600
Роботи, які не співпадають
У 2008 році польотом джмелі надихнула інженери Nissan для створення концепції Biomimetic Car Robot Drive BR23C. У 2009 році з дотриманням поведінки риб, компанія розробила робот-auto EPORO*1. Робот перейде в потоку власного роду, помікуючи поведінку риби в лопатях, які обходять перешкоди без співвідношення між собою.
Зареєструватися

Ось другий фото:
Не порушуйте тему – це не готово!
 р.
р.
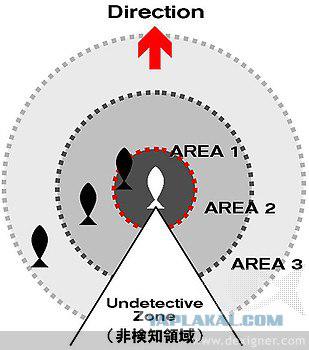
Для орієнтації в воді риба використовує так звану середню лінію (підбори, що відбувається з боків за допомогою певної нервової системи). Роботи будуть використовувати лазер для цього призначення. Система UWB використовується для візуального сприйняття інформації. Також з риби робот успадкує три правила поведінки в суглобі.
У зоні 1 риба може безпечно продовжити або змінити рух без загрози з'єднання з іншим.
У Зоні 2 він переміщається з сусідом.
У зоні 3 підіймається інша риба для організації координованого потоку.
Додатки для персонажів.
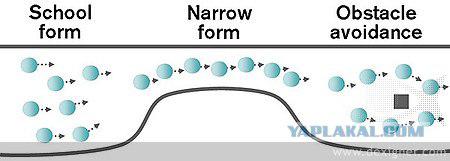
Таким чином, схема варіантів руху групи може бути представлена наступним чином: рух без перешкод, проходження пляшечок, обрізання перешкод.
Тема завершена, ви можете розмістити коментарі.
(Наступна кількість фото)
Джерело:
Зареєструватися

Ось другий фото:
Не порушуйте тему – це не готово!
 р.
р.Для орієнтації в воді риба використовує так звану середню лінію (підбори, що відбувається з боків за допомогою певної нервової системи). Роботи будуть використовувати лазер для цього призначення. Система UWB використовується для візуального сприйняття інформації. Також з риби робот успадкує три правила поведінки в суглобі.
У зоні 1 риба може безпечно продовжити або змінити рух без загрози з'єднання з іншим.
У Зоні 2 він переміщається з сусідом.
У зоні 3 підіймається інша риба для організації координованого потоку.
Додатки для персонажів.

Таким чином, схема варіантів руху групи може бути представлена наступним чином: рух без перешкод, проходження пляшечок, обрізання перешкод.
Тема завершена, ви можете розмістити коментарі.
(Наступна кількість фото)

Джерело:























