1028
Вимкніть кордон між роботою та людиною (23 фото)
Токіо регулярно проводить міжнародні виставки роботів, де найбільша увага привертає моделі роботів для андроїд. Хоча розвиток таких роботів все ще на ранніх стадіях, деякі вже дуже схожі на людину. Зайдіть погляд.
1,1 км Працівник Музею науки грає з роботом БЕРТІ в "кампан-ножиці" в Лондоні, 17 лютого 2009 р. БЕРТІ було побудовано спеціально для імітації жести людини. (Peter Macdiarmid - AFP/Getty Images)
2. Робот HRP-4C на виставці цифрового контенту в Токіо, 22 жовтня 2009 року. (Toru Hanai - Reuters)

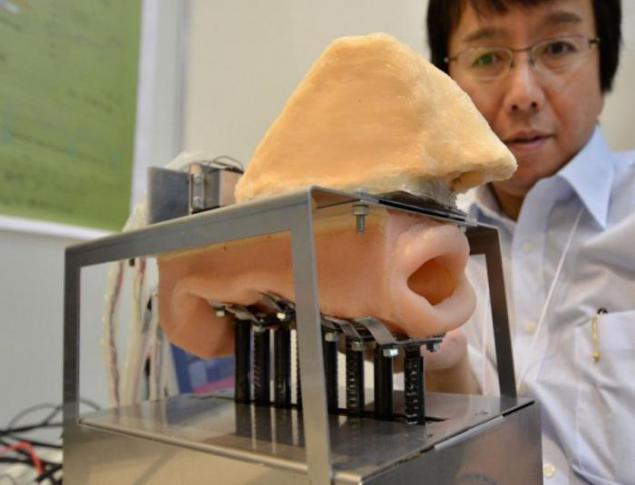
3. У Стоматологічна поїздка по роботі з пацієнтом Ганако Шова в Шоваському університеті в Токіо, 25 березня 2010 року. (Koichi Kamoshida - AFP/Getty Images)

4. Університет Токіо студент Hikari Asano і аналогічний робот Пікарін в м'язово-міцному костюмі на виставці в Токіо, 3 жовтня 2007. Університет створив робот, який може мити емоції, такі як щастя, радість, небезпека, страх і сюрприз. (Yoshikazu Tsuno - AFP/Getty Images)

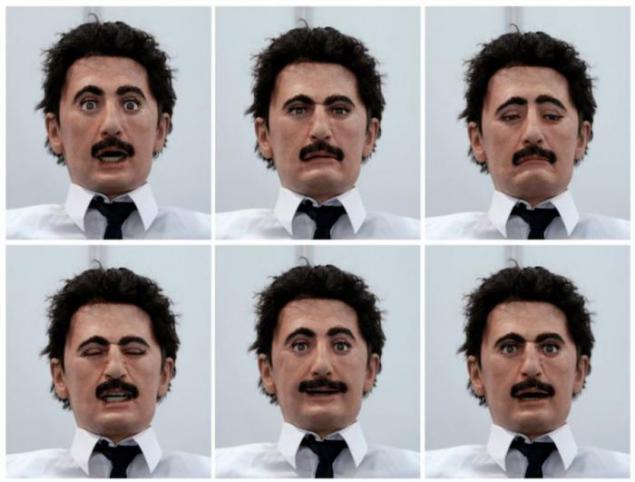
5. Умань Роботи Сая та школярі під час демонстрації роботи на елементарній школі в Токіо, 7 травня 2009 року. Робот, розроблений професором Хіроші Кобайші, може говорити різні мови та міміміку різних виразів обличчя. (Issei Kato - Reuters)

6. Жнівень 17 жовтня 2010 р. на виставці Digital Contents Expo в Токіо. (Yoshikazu Tsuno - AFP/Getty Images)

7. Камерон Філіпс на виставці Terminator у Токіо, 18 березня 2009. (Yoshikazu Tsuno - AFP/Getty Images)

8. У Анжела Меркель і робот "Космічний Джастін" на виставці ILA в Берліні, 8 червня 2010 р. (Johannes Eisele - AFP/Getty Images)

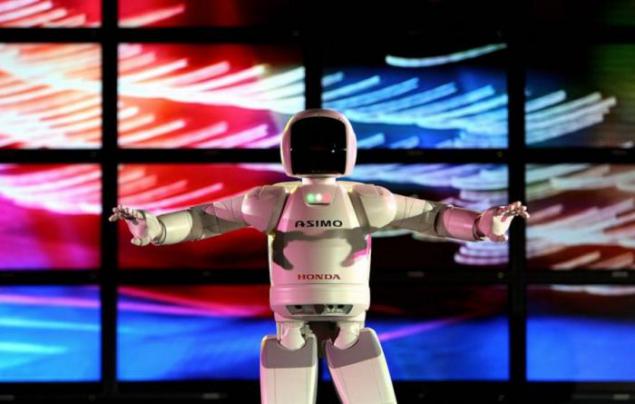
9. Навігація ASIMO, створений Honda, танець на сцені Сіднея, 21 листопада 2007 року. (Greg Wood - AFP/Getty Зображення)
10. Робот «Кавасакі» показує експресію «щастя» (одна з 36) під час демо-лабораторії Університету Меджи в Кавасакі, 4 червня 2007 року. (Юрійко Накао - Реутери)
3610Р. 4200Р.
11. Роботи Вакамару виконуються разом з акторами Мінако Інуе та Хіроші Ота на попередньому експериментальному театрі людини та роботів, 25 листопада 2008 року. (Yoshikazu Tsuno - AFP/Getty Images)
937159
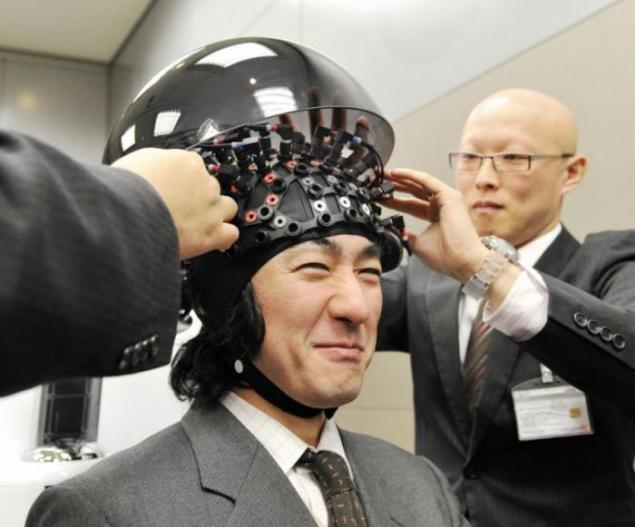
12. Людина зношує спеціальний пристрій для запису мозкових струмів на голову, 31 березня 2009 року. Японці створили інтерфейс, з яким можна керувати діями роботи «Асімо» за допомогою думки. (Yoshikazu Tsuno - AFP/Getty Images)
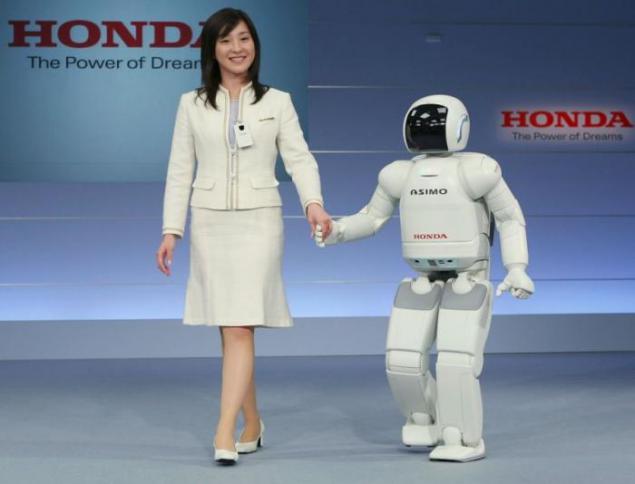
13.00 р. Робот ASIMO на прес-конференції в Токіо, 13 грудня 2005 р. Завдяки поліпшенню, робот може ходити тримаючи руки, бігти на швидкості 6 км / год, виконувати речі, розкачати кошик і запустити в колах. (Koichi Kamoshida - AFP/Getty Images)
14. Робот, створений Тайбей, 19 жовтня 2010 р. (Nicky Loh - Reuters)
15.00 р. Дизайнер покладає мангал на роботі, роблячи його схожим на відомий японський бактеріолог Hideo Noguchi, 2 березня 2009 року. (Yoshikazu Tsuno - AFP/Getty Images)

16. Презентація роботи REEM-B, створеного за технологією Пал, Абу-Дабі, ОАЕ, 11 червня 2008 р. Високий робот 147 може ходити і навігації в будівлях, взаємодіяти з об'єктами, приймати голосові команди і розпізнати особи. (Stringer - AFP / Getty Зображення)

17.00 р. Модель торкається обличчя роботи Geminoid-F на прес-конференції в Осаці 3 квітня 2010 р. (Yoshikazu Tsuno - AFP/Getty Images)
 Р
Р
18 років З 27 листопада 2007 року в університеті імені Веда (Твенді-один робот), що був розроблений Університетом Веда, займає частину хліба з тостеру на демонстрації в лабораторії, Токіо. (YOSHIKAZU TSUNO Yoshikazu Tsuno - AFP/Getty Зображення)
76989898.
19.00 р. Кагава університет професора Хідюка Садаба (Kagawa University) – це розмова та співацька робота, вокальний пуповинний публіцистичний виступ. 13 липня 2011 р. (Yoshikazu Tsuno - AFP/Getty Images)
20. Робот «Я-Файрі» відвідує весілля як свідка, Токіо, 16 травня 2010 року. (Юрійко Накао - Реутери)

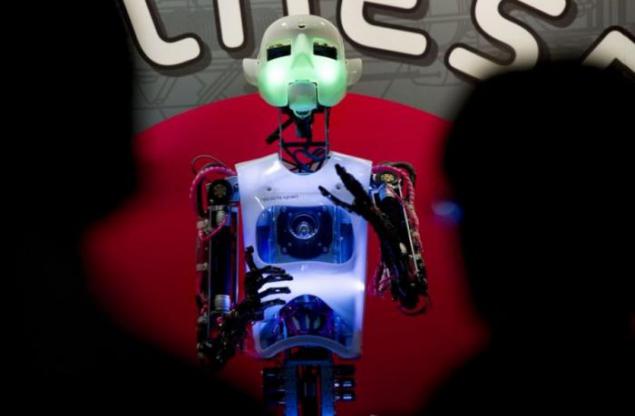
21. Відвідувачі ІТ-виставки CeBIT бачать роботу «РобоThespian», створеного для навчання, розваг та спілкування. Ганновер, 1 березня 2011 р. (Johannes Eisele - AFP/Getty Images)
22. Дитина виглядає на роботі Nao, створеному Aldebaran Robotics на виставці InnoRobo в Ліоні, Франція, 23 березня 2011 року. (Philippe Merle - AFP/Getty Images)

23. Роботи системи дистанційного керування на виставці в Токіо, 9 листопада 2011 р. Робот, розроблений компанією Kyokko Electric, регулюється дистанційно з використанням рукавичок і 3D-скел. (Yoshikazu Tsuno - AFP/Getty Images)

1,1 км Працівник Музею науки грає з роботом БЕРТІ в "кампан-ножиці" в Лондоні, 17 лютого 2009 р. БЕРТІ було побудовано спеціально для імітації жести людини. (Peter Macdiarmid - AFP/Getty Images)

2. Робот HRP-4C на виставці цифрового контенту в Токіо, 22 жовтня 2009 року. (Toru Hanai - Reuters)

3. У Стоматологічна поїздка по роботі з пацієнтом Ганако Шова в Шоваському університеті в Токіо, 25 березня 2010 року. (Koichi Kamoshida - AFP/Getty Images)

4. Університет Токіо студент Hikari Asano і аналогічний робот Пікарін в м'язово-міцному костюмі на виставці в Токіо, 3 жовтня 2007. Університет створив робот, який може мити емоції, такі як щастя, радість, небезпека, страх і сюрприз. (Yoshikazu Tsuno - AFP/Getty Images)

5. Умань Роботи Сая та школярі під час демонстрації роботи на елементарній школі в Токіо, 7 травня 2009 року. Робот, розроблений професором Хіроші Кобайші, може говорити різні мови та міміміку різних виразів обличчя. (Issei Kato - Reuters)

6. Жнівень 17 жовтня 2010 р. на виставці Digital Contents Expo в Токіо. (Yoshikazu Tsuno - AFP/Getty Images)

7. Камерон Філіпс на виставці Terminator у Токіо, 18 березня 2009. (Yoshikazu Tsuno - AFP/Getty Images)

8. У Анжела Меркель і робот "Космічний Джастін" на виставці ILA в Берліні, 8 червня 2010 р. (Johannes Eisele - AFP/Getty Images)

9. Навігація ASIMO, створений Honda, танець на сцені Сіднея, 21 листопада 2007 року. (Greg Wood - AFP/Getty Зображення)

10. Робот «Кавасакі» показує експресію «щастя» (одна з 36) під час демо-лабораторії Університету Меджи в Кавасакі, 4 червня 2007 року. (Юрійко Накао - Реутери)
3610Р. 4200Р.
11. Роботи Вакамару виконуються разом з акторами Мінако Інуе та Хіроші Ота на попередньому експериментальному театрі людини та роботів, 25 листопада 2008 року. (Yoshikazu Tsuno - AFP/Getty Images)
937159
12. Людина зношує спеціальний пристрій для запису мозкових струмів на голову, 31 березня 2009 року. Японці створили інтерфейс, з яким можна керувати діями роботи «Асімо» за допомогою думки. (Yoshikazu Tsuno - AFP/Getty Images)

13.00 р. Робот ASIMO на прес-конференції в Токіо, 13 грудня 2005 р. Завдяки поліпшенню, робот може ходити тримаючи руки, бігти на швидкості 6 км / год, виконувати речі, розкачати кошик і запустити в колах. (Koichi Kamoshida - AFP/Getty Images)

14. Робот, створений Тайбей, 19 жовтня 2010 р. (Nicky Loh - Reuters)

15.00 р. Дизайнер покладає мангал на роботі, роблячи його схожим на відомий японський бактеріолог Hideo Noguchi, 2 березня 2009 року. (Yoshikazu Tsuno - AFP/Getty Images)

16. Презентація роботи REEM-B, створеного за технологією Пал, Абу-Дабі, ОАЕ, 11 червня 2008 р. Високий робот 147 може ходити і навігації в будівлях, взаємодіяти з об'єктами, приймати голосові команди і розпізнати особи. (Stringer - AFP / Getty Зображення)

17.00 р. Модель торкається обличчя роботи Geminoid-F на прес-конференції в Осаці 3 квітня 2010 р. (Yoshikazu Tsuno - AFP/Getty Images)
 Р
Р18 років З 27 листопада 2007 року в університеті імені Веда (Твенді-один робот), що був розроблений Університетом Веда, займає частину хліба з тостеру на демонстрації в лабораторії, Токіо. (YOSHIKAZU TSUNO Yoshikazu Tsuno - AFP/Getty Зображення)
76989898.
19.00 р. Кагава університет професора Хідюка Садаба (Kagawa University) – це розмова та співацька робота, вокальний пуповинний публіцистичний виступ. 13 липня 2011 р. (Yoshikazu Tsuno - AFP/Getty Images)

20. Робот «Я-Файрі» відвідує весілля як свідка, Токіо, 16 травня 2010 року. (Юрійко Накао - Реутери)

21. Відвідувачі ІТ-виставки CeBIT бачать роботу «РобоThespian», створеного для навчання, розваг та спілкування. Ганновер, 1 березня 2011 р. (Johannes Eisele - AFP/Getty Images)

22. Дитина виглядає на роботі Nao, створеному Aldebaran Robotics на виставці InnoRobo в Ліоні, Франція, 23 березня 2011 року. (Philippe Merle - AFP/Getty Images)

23. Роботи системи дистанційного керування на виставці в Токіо, 9 листопада 2011 р. Робот, розроблений компанією Kyokko Electric, регулюється дистанційно з використанням рукавичок і 3D-скел. (Yoshikazu Tsuno - AFP/Getty Images)