593
机器人不碰撞
2008年,大黄蜂风格的日产工程师的飞行创造仿生机器人车驱动«BR23C»概念。 2009年,观察鱼的行为,该公司自主研发的ROBO-汽车«EPORO * 1“。机器人将在自己的同类的流动移动,模仿鱼在于绕过障碍物而不相互碰撞门柱的行为。
通过

这第二张照片:
PS:不破的话题 - 还没完!
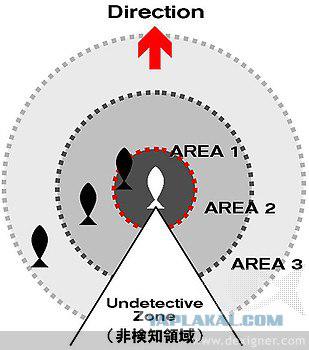
为取向在水中的鱼使用所谓的中间线(感觉是什么目标神经系统发生在两侧)。机器人同样用于此目的是使用激光。为视觉信息系统将用于超宽带。另外从机器鱼将继承在门框行为的三个规则。
在1区,鱼可以安全地继续或改变运动不影响另一面;
在2区是移动邻居,谁需要注意旁边;
3区接近其他鱼类相干流动的组织。
PS:遗憾的字符)
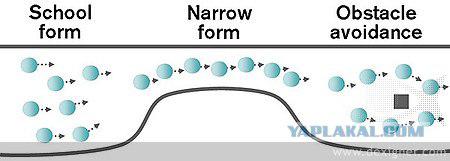
因此,该方案可以是一组运动选项izobraizt如下:运动无阻碍通瓶颈绕过障碍物
PS:这个主题后,您可以发表评论
。 (接下来的时间,指定的光子数)
资料来源:
通过

这第二张照片:
PS:不破的话题 - 还没完!

为取向在水中的鱼使用所谓的中间线(感觉是什么目标神经系统发生在两侧)。机器人同样用于此目的是使用激光。为视觉信息系统将用于超宽带。另外从机器鱼将继承在门框行为的三个规则。
在1区,鱼可以安全地继续或改变运动不影响另一面;
在2区是移动邻居,谁需要注意旁边;
3区接近其他鱼类相干流动的组织。
PS:遗憾的字符)

因此,该方案可以是一组运动选项izobraizt如下:运动无阻碍通瓶颈绕过障碍物
PS:这个主题后,您可以发表评论
。 (接下来的时间,指定的光子数)

资料来源:























