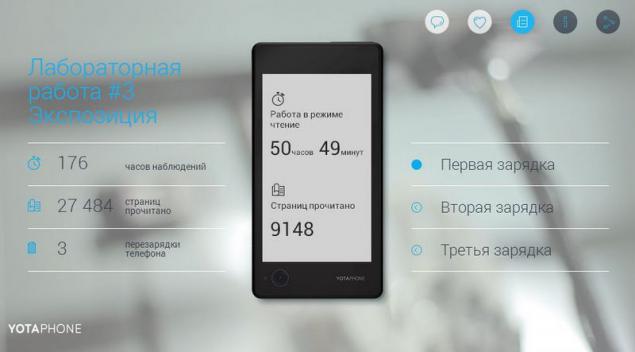
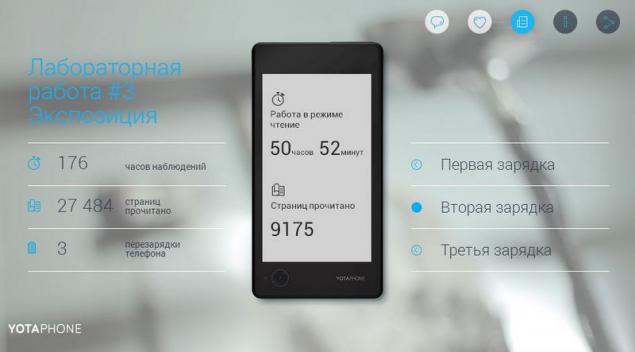
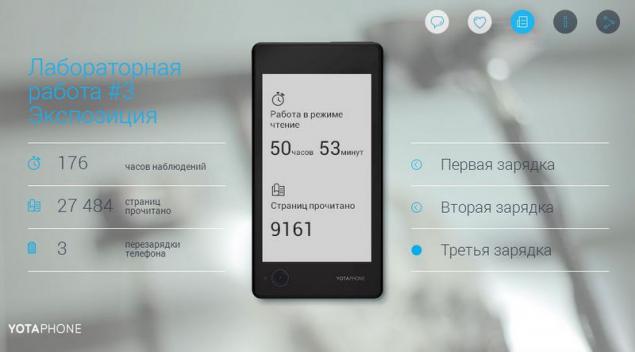
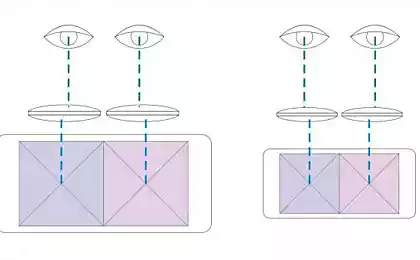
著名的谚语重拍说,这是更好地看到一次比读一百遍。我们谈了很多关于新的功能和优势,让第二个屏幕YotaPhone。但最用户友好的介绍不能与能力,看看它是比较 - 与智能手机的第二个屏幕工作
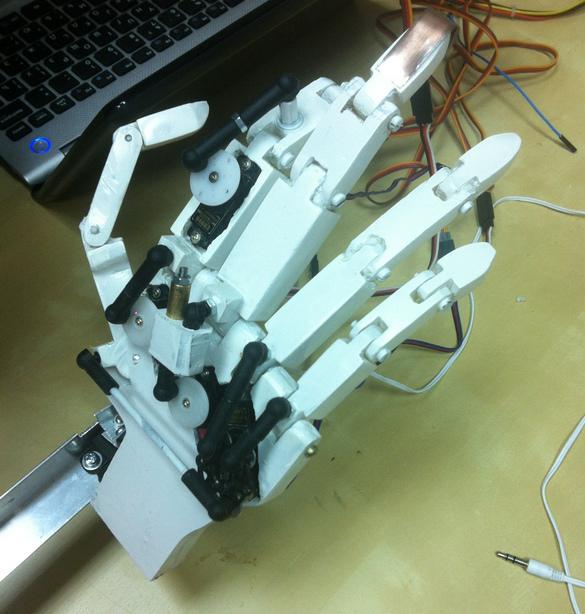
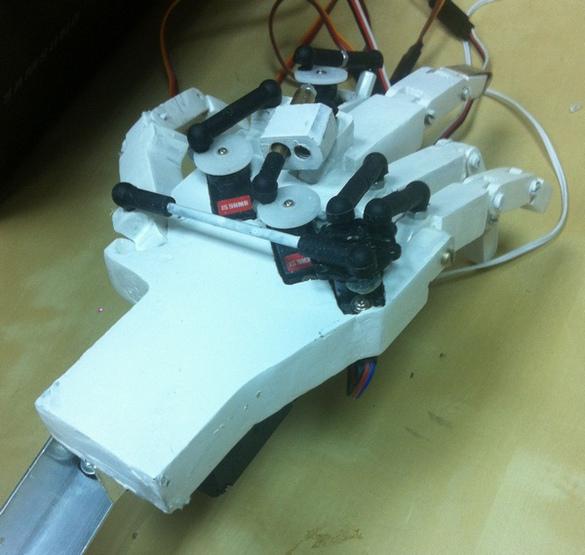
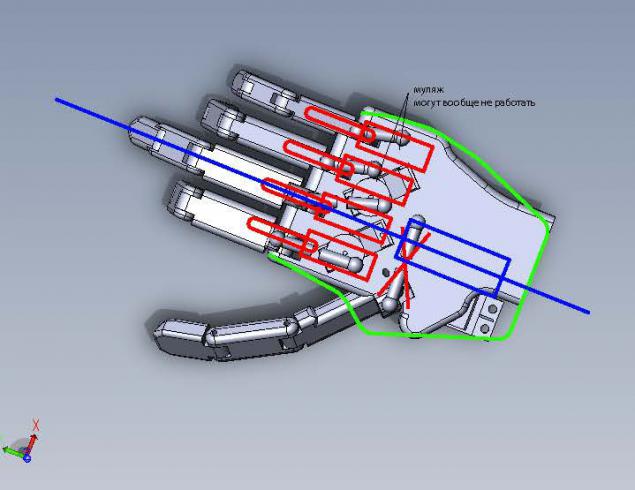
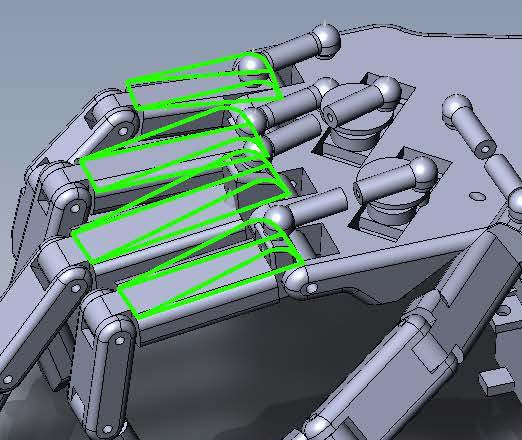
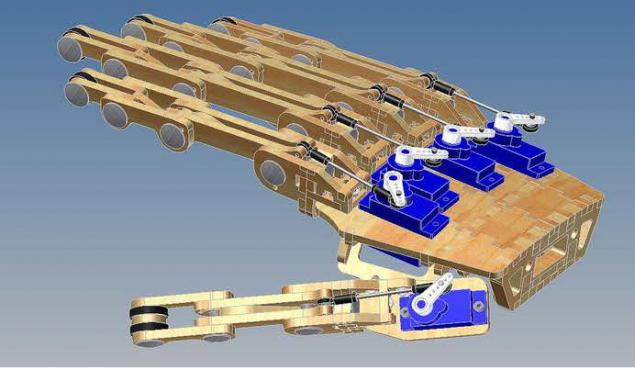
我们决定创建一个机器人,这将有助于证明这个想法。而且不只是一个机器人和训练有素的管理YotaPhone。我们从审视传媒伟大的球员创造了它。