Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
591
0.1
2015-07-04
Роботы, которые не сталкиваются
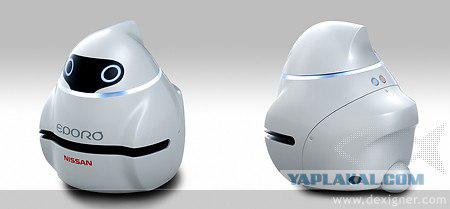
В 2008 году полёт шмеля вдохновил инженеров Nissan на создание концепции Biomimetic Car Robot Drive «BR23C». В 2009 году, наблюдая за поведением рыб, компания разработала робо-авто «EPORO*1». Робот будет двигаться в потоке себе подобных, имитируя поведение рыб в косяках, которые обходят препятствия, не сталкиваясь друг с другом.
via

Вот второе фото:
ЗЫ: тему не ломать — не закончена!
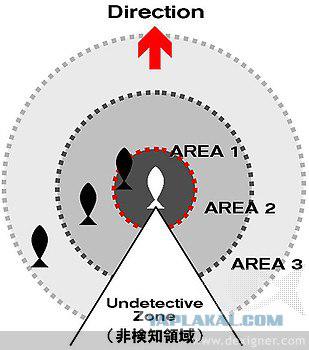
Для ориентации в воде рыба использует так называемую среднюю линию (чувствует происходящее по сторонам с помощью определённой нервной системе). Робот же для этих целей будет использовать лазер. Для зрительного восприятия информации будет использоваться система UWB. Также от рыб робот унаследует три правила поведения в косяке.
В Зоне 1 рыба может спокойно продолжать или менять движение без угрозы столкнуться с другой;
В Зоне 2 она движеться бок о бок с соседом, на которого нужно обращать внимание;
В Зоне 3 приближается к другим рыбам для организации согласованного потока.
ЗЫ: извиняюсь за иероглифы )
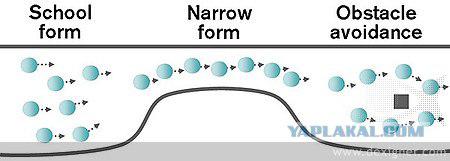
Таким образом схему вариантов движения группой можно изобраизть следующим образом: движение без препятствий, проход узких мест, обхож препятствий.
ЗЫ: тема закончена, можно постить комменты.
(следующий раз укажу количество фот)
Источник: www.yaplakal.com/
via

Вот второе фото:
ЗЫ: тему не ломать — не закончена!

Для ориентации в воде рыба использует так называемую среднюю линию (чувствует происходящее по сторонам с помощью определённой нервной системе). Робот же для этих целей будет использовать лазер. Для зрительного восприятия информации будет использоваться система UWB. Также от рыб робот унаследует три правила поведения в косяке.
В Зоне 1 рыба может спокойно продолжать или менять движение без угрозы столкнуться с другой;
В Зоне 2 она движеться бок о бок с соседом, на которого нужно обращать внимание;
В Зоне 3 приближается к другим рыбам для организации согласованного потока.
ЗЫ: извиняюсь за иероглифы )

Таким образом схему вариантов движения группой можно изобраизть следующим образом: движение без препятствий, проход узких мест, обхож препятствий.
ЗЫ: тема закончена, можно постить комменты.
(следующий раз укажу количество фот)

Источник: www.yaplakal.com/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.