2928
Experimento "Lab", o como hemos creado un robot, utilizar los smartphones
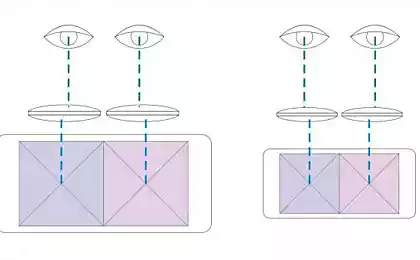
Remake del famoso proverbio dice que es mejor ver una vez que leer un centenar de veces. Hablamos mucho sobre las nuevas características y beneficios que le da una segunda YotaPhone pantalla. Pero la introducción más fácil de usar, no se puede comparar con la capacidad de ver lo que es -. Para trabajar con la segunda pantalla del teléfono inteligente
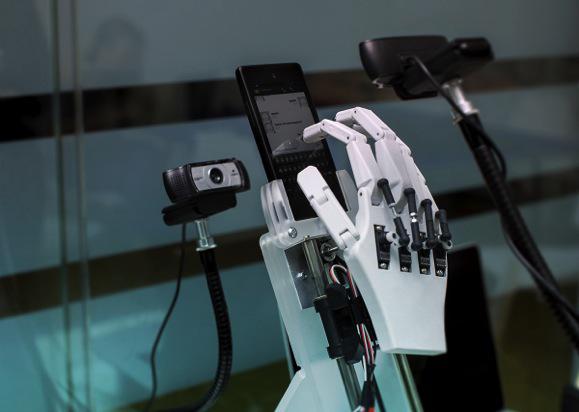
Y hemos decidido crear un robot que ayudaría a demostrar la idea. Y no sólo un robot y capacitado para gestionar YotaPhone. Hemos creado en las grandes chicos de mirada a los medios de comunicación.
«laboratorio» h4>
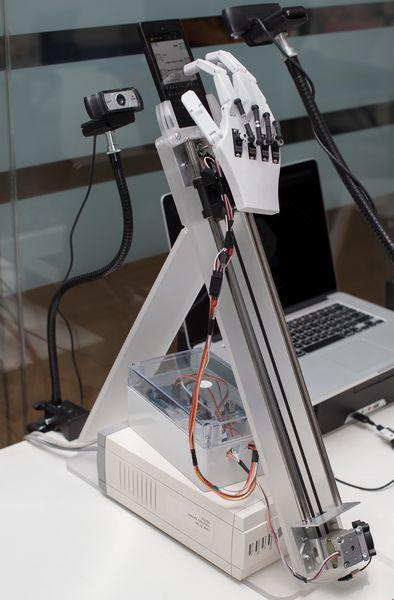
Este proyecto nos llama « Lab ». Su esencia es permitir a todo el mundo para poner a prueba de forma remota algunas funciones YotaPhone utilizando especialmente creados para este robot. Muy real, de carne y hueso, plástico y servos. Y gracias a dos cámaras pueden observar lo que está sucediendo en ambas pantallas YotaPhone.
En pocas palabras, el proceso de controlar el robot era: a través de la página web se puede enviar mensajes de texto SMS y el número, y luego observar cómo los frunces robot y lo envía para usted. Si el texto incluye ciertos marcadores de las palabras, a continuación, en la segunda pantalla hay un cuadro creado para esta palabra.
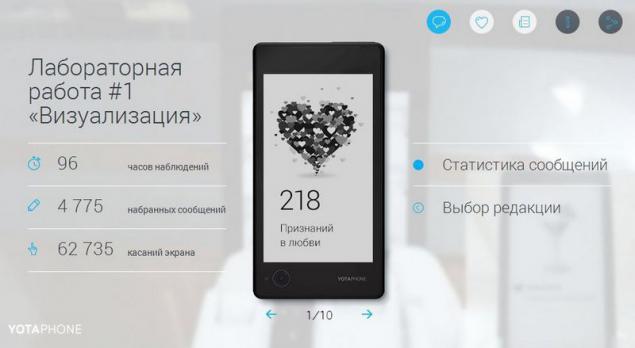
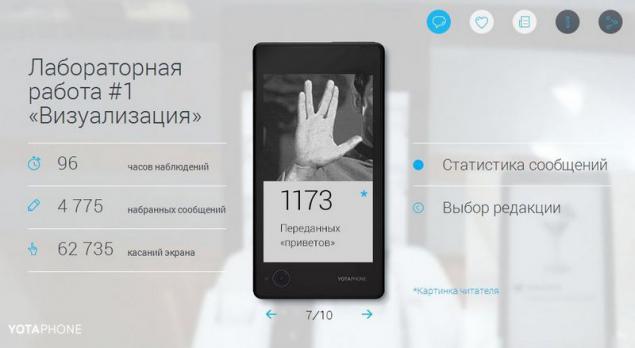
Durante el funcionamiento del robot, como el SMS remitente, nuestros usuarios enviaron con él 4.775 puestos, de los cuales 218 eran declaraciones de amor. Por cierto, también 65 intentos de piratería era.
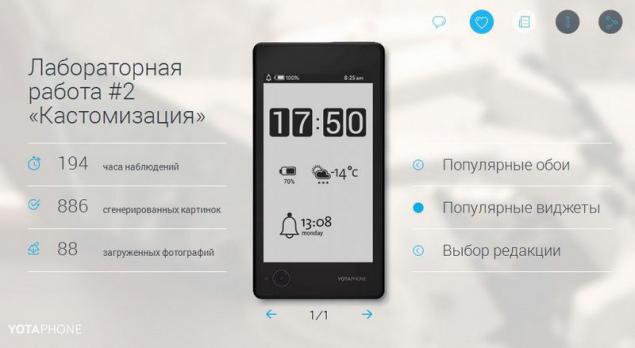
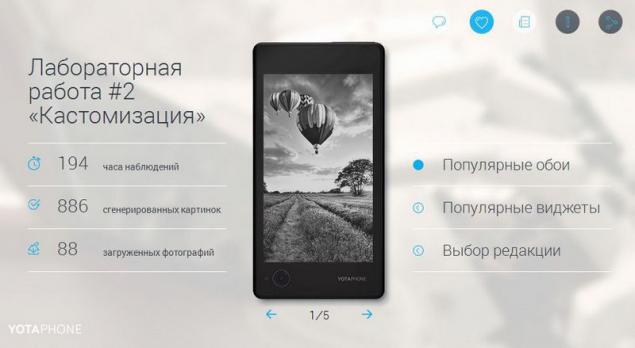
A continuación, se llevó a cabo la segunda fase de las pruebas, se nos dio la oportunidad de descargar a distancia el papel tapiz de su segunda pantalla perteneciente al YotaPhone robot, y también elegir diferentes widgets. Robot "recoger" en el fondo de la pantalla principal y un conjunto de widgets, y luego hizo un gesto put2back marca envía efectivamente a la segunda pantalla. Durante esta fase, los usuarios han generado y cargado 886 imágenes 88 imágenes.
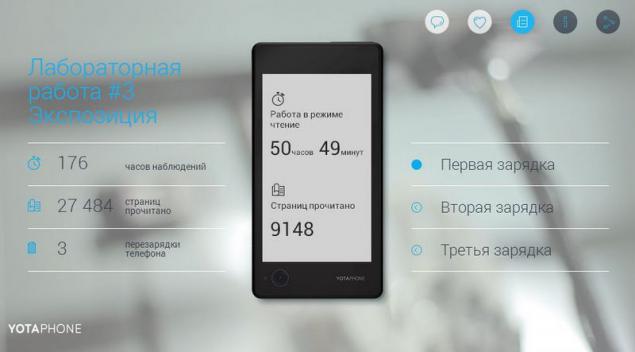
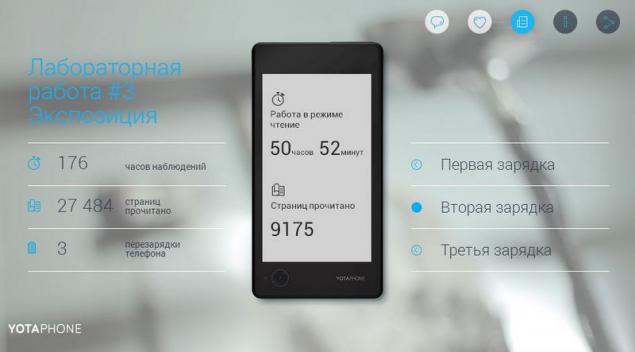
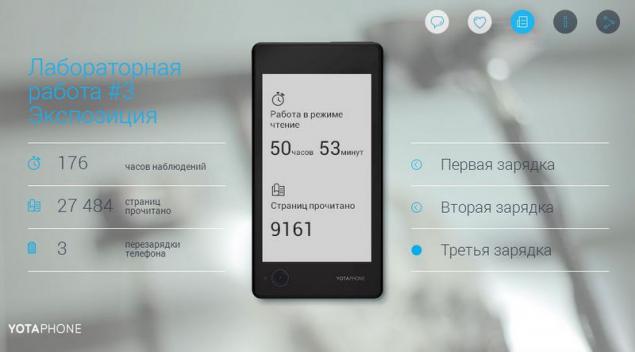
Recientemente completó la tercera fase de pruebas remotas YotaPhone todos los interesados por un robot. Esta vez tuvimos una prueba de estrés: ¿cuánto tiempo va a durar YotaPhone con una sola carga de la batería durante la lectura de un libro en la segunda pantalla. En el papel de una fuente literaria actuado "Guerra y Paz", y la velocidad de la "lectura" era de 3 páginas por minuto. Especialmente para la tercera etapa que hemos construido alrededor de aro YotaPhone que aloja las luces para una segunda pantalla. Está conectado a la Arduino opcional. Cualquiera podía no sólo durante todo el día para observar el proceso de lectura de "Guerra y paz", sino también para cambiar la intensidad de la iluminación, la simulación de situaciones para las diferentes horas del día.
Durante esta fase, hubo tres ensayos, que tres veces el smartphone está cargado trabajó para descargar completamente. Aquí están los resultados de la tercera etapa:







Historia h4>
En primer lugar, decidimos tomar el camino de menor resistencia y examinar disponible en acceso abierto proyectos listos como brazos robóticos, incluyendo incluso tal proyecto con código abierto. El principal defecto de los proyectos se basa en los dedos de mecanización cables tensados. Desafortunadamente, no sería lograr la precisión de posicionamiento deseado. También nos gustó este proyecto, pero no conocer las condiciones clave - Disponibilidad manos - por lo que de él también fue abandonado. Como resultado, se decidió construir un robot de su propio diseño.
Prototipo
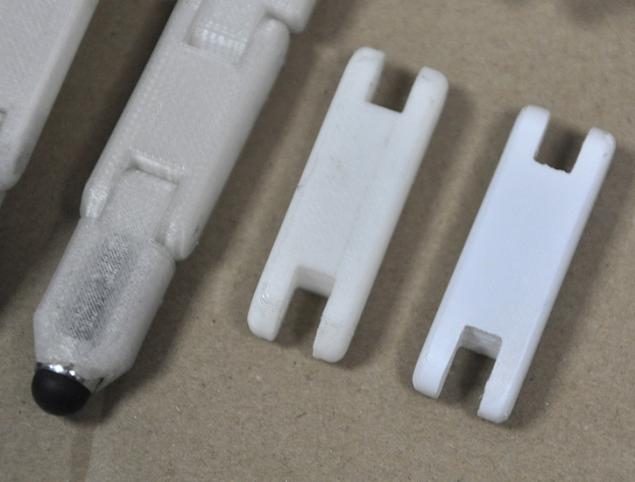
En primer lugar, hemos decidido hacer un proyecto de la resina epoxi. Piezas moldeadas con un cuchillo dieron la forma deseada y, a continuación, pintados de blanco. En primer lugar, queríamos probar la funcionalidad del diseño, para estimar la localización y métodos de servomotores de fijación, para evaluar el rango de movimiento de los dedos.

Para gestionar todos los servos decidió utilizar Arduino UNO. Después de probar la primera versión del prototipo llegó a las siguientes conclusiones:
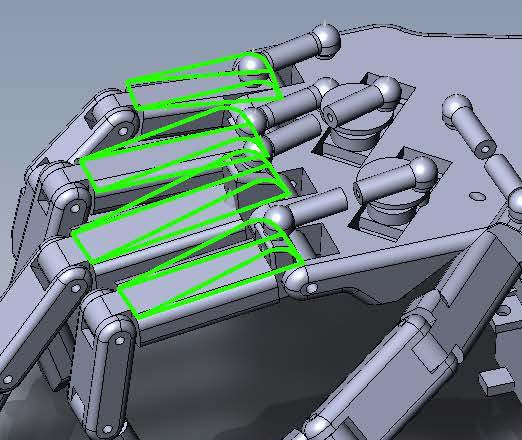
• Para aumentar la precisión de posicionamiento es necesario quitar los servos con falanges
• Cada dedo debe ser controlado por un solo servo
• Por el gesto de deslizar es necesario para asegurar el movimiento de todo el brazo hacia arriba / abajo
Muestras de trabajo
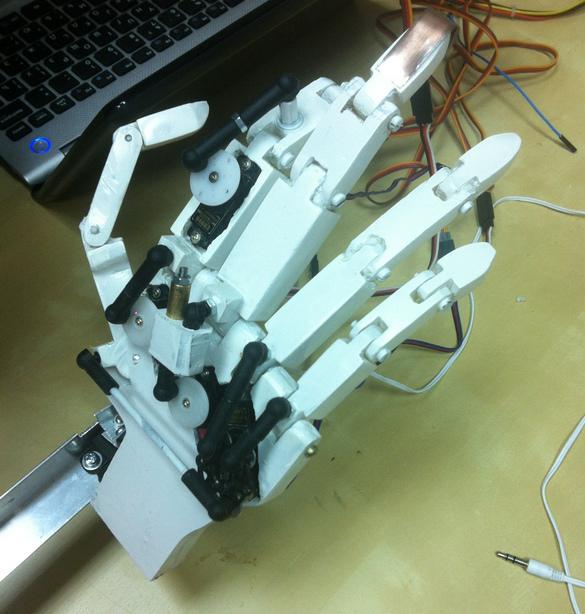
En SolidWorks CAD-paquete creamos 3D-modelo de 15 partes, de las cuales la mano. Después de imprimir en -impresora 3D y montaje pruebas realizadas en la interacción con la pantalla táctil.
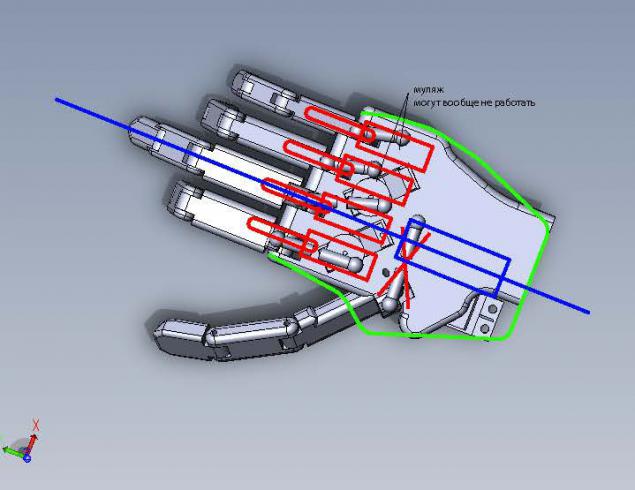
Resultó que la pantalla capacitiva no responde al plástico del que está hecho el brazo. El problema se resolvió mediante el establecimiento de los dedos cortados agujas con punta de gran diámetro.
Ubicado en un motor de brazo giratorio y servos que controlan los dedos. Su precisión era insuficiente para los dedos de posicionamiento fiables atrapados en los botones virtuales en la pantalla de su smartphone. Como resultado, fue necesario utilizar servos costosos, producidos por modelos de aviones: Dedo FUTABA S1353 y BLS-352 para girar la mano. Además de la colocación de la precisión y decidimos el problema de la fiabilidad, ya que la mano debería haber estado trabajando de forma continua durante tres semanas.
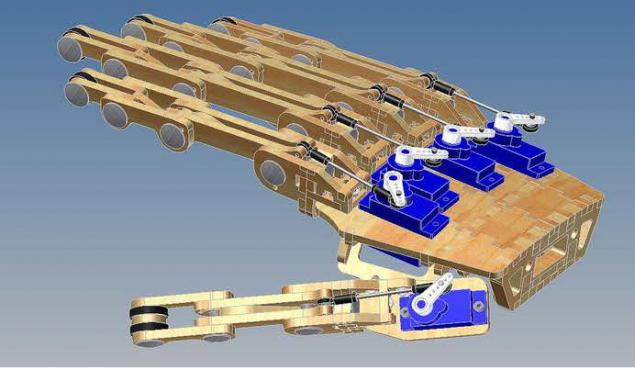
Después de resolver este problema comenzó a resolver uno nuevo. Propia mano montado en el eje del motor paso a paso, que está montado en la plataforma movible hacia arriba / abajo. El motor es responsable de convertir el brazo alrededor de un eje perpendicular al plano del teléfono inteligente. Y durante los giros vibra mal, porque la rigidez global de la estructura no es posible compensar hay un momento de inercia significativa. Esto conduce de nuevo a una disminución en la precisión de la colocación de los dedos. Para reducir la vibración, probamos diferentes juntas de articulación, pero fue ineficaz. Tuve que reducir artificialmente la velocidad del motor rotativo y entrar en una pequeña pausa después de cada turno para seguir el ritmo de extinguir vibración residual.
Un problema inesperado fue conectado con el motor rotativo. Se calentó mucho. Se decidió a montar el controlador intermedio que apaga completamente el motor durante el ralentí.
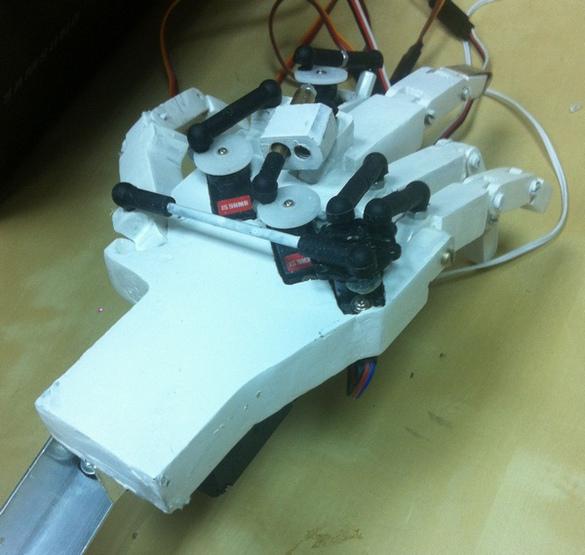
Para mejorar la apariencia de la muestra de segundo robot de trabajo impresa de un encendedor de plástico. Antes del montaje más detalles pintados en blanco para dar al producto un aspecto aún más elegante.

delante
Smartphone con la que el robot tiene que trabajar, se decidió colocar oblicuamente, ya que por lo general mantiene a una persona, no en vertical u horizontal. Sobre la base de este bastidor ha sido diseñado en la forma de un triángulo rectangular la hipotenusa de que comprende dos carriles en la que la plataforma se mueve con la mano.
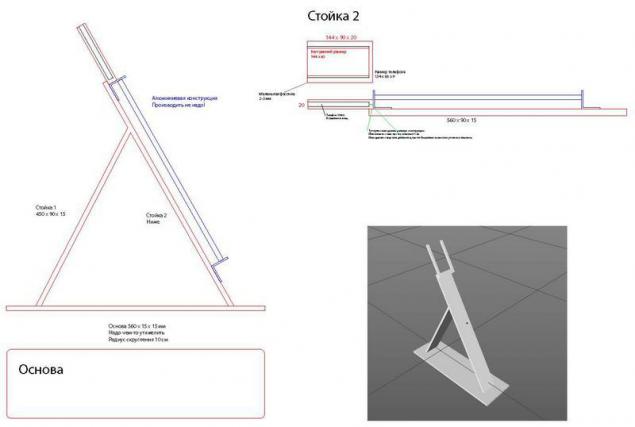
Bastidor fabricado en plástico blanco. La plataforma está conectado al motor paso a paso de accionamiento por correa mano, de que la plataforma se mueve a lo largo de los carriles de guía.

La parte de software
Después de la eliminación de todas las barreras electromecánicos, pasamos a depurar la parte de software del proyecto. A medida que el lado del cliente que hemos escrito una pequeña aplicación web en JavaScript. Información del cliente llega a nuestro servidor que ejecuta Rubí 2.0.0 Rails 4 MySQL. El servidor recoge las peticiones del usuario y genera todas las tareas del robot. Esta información, el servidor envía una aplicación administrada localmente por escrito por nosotros en NodeJS. Todos los datos se transmiten en el formato JSON. Otros objetivos se transforman en instrucciones específicas para Arduino, que está conectado directamente al robot. Interacción con bibliotecas Arduino realizadas por voodootikigod / nodo-serialport i>.
Además, la aplicación de gestión recibe información de un cliente escrito especialmente correr directamente en el smartphone. Este cliente mantiene un registro de las coordenadas de los clics, y si se detecta una discrepancia, la aplicación de control realiza dokalibrovku.
Tercera función encomendada a la aplicación de gestión, es para grabar películas, las cuales representaban la ejecución de cada tarea. Para utilizar la cámara de vídeo , consagrado en gibkih titulares . Durante el paso de la primera fase de la aplicación de gestión de proyectos recibe desde el módulo de cliente en la información de su smartphone en el envío de SMS. Visuales con la cámara graba utilizando wirecast, que se cortó más lejos de la videoclip correspondiente y lo vinculan envía al usuario.
Para ahorrar tiempo, hemos decidido crear su propia API para transmisión de video en masa, y en su lugar utilizó la solución de ready-made de la empresa CDNvideo. Sin embargo, debido al hecho de que su API no ha sido aún pulido algún tiempo hemos tenido problemas con las películas de preservación. Al final, el desarrollador nos ha proporcionado una nueva versión, completamente de trabajo de la API.
En total, hemos hecho dos robots que participaron directamente en YotaPhone pruebas públicas. La última muestra fue ligeramente modernizada: que era necesario cambiar el lugar de unión del motor rotativo en el brazo, el robot podría hacer un gesto de desplazamiento de la pantalla (golpe)
.
Conclusión
Este proyecto fue para nosotros una ocupación fascinante. Capacidad para resolver creativamente el problema de la no-estándar, la creación de un dispositivo nuevo y bastante universales, viendo cómo el robot "vive" de su vida gracias al interés de los usuarios, - todo esto está muy cerca en espíritu a nuestro trabajo en YotaPhone
.
Nos gustaría dar a todos la oportunidad de probar personalmente lo que es - un smartphone con dos pantallas. Siente el teléfono en la mano, para evaluar la respuesta de la pantalla de tinta electrónica. Desafortunadamente, es imposible. Pero estamos seguros de que, aunque a distancia, pero la interacción independiente con el teléfono inteligente permite una mejor comprensión de los beneficios de la segunda pantalla. Creemos que la posibilidad de una prueba tan interactivo YotaPhone mucho más honesto en comparación con los comerciales lamido. Qué piensas? Estamos muy interesados en conocer su opinión acerca de este proyecto.
Fuente: habrahabr.ru/company/yotadevices/blog/223543/


































En el camino hacia el Monte de Sharp Curiosidad perforado arenisca y láser "disparar"
Pads necesitan ser secados