1028
因为我们没有一个机器人
亲爱的朋友们!我想炫耀一点点地在开发机器人本体后卫上的履带分享我们的经验。
大图像下切。
在安全性的问题,应该有地方是不可能的样子。设置在相机上的每一个角落并不总是可能的(并且不总是“不起”),并避免“盲区”,即使当貌似全覆盖并不总是可能的。而人的因素和不值得一提。
因此,巡逻对象比比皆是,地势险要和大量潜在的盲点 - 度假住宅,购物和商务中心,仓库 - 越来越多地提供特殊用途的机器人卫兵
。
因此,配备了运动传感器,温度,烟雾等,还有一台摄像机的机器人可以从你的智能手机来控制,当触发报警 - 先检查一下什么是真正危险的发生在工厂,甚至再做出决定 - 是否会导致快速响应<溴/>
任务制定住房和安装机箱,这款机器人由大型无线电控制箱购买,被摆在我们面前的可用电子元件和底盘的基础上 - 工业设计工作室 FORMA A >。一般概念和参与公司X-炫龙电子元器件的开发。

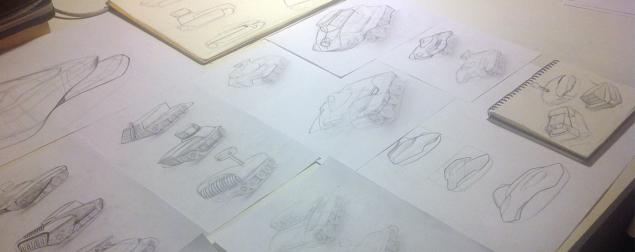
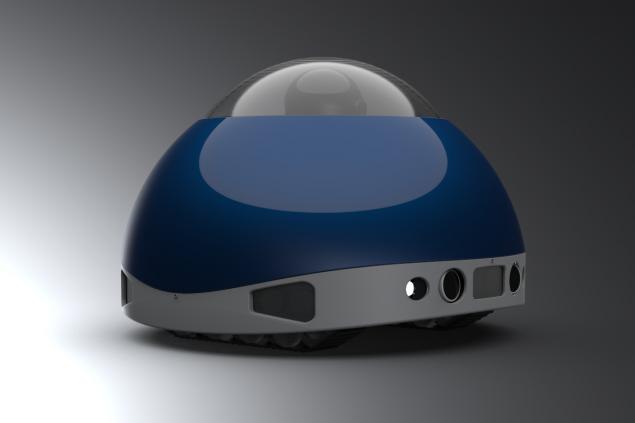
工作开始对机器人同级的一般信息的收集。确定文体的发展趋势,选择材料和制造技术,然后开始初步检索。建议超过三十几选项被选中一个方向 - 友好,简单的形式,从坦克的风格,这成为基础上进一步发展的最远处。结果 - 一个非常简洁的外观,实用,不显眼的房屋安全地隐藏了复杂的电子和机械。车厢额外装备落后解决了经典zadnemotornyh“菲亚特”的风格。帽用于主摄像机由透明的聚碳酸酯。机器人的形状和用于其生产的材料必须确保家具或昂贵的设备不会被他们破坏,谁都有小孩子喜欢这个机器人,因为它让我想起最喜欢的卡通人物,既不能伤了它自己,否则容易“受伤”它。

第一实施例的尺寸来确定由客户底盘中提供的尺寸,原型的三维模型的基础上发展已经太长 - 直径500毫米,以原形它是昂贵的。因此,工作室的工作人员的身体健身球的基础与聚酯树脂和增强网在由自己。透明帽成型有机玻璃。概念和信息检索到布局的最后整理样机的研制历时5个月。机箱的布局显示在2014年的CeBIT汉诺威。

测试的第一个原型发现了一些已经在进一步的工作过程中被淘汰的缺点。机器人的直径减小到350毫米,现在是适当的不仅要看大的站点,而且在家里。
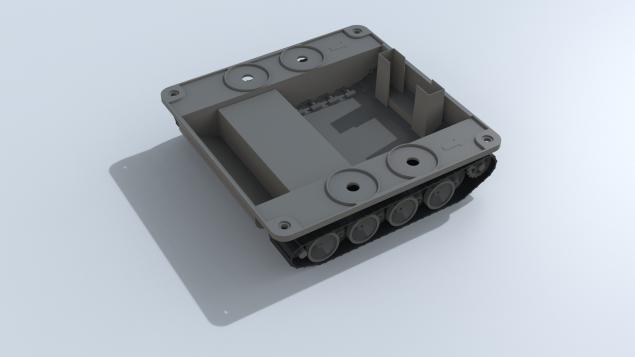
机器人的基础已经奠定了新的底盘充当承重结构,其中固定电机,电池,存储卡,无线模块。也安装在该下壳体部的底盘上(制造技术 - 注塑,被设计以形成双组分的模具)。对所得到的组件安装所有必要的传感器和一对立体声。图案化橡胶垫片允许安装不同版本的主室。
实际上,底盘和所述主体的下一部分:
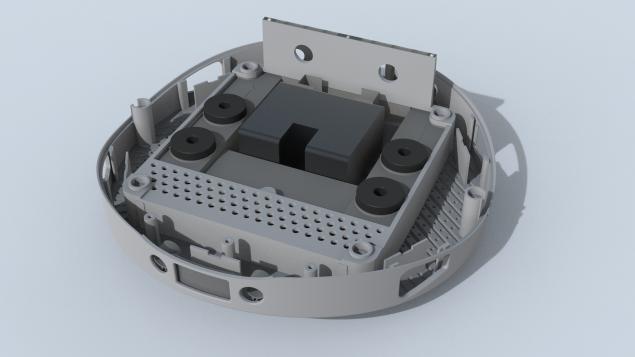
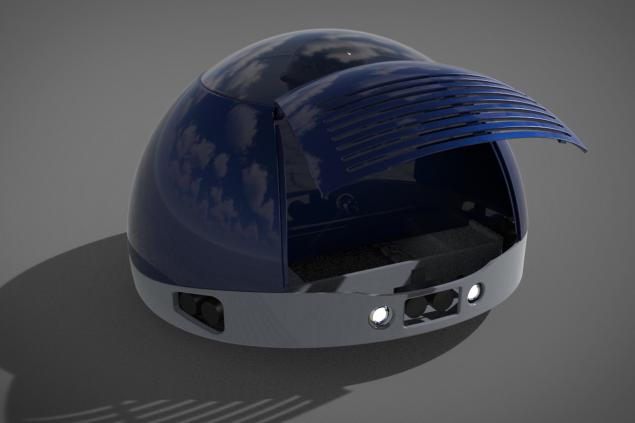
下一步将被添加到相机的立场和板分隔海湾额外的设备。金属元件与厚度0 75毫米,激光切割和弯曲成所需构由不锈钢制成。
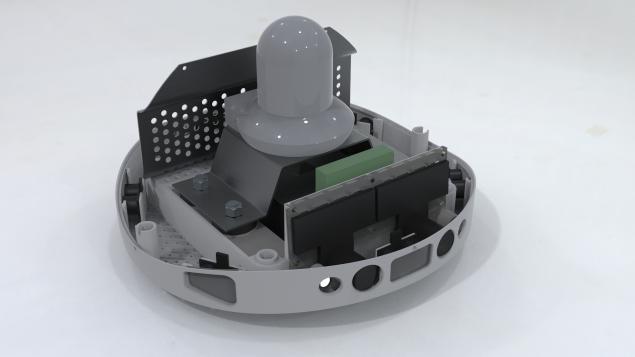
画在广泛的在两个质量和只在前表面可用的颜色。此外,上边缘被涂成黑色无光,以减少眩光。塑料帽被粘合于相机中的槽在外壳的上部。两个组件是由6个主转子和四个额外彼此连接。
因此,在不到两个月,我们已设计从地上爬起来的设计和设计文档完全准备好量产实用,高效的机器人。
从网站工作室FORMA 采取绘画材料。
来源: geektimes.ru/post/248942/