1028
Como hicimos un robot
Queridos amigos! Quiero mostrar un poco de compartir nuestra experiencia en el desarrollo del robot guardaespaldas en el rastreador.
Grandes imágenes bajo el corte.
En materia de seguridad, no debe haber lugares en los que es imposible mirar. Ajuste la cámara en cada esquina no siempre es posible (y no siempre "darse el lujo"), y para evitar "puntos ciegos", aun cuando la cobertura aparentemente completa no siempre es posible. Y el factor humano y no vale la pena mencionar.
Por lo tanto, a patrullar objetos abundan las dificultades del terreno y un montón de posibles puntos ciegos - casas de vacaciones, centros comerciales y de negocios, almacenes - están ofreciendo cada vez más guardias especiales uso de robots
.
Así, equipado con sensores de movimiento, temperatura, humos, etc., así como un robot cámara de vídeo se puede controlar desde el teléfono inteligente, y cuando se activa una alarma - compruebe primero lo que es realmente peligroso sucedido en la instalación, e incluso entonces tomar una decisión -. Si para provocar una respuesta rápida
Tarea para desarrollar vivienda y chasis de montaje para este robot sobre la base de componentes electrónicos disponibles y chasis comprados por gran escala tanque controlado por radio y fue puesto en frente de nosotros - el estudio de diseño industrial FORMA a >. Concepto general y desarrollo de componentes electrónicos involucrados en la empresa X-Turion.

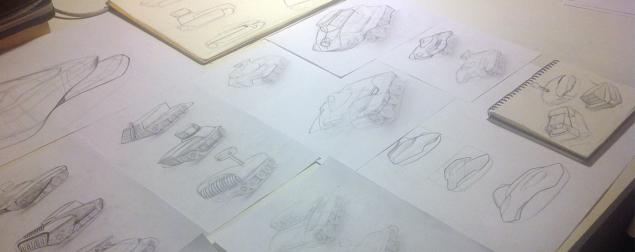
El trabajo comenzó con la recolección de información general sobre Robótica clase similar. Tendencias identificadas estilísticos, materiales seleccionados y técnicas de fabricación, y luego comenzaron búsqueda preliminar. De las propuestas de más de tres docenas de opciones se eligió una dirección - forma amigable y sencilla, la más distante del estilo del tanque, que se convirtió en la base para un mayor desarrollo. El resultado - un aspecto muy simple, la vivienda práctico y discreto oculta de forma segura una sofisticada electrónica y mecánica. Compartimiento para equipo adicional resuelto detrás en el estilo del clásico zadnemotornyh "Fiat". La tapa de la cámara principal es de policarbonato transparente. La forma del robot y utilizado por sus materiales de fabricación debe asegurarse de que los muebles o costosos equipos no será dañado por ellos, y que los niños que tienen que gustar este robot porque recuerda a los personajes favoritos de dibujos animados, ni puede hacer daño sobre usted mismo, o fácilmente "daño" ella.

Dimensiones de la primera forma de realización determina el tamaño proporcionada por el chasis del cliente, desarrollado sobre la base de un modelo tridimensional de la prototipo ya es demasiado largo - 500 mm de diámetro, para crear prototipos que era caro. Por lo tanto, el personal del estudio hizo a sí mismos sobre la base de la bola de la aptitud cuerpo con una resina de poliéster y malla de refuerzo. Tapa transparente se moldeó Plexiglas. Desarrollo de prototipos de recuperación conceptual y la información para el acabado final de la disposición tomó 5 meses. Diseño del chasis se muestra en CeBIT 2014 en Hannover.

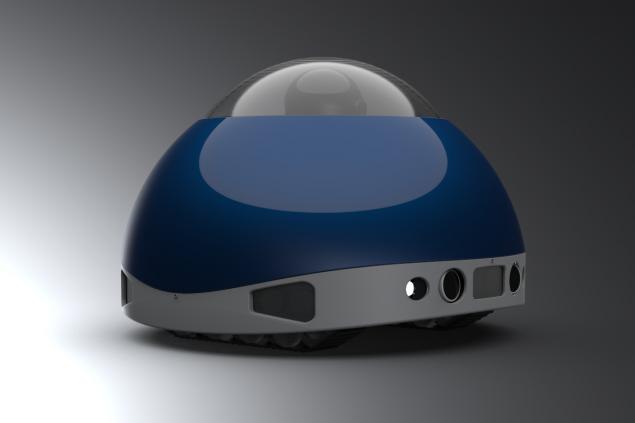
Probando el primer prototipo reveló una serie de deficiencias que han sido eliminados en la continuación de los trabajos. El diámetro del robot disminuyó a 350 mm, ahora es oportuno examinar no sólo los grandes sitios, sino también en casa.
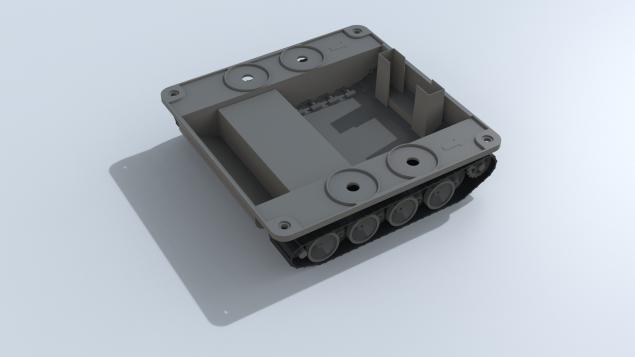
La base del robot se ha establecido un nuevo chasis que actúa como una estructura de soporte de carga, el motor en caso de fijación, la batería, la tarjeta, el módulo inalámbrico. También montado en el chasis de la parte inferior de la carcasa (fabricación de tecnología - moldeo por inyección, está diseñado para formar un molde de dos componentes). En el conjunto resultante se instalarán todos los sensores necesarios y un par estéreo. Espaciadores de goma con dibujos permiten instalar diferentes versiones de la cámara principal.
En realidad, el chasis y la parte inferior del cuerpo:
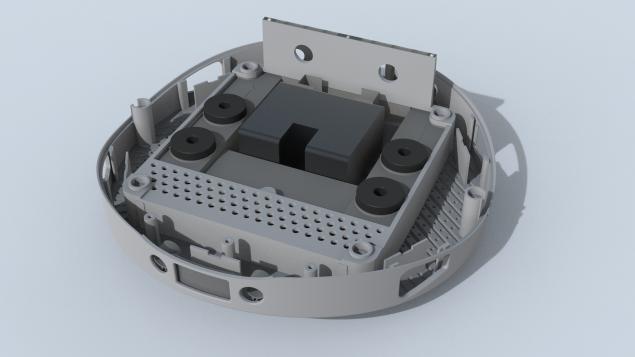
El siguiente paso se añade al soporte de la cámara y la placa que separa la bahía de equipos adicionales. Los elementos metálicos son de acero inoxidable con un espesor de 0, 75 mm, corte láser y doblado en la configuración deseada.
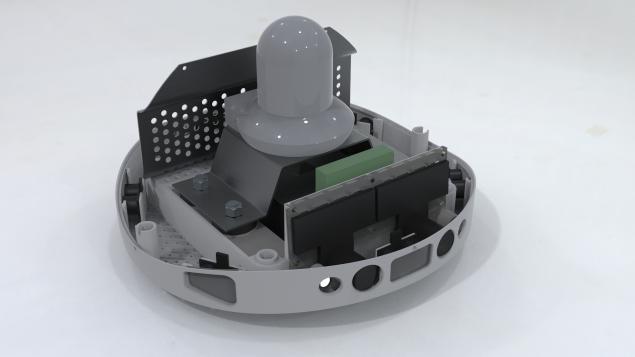
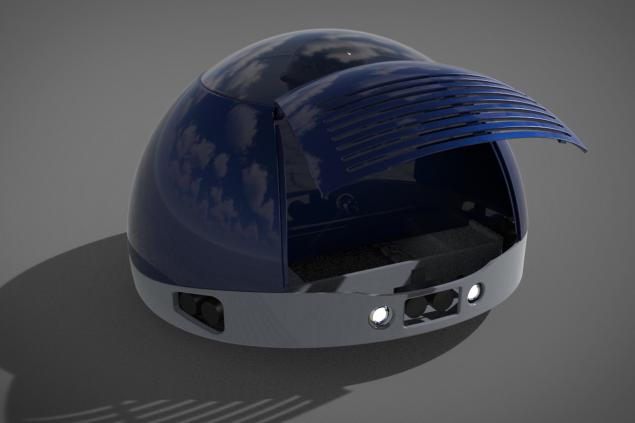
Pintura en una amplia gama de colores disponibles en la masa y sólo la superficie frontal. Además, el borde superior está pintado de negro mate para minimizar el deslumbramiento. La tapa de plástico se pega sobre la cámara en una ranura en la parte superior de la carcasa. Dos conjuntos están unidos entre sí por 6 rotor principal y cuatro adicional.
Así, en menos de un par de meses hemos sido diseñado desde el principio hasta el diseño y la documentación de diseño totalmente listo para la producción en masa de un robot práctico y eficiente.
Material gráfico tomadas del sitio estudio FORMA .
Fuente: geektimes.ru/post/248942/