2928
Експеримент «Лабораторна робота», або як ми створили роботу з використанням смартфона
Відома мудрість говорить, що краще бачити один раз, ніж читати сто разів. Ми говоримо про нові можливості та переваги другого екрана YotaPhone. Але найбільш зрозумілі описи не порівнюються з можливістю побачити, що це подобається працювати з другим екраном смартфона.
Ми вирішили створити роботу, яка допоможе нам продемонструвати цю ідею. І не просто робот, але спеціально навчений YotaPhone. Ми створили його з великими хлопцями, які дивляться на медіа.
"Лабораторна робота"
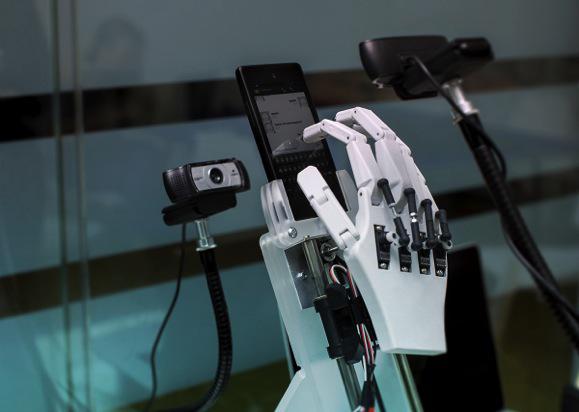
Ми називаємо цей проект Лабораторної роботи. Його сутність полягає в тому, щоб дати кожному можливість дистанційно перевірити деякі функції YotaPhone, використовуючи спеціально створений робот для цього. Реальні, м'якоть і кров'яні пластикові і серводвигуни. І завдяки двох камерах можна подивитися, що відбувається на обох екранах YotaPhone.
У ганчірці процес контролінгу робот був надсилати текст і номер через сайт, а потім дивитися тип роботи і відправити його замість вас. Якщо були певні слова маркеру в тексті, картина створена для цього слово з'явилася на другому екрані.
Під час свого часу як відправник SMS, його користувачі відправили 4 775 повідомлень, з яких 218 були декларації про любов. До речі, були також 65 хакерських спроб.
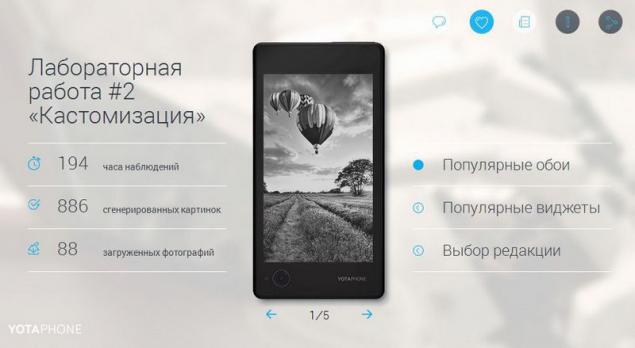
Потім був проведений другий етап тестування: ми змогли дистанційно завантажувати шпалери на другий екран роботи YotaPhone, а також вибрати різні віджети. Робот «збірний» на головному екрані встановлюється набір шпалер і віджетів, а потім підпис жест покладає2back ефективно надіслав його на другий екран. Під час цієї фази користувачі генерували 886 зображень і завантажили 88 фото.
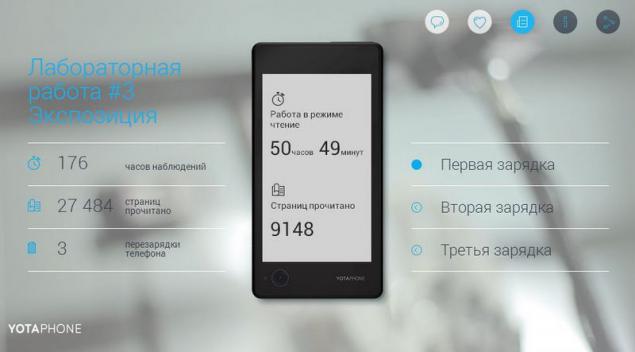
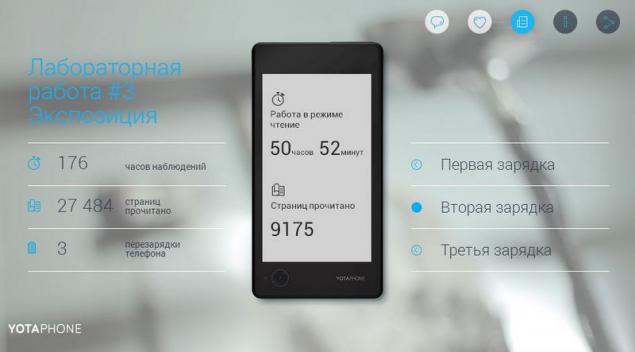
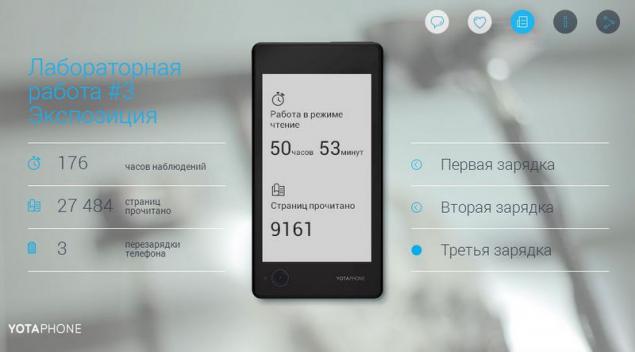
Нещодавно завершився третій етап дистанційного тестування YotaPhone за допомогою роботи. Цього разу ми провели стрес-тест: як довго YotaPhone прослужить від одноразового заряду акумулятора під час читання книги на другому екрані. Літературний джерело був військовим і миром, а швидкість читання була близько 3 сторінок за хвилину. Спеціально для третього етапу ми побудували обруч навколо YotaPhone, який будує підсвічування для другого екрана. Підключається до додаткового Arduino. Будь-який може не тільки дивитися процес читання війни і миру цілодобово, але і змінити інтенсивність освітлення, симулювати ситуації в різні часи дня.
На цьому етапі були проведені три тести, тобто заряджений смартфон працював три рази до повного розряду акумулятора. Ось результати фази три:
Історія створення
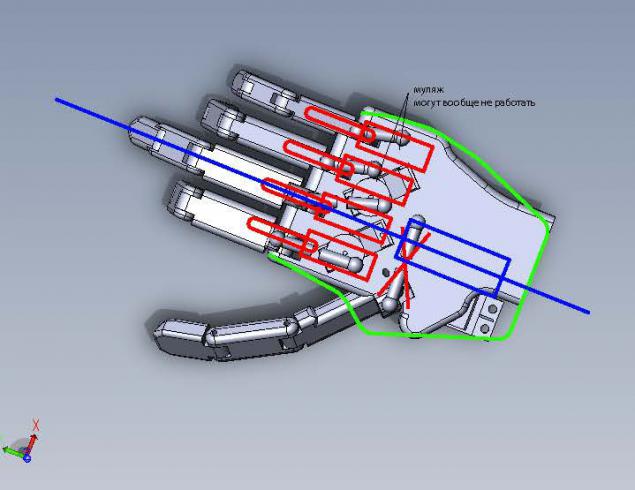
Перш за все, ми вирішили взяти шлях найменшого опору, і ми вивчили open-source-конструкції цих робототехнічних рук, в тому числі навіть такого відкритого проекту. Основним недоліком проекту вважається механізація пальців на основі розтягувальних кабелів. На жаль, це не дозволить отримати бажану точність позиціонування. Ми також любили цей проект, але він не задовольняв ключовий стан, який має руку, тому нам довелося відмовитися. В результаті було прийнято рішення створити роботу власного дизайну.
Прототип
Спочатку ми вирішили зробити проект варіант епоксидної смоли. Відливні частини ножа дали бажану форму, а потім пофарбували в білому кольорі. По-перше, ми хотіли перевірити працездатність конструкції, оцінити розташування і способи кріплення серводвигунів, оцінити амплітуду рухів пальців.
 ,00 Р
,00 Р
Для контролю всіх моторів сервоприйняти рішення використовувати Arduino UNO. Після тестування першої версії прототипу прийшли до наступних висновків:
• Щоб поліпшити точність позиціонування, потрібно видалити сервоприводи від фаланців пальців
• Кожен пальчик повинен контролювати тільки один серво.
• Для шпинделя жест потрібно переконатися, що вся рука переміщається / вниз
Робочі зразки
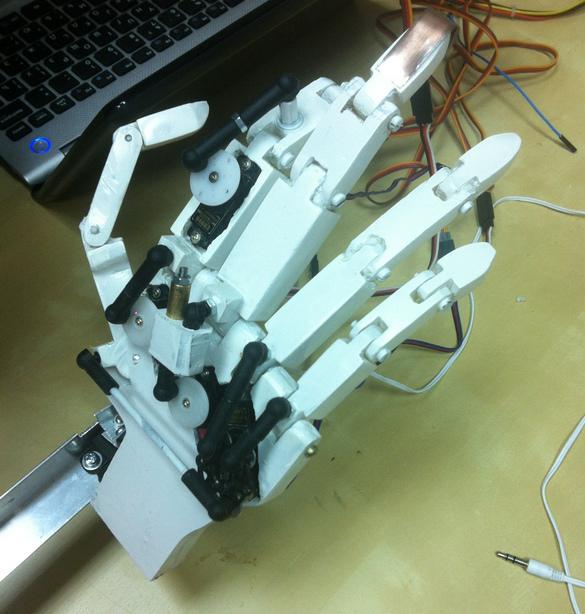
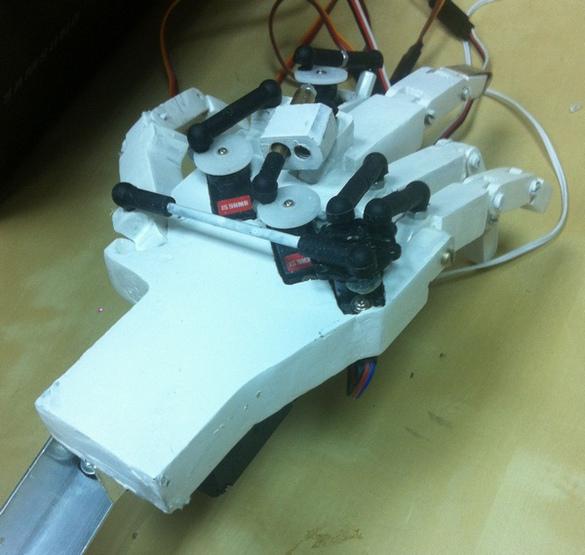
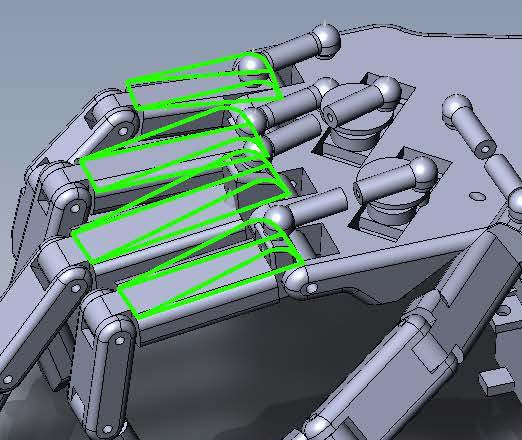
Ми створили 3D моделі 15 частин, які складають руки. Після друку на принтері 3D і складання, тестування проводилося для взаємодії з сенсорним екраном.
 р.
р.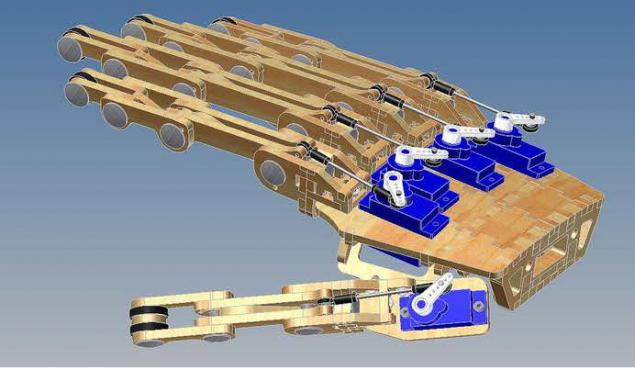
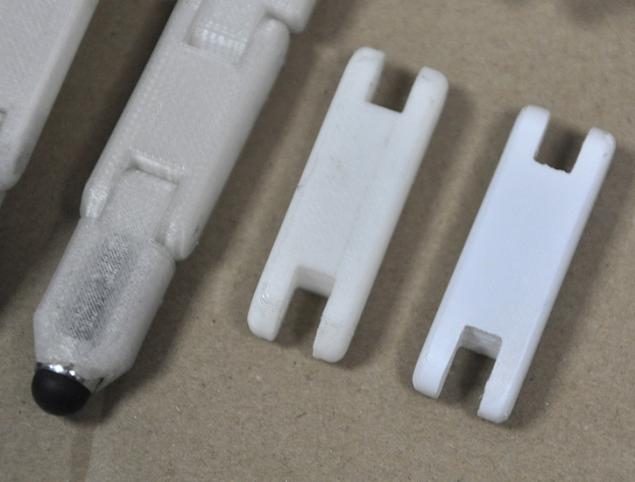
Виявилося, що ємнісний екран не відповідає пластику, з якого робиться рука. Проблема була вирішена шляхом установки кінчиків зрізу від великих діаметрів стилусів в пальцях.
Встановлюється на ручному роторному моторі та сервоприводами, які регулюють пальці. Точність їх не було достатньо для впевненого позиціонування, пальці не потрапили на віртуальні кнопки на екрані смартфона. В результаті необхідно використовувати дорогі сервоприводи для моделей літаків: FUTABA S1353 для пальців і BLS-352 для повороту руки. На додаток до точності позиціонування ми вирішили проблему надійності, тому що рука повинна працювати безперервно протягом трьох тижнів.
Після розв’язання цієї задачі, новий Сама рука прикріплюється до валу крокового двигуна, який кріпиться на рухомій / відкладній платформі. Двигун несе відповідальність за поворот руки навколо осі перпендикулярно площині смартфона. І під час поворотів були сильні вібрації, так як загальна жорсткість дизайну не дозволило компенсувати значний момент інерції. Це знову знизило точність позиціонування пальця. Щоб зменшити вібрації, ми спробували застосувати різні прокладки в суглобах артикулації, але це було неефективно. Необхідно штучно зменшити швидкість поворотного двигуна і ввести невеликі паузи після кожного повороту, щоб встигнути вигасити залишкові коливання.
Несподівана проблема пов'язана з поворотним двигуном. Він був дуже теплом. Це було прийнято рішення про збір проміжного контролера, який повністю закриває двигун під час роботи.
Для поліпшення зовнішнього вигляду роботи надруковано другий робочий зразок блискавки. Перед складанням деталі були додатково пофарбовані білі, щоб надати виробу ще більш елегантний вигляд.
 р.
р.Стенд.
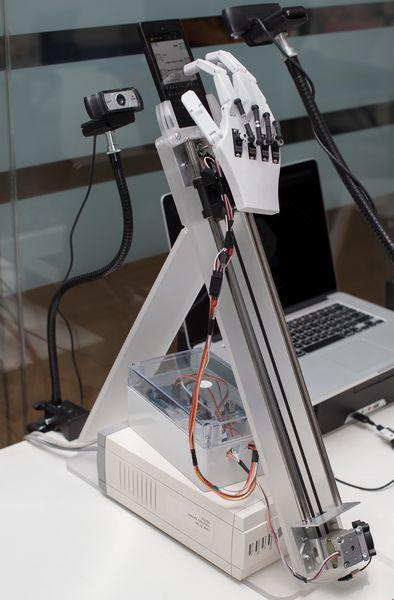
Смартфон, з яким робот повинен працювати, було прийнято рішення розмістити під нахилом, оскільки він зазвичай тримається людиною, а не вертикально або горизонтально. Виготовляючи з цього, стійку у вигляді правого трикутника був розроблений, гіпотензією якого складається з двох напрямних, разом з якими платформа рухається з рукою.
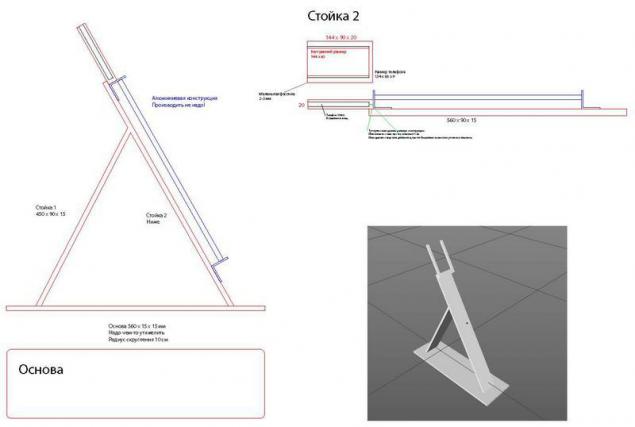
Стійка виконана з білого пластику. Платформа з ручкою підключена стрічкова передача з кроковим двигуном, завдяки яким платформа рухається вздовж керівництва.

Програма
Після видалення всіх електронних механічних перешкод, ми переїхали на налагодження програмної частини проекту. В рамках проекту ми подали заявку на сайті. Інформація від клієнта надходить на наш сервер, на якому встановлено Ruby 2.0.0 Rails 4 MySQL. Сервер збирає запити користувачів і формує чергу завдання для роботи. Сервер надсилає цю інформацію на локальну програму управління, написану нами в NodeJS. Всі дані передаються в форматі JSON. Далі завдання перетворюються на конкретні команди Arduino, до яких безпосередньо підключений робот. Взаємодія з Arduino через бібліотеку voodootikigod/node-serialport.
Крім того, програма управління отримує зворотний зв'язок з спеціально письмовим клієнтом, що працює безпосередньо на смартфоні. Цей клієнт відстежує координати кліків, і якщо виявлена невідповідність, програма контролю виконує перерахунок.
Третя функція призначена для запису відео фрагментів, які захоплюють виконання кожного завдання. Для відеозапису камери Logitech C920 встановлюються на гнучких тримачах. Під час першого етапу проекту програма керування отримала інформацію про надсилання SMS з модуля клієнта на смартфоні. Послідовність відео з камер було записано за допомогою програми WireCast, після чого з нього було виділено відповідний фрагмент відео та посилання на нього.
Щоб зберегти час, ми вирішили не створювати власний API для масового відеомовлення, але замість цього використовували готовий рішення від CDNvideo. Тим не менш, через те, що їх API ще не повністю знеболюється, за деякий час ми мали проблеми з збереженням відео фрагментів. В даний час розробник подав нам нову, повну версію API.
В цілому, ми виготовили два роботи, які безпосередньо брали участь у публічному тестуванні YotaPhone. Останній зразок був трохи модернізований: потрібно було змінити місце кріплення поворотного двигуна до руки, щоб робот міг зробити жест флипсування екрана (попередня).
Висновок
Впровадження цього проекту було дуже цікавим для нас. Уміння творчо розв’язати нестандартну проблему, створити новий і повністю універсальний пристрій, дивитися, як працює робота «живого» життя завдяки інтересам користувачів – все це дуже близько в дусі нашої роботи на YotaPhone.
Ми хочемо подарувати всім можливість особисто спробувати те, що це – смартфон з двома екранами. Почуйте телефон у руці, оціните відповідь екрану на електронну чорнило. На жаль, це неможливо. Але ми вважаємо, що навіть віддалена, але самостійна взаємодія з смартфоном дозволяє краще зрозуміти переваги другого екрана. Ми вважаємо, що можливість такого інтерактивного тестування YotaPhone є набагато більш чесним, ніж лизати господарі. Що ви думаєте? Ми дуже зацікавлені в тому, щоб почути вашу думку.
Джерело: habrahabr.ru/company/yotadevices/blog/223543/






















На шляху до гірського гострого каріосту пробурено піщаний камінь і «зніміть» лазер
Мишей необхідно сушити.