2969
Tin м'язовий підсилювач
Я хочу розповісти про свою ідею і як я спробував це зробити. Пристрій є підсилювачем м'язів телят (гомілковостоп), який працює за принципом накопичення енергії навесні. У статті я спробував описати весь шлях, який пройшов. Я також хочу сказати, що це мій перший досвід в галузі реального будівництва, а також мій проект дисертації.
Коли я був студентом Московського державного технічного університету Бауман, я займався акробатики, і в цілому я любив складні координаційні види спорту (і все ще люблять їх). Навколо 2007, я знайшов пристрій онлайн, який допомагає людині стрибати високий і запустити високий. Це називається JollyJumper. По суті, вона була пружиною жорстко прикріплюється до щиколотки людини. У цьому випадку щиколотка (стоп відносно нижньої ніжки і нижньої нижньої ніжки) жорстко фіксується.
Цей варіант дизайну можна назвати аналогом трамваю. Користувач не може контролювати свої стрибки з переміщенням щиколотки, так як відбувається при стрибках на гімнастичному килимі або акробатичні доріжки.
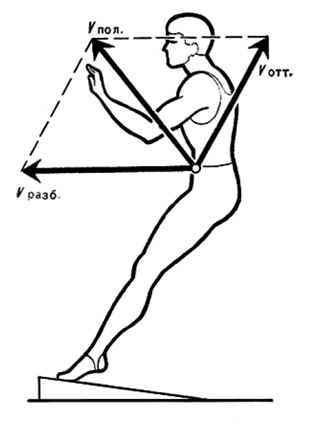
Про розміри, вага і використання для ходьби і бігу, я не буду говорити багато, але вони також не особливо видатні. Наприклад, при ходьбі або бігу спочатку ви доторкнетеся до джерел проти одного.
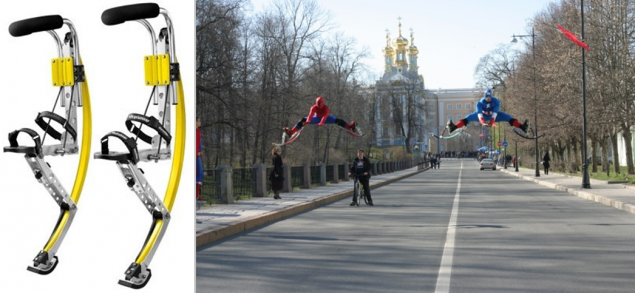
У мене була ідея: якщо є аналог трамваю, то можливо, є аналог акробатичної доріжки? Я почав Google і знайшов деякі стрибки пристроїв:
1) TRAMP-It-Jump-Shoes (у 2007 році вони були тільки за кордоном):

2) Канго стрибків (у 2007 році вони були тільки за кордоном):

(3) Оскар Пісторій

Але всі ці пристрої не дозволяють щиколотки пересуватися.
Пізніше я зробив черговий пошук патенту. Я знайшов багато цікавих речей, але більше про це пізніше. Я хочу описати процес, як це було.
Розробка прототипів Це мій навчальний журнал (CRIRS). Я пропоную мені нагляд і він затвердив, для чого я дуже вдячний! З моменту свого управління приладобудування та технології – та теми повинні бути доречними. Але я повернувся до розробки технології виготовлення цього дизайну і, відповідно, обчислення режимів обробки.
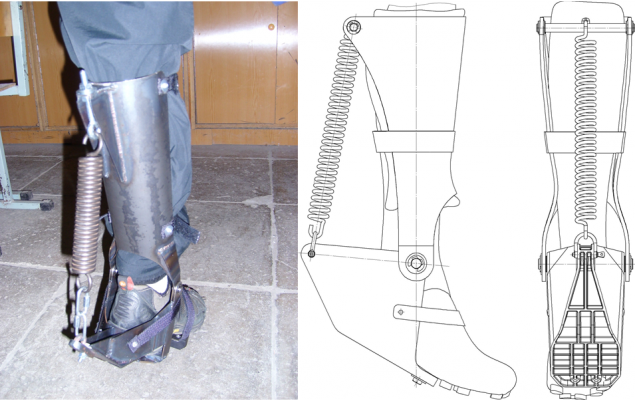
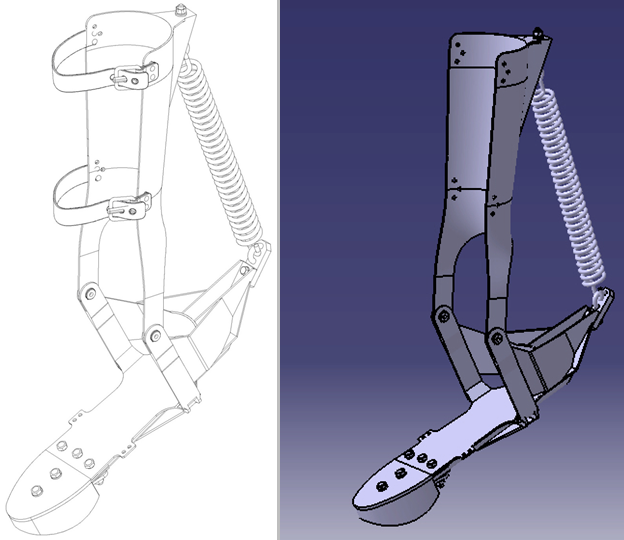
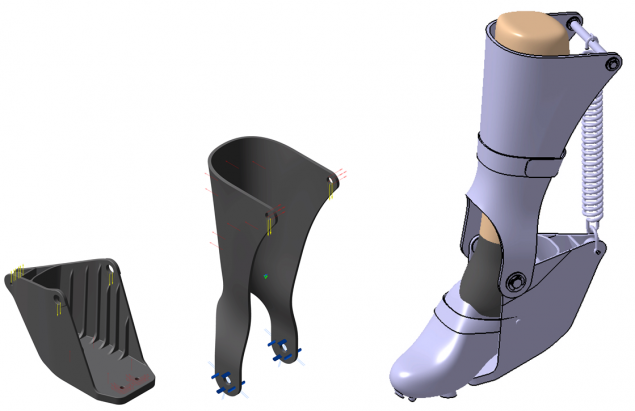
Пристрій я розвинувся складається з стопи (червоний), ікра-фіксатора (зелений), колодки (чорний), і пружини (синій). Нога (синій) прикріплюється до пристрою за допомогою стрічок (сірий). Між гомілкою і ікра-фіксатором бажано розмістити шматочок повстяної так, щоб фіксатор не руйнував ногу.
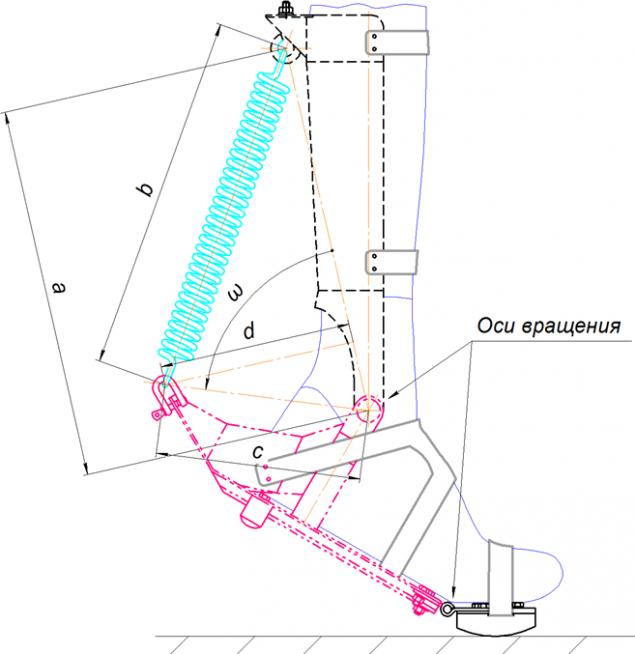
Нога може обертати відносно ікра-фіксатора. Ось обертання показана на малюнку, вона поєднується з віссю обертання стопи відносно нижньої ноги (гомілковостопка).
У неускладненому положенні пружина знаходиться в стисненому стані. Моя нога витягується. Коли нога простягається «на себе», пружина простягається і створює силу, яка прагне витягти стопу.
Чорний колір вільно обертається (прокидається на себе і від себе). Так ви можете стояти ще і ходити. Однак можна зробити пристрій з жорсткою, не обертаючим дном. Цей дизайн буде менш зручний при ходьбі і стоячи, але може перенести більше сил, використовуючи більший робочий хід весни.
Пристрій не замінює сили, створену м'язами агоністів великогомілкової кістки, а саме збільшує її, дає збільшення міцності на неї. У той же час маневреність рухів залишиться практично повністю.
Схема роботи:
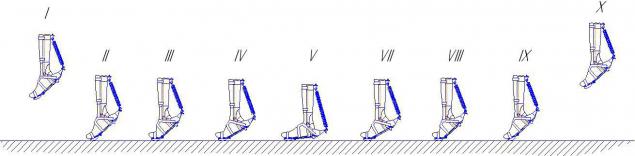
I - момент польоту (спадок). Людина стрибає з висоти або з попереднього стрибка.
II-III - момент дотику. Сік працює. З розтягованої позиції вона йде горизонтально.
III-V - Розтягування весни. У цей період зусилля з весни додається до міцності м'язів телят. Також на даному етапі відбувається загартування низької сили (визначення). сила з весни бере на себе деякі навантаження. В положенні В, пружина простягається якомога більше.
V-VIII - Стиснення весни. Договір м'язів кальмарів і дати міцність стрибати. До цієї сили додається сила від стиснення пружини. Тому сила відштовхування посилюється.
VIII-IX - Оздоблення носком. У цій точці є остаточний штовхання через відтягування носка. Цей поштовх визначає напрямок польоту стопи (у поєднанні з роботою рук, викривленням тіла і роботою м'язів стегна). Також підтягнуті шкарпетки є наслідком належної роботи при відставці під час стрибка.
По-перше, він розвивав зовнішній вигляд. Тобто, приблизно описана кінематична схема. Використовується MathCad для розрахунку оптимальної геометрії та жорсткості пружини. Це геометрія, яка дасть максимальну ефективність від використання.
Щоб визначити момент, було складено рівняння моменту відносно точки обертання стопи відносно нижньої ноги:
M=d∙F, де є плеч, F=k∙x сила, утворена пружиною.
к - жорсткість весни, х - розтягування весни.
Далі необхідно було отримати залежність моменту М від кута обертання ω.
В залежності від довжини плеча на кут повороту:

Залежність розтягування пружини на кут повороту:

де Х – довжина весни в неускладненому стані.
Загальні рівняння моменту в залежності від кута обертання:

Наступним є граф залежності моменту на куті обертання (в ради):
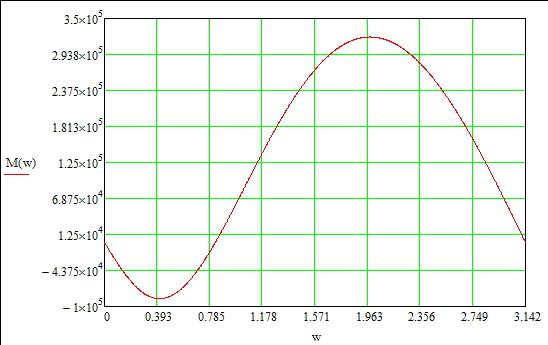
З цього графіка я знайшов, що найбільш оптимальне використання конструкції під кутом повороту від 60 до 100.
Розроблено прототип за допомогою системи CATIA V5 R19. Розраховано міцні характеристики його частин. Матеріал деталей кузова сталевий 3. Товщина листа, з якого були зроблені ці частини, 2 мм.
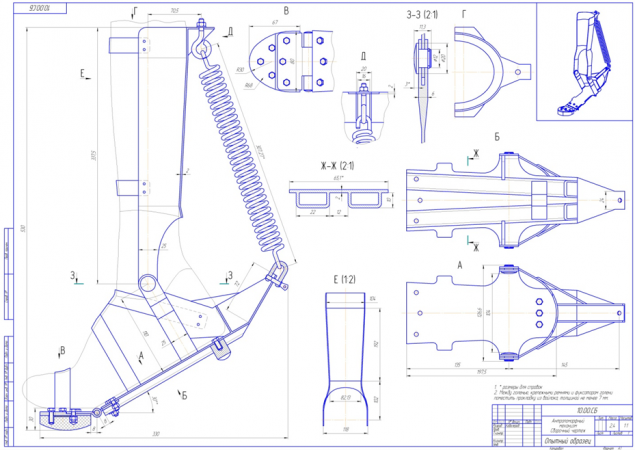
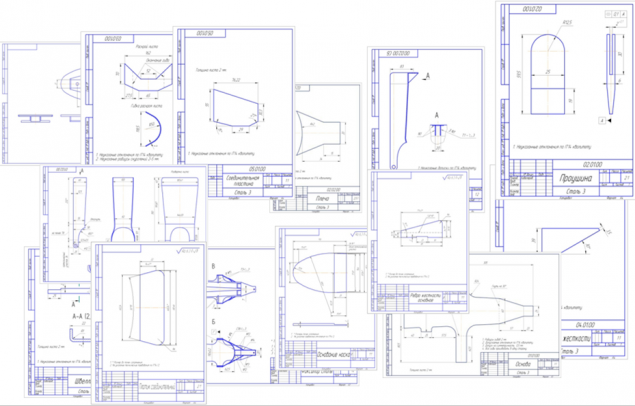
З Я був бідним студентом, я не маю багато грошей. Майже всі операції повинні виконуватися професіоналами. І для того, щоб Дядько Вася зробити те, що я хочу прямо в перший раз, необхідно описати деталі так, щоб він був чітким і їжаком. Я зробив креслення всіх деталей, складання деталей з усіма припусками і так далі. В результаті я вперше відкрив лист на заводі, де я практикую. Відкриття аркуша відбувалось на електроерозійній машині (варі) Fanuc. Я. Я, ймовірно, не знаю, як зробити процес ще більш дорогим. У будь-якому випадку це дуже дешево для мене, через знайомство. Хоча Babina дроти використовуються нові (!!!), так як машина призначена таким чином, що відпрацьовані розриви дроту. Це зроблено для того, щоб зробити його неможливим, щоб використовувати дріт знову, а також зробити його легше розпоряджатися ним і благ бала бла. Звісно, можна вимкнути, але після того, як гарантія летить на машині. Ця машина була використана для дуже точної роботи, стоялася в спеціальному термостійкому приміщенні. Також на заводі я був різьблений і загартований осей.
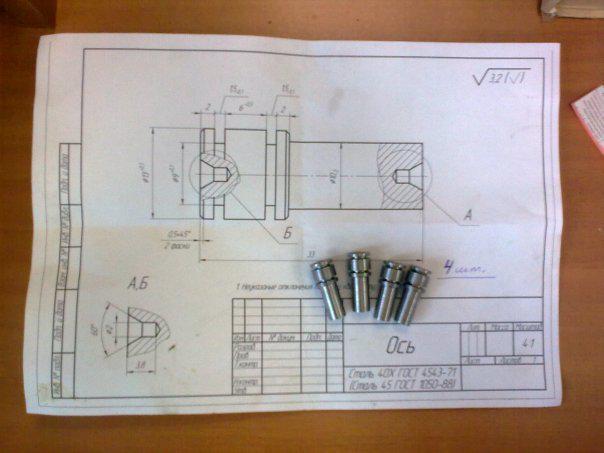
Я був введений до в'язниці в інституті. Я зробив гнучкість себе. Процес зварювання приймав близько 3 днів. Вирощування і свердління отворів, обмотки ремінців і бурових отворів я зробив себе в м'якоть. При цьому діаметр осі був обраний на основі наявності відповідного інструменту. Тобто спочатку я знайшов правильні інструменти (дриль-ценкер-сканер), а потім створив малюнок осі (див. Рис. вище). Я замовив навесні в Інституті досліджень ім. Лянозова. Я просто здивував, що два джерела на мої креслення вартість мене тільки 250 рублів! І я був навіть надані перевірки, які фактично підтвердили відповідність виробу і креслення.



Тести
Після будівництва були виявлені кілька помилок:
- пружина була дуже жорсткою (2000 н);
- вісь петлі далі (відносна до п'яти) ніж вісь щиколотки близько 10-15 мм;
Довжина стопи не достатня для ніг, щоб повністю підійти. Товсті стопи повісять з стопи (близько 15 мм), що створює дискомфорт;
Не ергономічна геометрія буфера гуми. Необхідно зробити більш округлі форми і більший радіус викривлення;
У зоні А спостерігається концентрація сили (реакція) на гомілці.
В цілому прототип показав, що дизайн працює. Вага конструкції (на нозі) 3 кг.

На першому моделювалися середні людські ніжки і велосипедний контактний завантажувач. Контакте взуття має дуже жорсткі підошви композитного матеріалу. Жорстка підошва - носій сили з носка на пружину через фіксатор стопи. Для більш точного моделювання я вирішив зробити 3D модель ноги. Я фотографував стопу в двох проекціях і створив 3D модель на основі цих проекцій (ідентично цей підхід часто використовується в Китаї, щоб швидко створити 3D копії продуктів і подальшого виробництва).

Багато опцій були розроблені, одна з них була опція з регулярним хакером.
Далі, за моделлю зносу і ніг були створені дві основні деталі: фіксатор стопи і ікра-фіксатор. Створено чистий технічний 3D модель всього дизайну, так як було недостатньо часу.
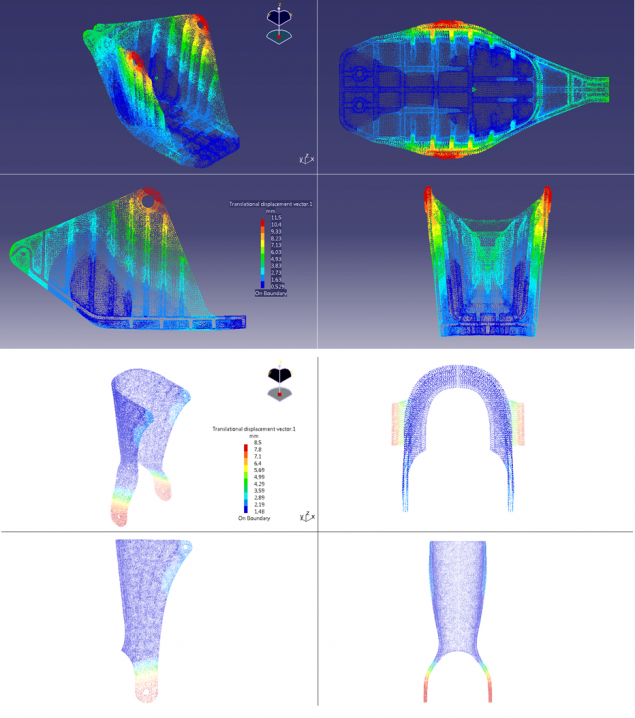
Матеріал конструкції був присвоєний полікарбонат PC-LSV-30, так як він задовільняє міцність і характеристики опалубки і лиття.
Прості розрахунки по міцності конструкції. Мета полягає в тому, щоб з'ясувати рухи підніжжя «поїзда» в навісних місцях. Розрахунок показали задовільні результати. Для еквівалентних напруг теж був запас.
 р.
р.
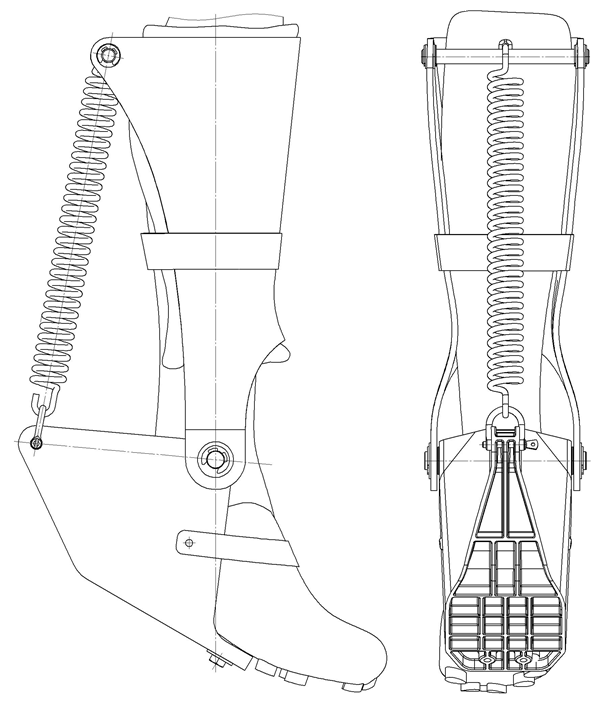
Красива модель (з кріпленнями і внутрішньою підкладкою) загальної збірки не встигла зробити, тому тут я дам малюнок загального вигляду мого дизайну на нозі людини.
З того часу я навчався на кафедрі приладобудування та технології, основна частина диплома була в технології виготовлення мого дизайну.
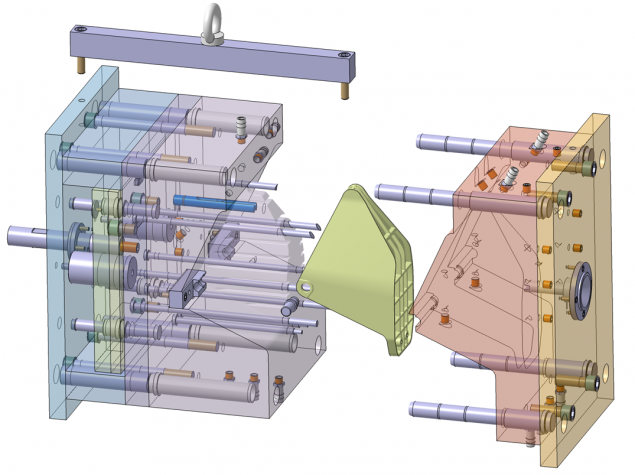
Я шукав багато варіантів виготовлення і багато форм: силіконові, метелики і т.д. В кінці він оселився на класичній версії. У модулі CATIA Moulding Design розробила прес-форму для виготовлення стібків. Форма була створена з стандартних компонентів Hasco (звідси CATIA мала їх бібліотеку, а її компоненти були занадто мережними для створення, і не було часу). При проектуванні системи охолодження необхідно використовувати певні частини (як Fodesco) для необхідного розподілу потоку охолодження / теплої рідини. Знижувати вартість виробництва (циркуляція дрібних 1000 штук в місяць), прикмети для формування отворів були зроблені рахунок-фактури з ручним поглибленням. Тепер я зрозумів, що можна додати вбудовані елементи до дизайну в зоні осі, але я не робив цього на дипломі.
До речі, моя форма була розглянута дизайнерами форм, які сказали, що вона була створена правильно і технологічно, тобто вона може бути виконана навіть тоді. Вартість виготовлення форми становить близько 7000 євро (2010).
Далі створено технологічний процес виготовлення матриці. Це, вибір інструментів, методів обробки, вибору обладнання, машин і т.д. Я не збираюся дати вам операційний ескіз, тому що я не думаю, що це призведе до інтересу.
У висновку результат роботи показав, що дизайн працює. У той час я мало грошей, тому я не міг перевести свою ідею в реальність.
Проект досліджував велику кількість варіантів і провів патентний пошук, який дав цікаві результати, а також запровадив мене до німецького лікаря Герд Юнгкунц. І я випадково знайшов свою електронну пошту в Інтернеті і поговорив йому трохи про його моделі. Виявилося, що він створив майже той самий дизайн і навіть якось тестував його (він був тільки гараж і інструменти рівня болгарки, він ще лікар медицини). Однак робота не ходила далі і покинув справу. Я тепер втратив свої контакти і мій останній пошук був безплідним. Чи може хтось допомогти? й
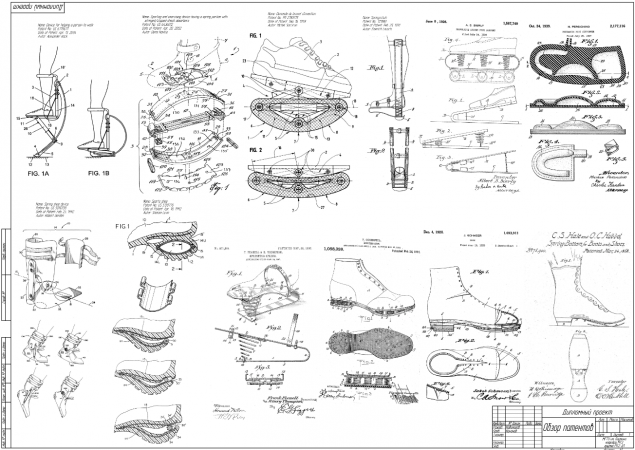
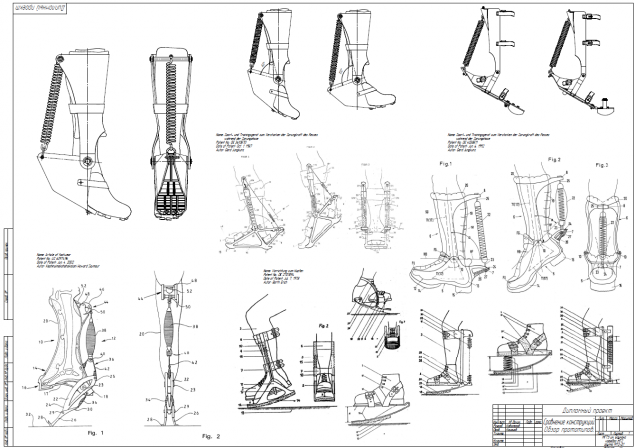
Нижче наведено список цікавих патентів на предмет:
 р.
р.
Я тепер розглядаю варіанти з більш продуктивними еластичними матеріалами як навесні, так і можливістю зробити дизайн більш ергономічним.
Якщо хтось зацікавлений у роботі, я готовий до співпраці, а також в цілому, тема екзоскелеонів і різних видів підсилювачів людської потужності цікава мені.
Джерело: geektimes.ru/post/242596/

Коли я був студентом Московського державного технічного університету Бауман, я займався акробатики, і в цілому я любив складні координаційні види спорту (і все ще люблять їх). Навколо 2007, я знайшов пристрій онлайн, який допомагає людині стрибати високий і запустити високий. Це називається JollyJumper. По суті, вона була пружиною жорстко прикріплюється до щиколотки людини. У цьому випадку щиколотка (стоп відносно нижньої ніжки і нижньої нижньої ніжки) жорстко фіксується.

Цей варіант дизайну можна назвати аналогом трамваю. Користувач не може контролювати свої стрибки з переміщенням щиколотки, так як відбувається при стрибках на гімнастичному килимі або акробатичні доріжки.

Про розміри, вага і використання для ходьби і бігу, я не буду говорити багато, але вони також не особливо видатні. Наприклад, при ходьбі або бігу спочатку ви доторкнетеся до джерел проти одного.
У мене була ідея: якщо є аналог трамваю, то можливо, є аналог акробатичної доріжки? Я почав Google і знайшов деякі стрибки пристроїв:
1) TRAMP-It-Jump-Shoes (у 2007 році вони були тільки за кордоном):

2) Канго стрибків (у 2007 році вони були тільки за кордоном):

(3) Оскар Пісторій

Але всі ці пристрої не дозволяють щиколотки пересуватися.
Пізніше я зробив черговий пошук патенту. Я знайшов багато цікавих речей, але більше про це пізніше. Я хочу описати процес, як це було.
Розробка прототипів Це мій навчальний журнал (CRIRS). Я пропоную мені нагляд і він затвердив, для чого я дуже вдячний! З моменту свого управління приладобудування та технології – та теми повинні бути доречними. Але я повернувся до розробки технології виготовлення цього дизайну і, відповідно, обчислення режимів обробки.
Пристрій я розвинувся складається з стопи (червоний), ікра-фіксатора (зелений), колодки (чорний), і пружини (синій). Нога (синій) прикріплюється до пристрою за допомогою стрічок (сірий). Між гомілкою і ікра-фіксатором бажано розмістити шматочок повстяної так, щоб фіксатор не руйнував ногу.

Нога може обертати відносно ікра-фіксатора. Ось обертання показана на малюнку, вона поєднується з віссю обертання стопи відносно нижньої ноги (гомілковостопка).
У неускладненому положенні пружина знаходиться в стисненому стані. Моя нога витягується. Коли нога простягається «на себе», пружина простягається і створює силу, яка прагне витягти стопу.
Чорний колір вільно обертається (прокидається на себе і від себе). Так ви можете стояти ще і ходити. Однак можна зробити пристрій з жорсткою, не обертаючим дном. Цей дизайн буде менш зручний при ходьбі і стоячи, але може перенести більше сил, використовуючи більший робочий хід весни.
Пристрій не замінює сили, створену м'язами агоністів великогомілкової кістки, а саме збільшує її, дає збільшення міцності на неї. У той же час маневреність рухів залишиться практично повністю.
Схема роботи:

I - момент польоту (спадок). Людина стрибає з висоти або з попереднього стрибка.
II-III - момент дотику. Сік працює. З розтягованої позиції вона йде горизонтально.
III-V - Розтягування весни. У цей період зусилля з весни додається до міцності м'язів телят. Також на даному етапі відбувається загартування низької сили (визначення). сила з весни бере на себе деякі навантаження. В положенні В, пружина простягається якомога більше.
V-VIII - Стиснення весни. Договір м'язів кальмарів і дати міцність стрибати. До цієї сили додається сила від стиснення пружини. Тому сила відштовхування посилюється.
VIII-IX - Оздоблення носком. У цій точці є остаточний штовхання через відтягування носка. Цей поштовх визначає напрямок польоту стопи (у поєднанні з роботою рук, викривленням тіла і роботою м'язів стегна). Також підтягнуті шкарпетки є наслідком належної роботи при відставці під час стрибка.
По-перше, він розвивав зовнішній вигляд. Тобто, приблизно описана кінематична схема. Використовується MathCad для розрахунку оптимальної геометрії та жорсткості пружини. Це геометрія, яка дасть максимальну ефективність від використання.
Щоб визначити момент, було складено рівняння моменту відносно точки обертання стопи відносно нижньої ноги:
M=d∙F, де є плеч, F=k∙x сила, утворена пружиною.
к - жорсткість весни, х - розтягування весни.
Далі необхідно було отримати залежність моменту М від кута обертання ω.
В залежності від довжини плеча на кут повороту:

Залежність розтягування пружини на кут повороту:

де Х – довжина весни в неускладненому стані.
Загальні рівняння моменту в залежності від кута обертання:

Наступним є граф залежності моменту на куті обертання (в ради):

З цього графіка я знайшов, що найбільш оптимальне використання конструкції під кутом повороту від 60 до 100.
Розроблено прототип за допомогою системи CATIA V5 R19. Розраховано міцні характеристики його частин. Матеріал деталей кузова сталевий 3. Товщина листа, з якого були зроблені ці частини, 2 мм.



З Я був бідним студентом, я не маю багато грошей. Майже всі операції повинні виконуватися професіоналами. І для того, щоб Дядько Вася зробити те, що я хочу прямо в перший раз, необхідно описати деталі так, щоб він був чітким і їжаком. Я зробив креслення всіх деталей, складання деталей з усіма припусками і так далі. В результаті я вперше відкрив лист на заводі, де я практикую. Відкриття аркуша відбувалось на електроерозійній машині (варі) Fanuc. Я. Я, ймовірно, не знаю, як зробити процес ще більш дорогим. У будь-якому випадку це дуже дешево для мене, через знайомство. Хоча Babina дроти використовуються нові (!!!), так як машина призначена таким чином, що відпрацьовані розриви дроту. Це зроблено для того, щоб зробити його неможливим, щоб використовувати дріт знову, а також зробити його легше розпоряджатися ним і благ бала бла. Звісно, можна вимкнути, але після того, як гарантія летить на машині. Ця машина була використана для дуже точної роботи, стоялася в спеціальному термостійкому приміщенні. Також на заводі я був різьблений і загартований осей.

Я був введений до в'язниці в інституті. Я зробив гнучкість себе. Процес зварювання приймав близько 3 днів. Вирощування і свердління отворів, обмотки ремінців і бурових отворів я зробив себе в м'якоть. При цьому діаметр осі був обраний на основі наявності відповідного інструменту. Тобто спочатку я знайшов правильні інструменти (дриль-ценкер-сканер), а потім створив малюнок осі (див. Рис. вище). Я замовив навесні в Інституті досліджень ім. Лянозова. Я просто здивував, що два джерела на мої креслення вартість мене тільки 250 рублів! І я був навіть надані перевірки, які фактично підтвердили відповідність виробу і креслення.



Тести

Після будівництва були виявлені кілька помилок:
- пружина була дуже жорсткою (2000 н);
- вісь петлі далі (відносна до п'яти) ніж вісь щиколотки близько 10-15 мм;
Довжина стопи не достатня для ніг, щоб повністю підійти. Товсті стопи повісять з стопи (близько 15 мм), що створює дискомфорт;
Не ергономічна геометрія буфера гуми. Необхідно зробити більш округлі форми і більший радіус викривлення;
У зоні А спостерігається концентрація сили (реакція) на гомілці.
В цілому прототип показав, що дизайн працює. Вага конструкції (на нозі) 3 кг.

На першому моделювалися середні людські ніжки і велосипедний контактний завантажувач. Контакте взуття має дуже жорсткі підошви композитного матеріалу. Жорстка підошва - носій сили з носка на пружину через фіксатор стопи. Для більш точного моделювання я вирішив зробити 3D модель ноги. Я фотографував стопу в двох проекціях і створив 3D модель на основі цих проекцій (ідентично цей підхід часто використовується в Китаї, щоб швидко створити 3D копії продуктів і подальшого виробництва).

Багато опцій були розроблені, одна з них була опція з регулярним хакером.
Далі, за моделлю зносу і ніг були створені дві основні деталі: фіксатор стопи і ікра-фіксатор. Створено чистий технічний 3D модель всього дизайну, так як було недостатньо часу.

Матеріал конструкції був присвоєний полікарбонат PC-LSV-30, так як він задовільняє міцність і характеристики опалубки і лиття.
Прості розрахунки по міцності конструкції. Мета полягає в тому, щоб з'ясувати рухи підніжжя «поїзда» в навісних місцях. Розрахунок показали задовільні результати. Для еквівалентних напруг теж був запас.
 р.
р.Красива модель (з кріпленнями і внутрішньою підкладкою) загальної збірки не встигла зробити, тому тут я дам малюнок загального вигляду мого дизайну на нозі людини.

З того часу я навчався на кафедрі приладобудування та технології, основна частина диплома була в технології виготовлення мого дизайну.
Я шукав багато варіантів виготовлення і багато форм: силіконові, метелики і т.д. В кінці він оселився на класичній версії. У модулі CATIA Moulding Design розробила прес-форму для виготовлення стібків. Форма була створена з стандартних компонентів Hasco (звідси CATIA мала їх бібліотеку, а її компоненти були занадто мережними для створення, і не було часу). При проектуванні системи охолодження необхідно використовувати певні частини (як Fodesco) для необхідного розподілу потоку охолодження / теплої рідини. Знижувати вартість виробництва (циркуляція дрібних 1000 штук в місяць), прикмети для формування отворів були зроблені рахунок-фактури з ручним поглибленням. Тепер я зрозумів, що можна додати вбудовані елементи до дизайну в зоні осі, але я не робив цього на дипломі.
До речі, моя форма була розглянута дизайнерами форм, які сказали, що вона була створена правильно і технологічно, тобто вона може бути виконана навіть тоді. Вартість виготовлення форми становить близько 7000 євро (2010).

Далі створено технологічний процес виготовлення матриці. Це, вибір інструментів, методів обробки, вибору обладнання, машин і т.д. Я не збираюся дати вам операційний ескіз, тому що я не думаю, що це призведе до інтересу.
У висновку результат роботи показав, що дизайн працює. У той час я мало грошей, тому я не міг перевести свою ідею в реальність.
Проект досліджував велику кількість варіантів і провів патентний пошук, який дав цікаві результати, а також запровадив мене до німецького лікаря Герд Юнгкунц. І я випадково знайшов свою електронну пошту в Інтернеті і поговорив йому трохи про його моделі. Виявилося, що він створив майже той самий дизайн і навіть якось тестував його (він був тільки гараж і інструменти рівня болгарки, він ще лікар медицини). Однак робота не ходила далі і покинув справу. Я тепер втратив свої контакти і мій останній пошук був безплідним. Чи може хтось допомогти? й
Нижче наведено список цікавих патентів на предмет:

 р.
р.Я тепер розглядаю варіанти з більш продуктивними еластичними матеріалами як навесні, так і можливістю зробити дизайн більш ергономічним.
Якщо хтось зацікавлений у роботі, я готовий до співпраці, а також в цілому, тема екзоскелеонів і різних видів підсилювачів людської потужності цікава мені.
Джерело: geektimes.ru/post/242596/