2963
放大器腿部肌肉
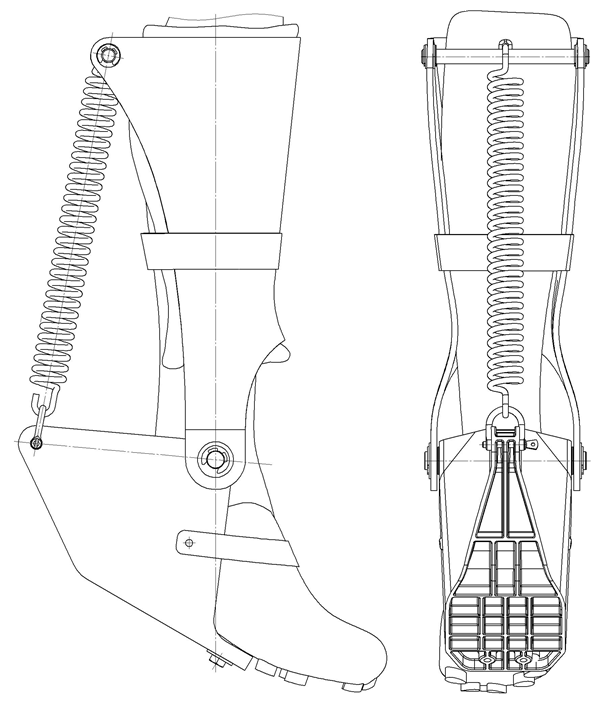
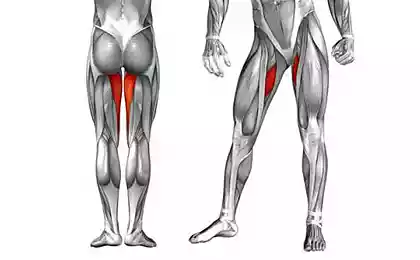
我想告诉你我的想法,我怎么想它付诸实践。该装置是腿部肌肉(脚踝),谁的作品在弹簧储能的原理的一个放大器。在本文中,我试图解释所有的方式,其中发生。我还想说,这是在处理实际施工我第一次的经验,这是我的毕业设计。
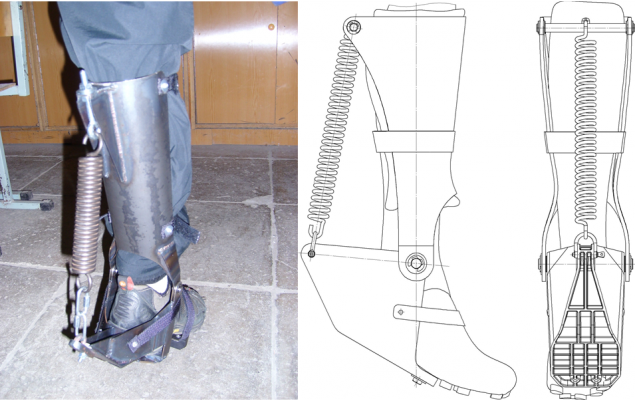
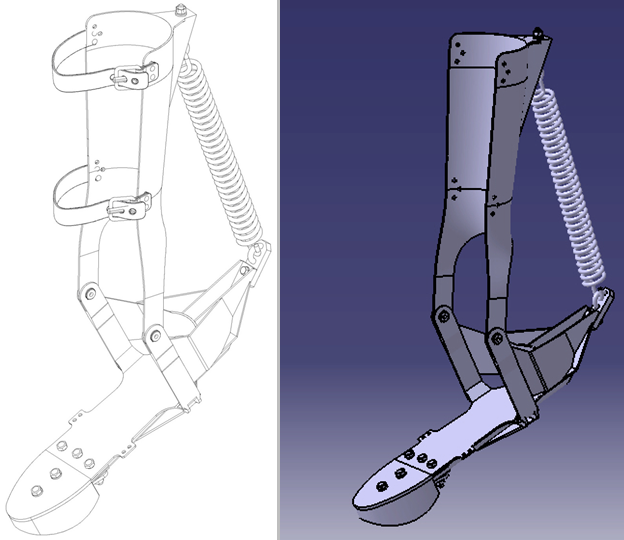
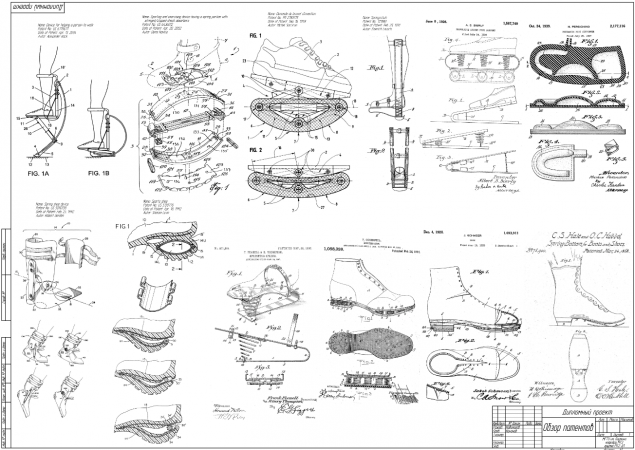
创意 H4>当我还是一个学生MSTU。鲍曼,杂技,一般喜欢困难的协调运动(仍然爱)。 2007年左右,我发现互联网的设备,可以帮助一个人跳的高和运行。它的名字 JollyJumper 。事实上,它由一个弹簧刚性地连接到脚踝的人。在这种情况下,(相对于胫骨和跖骨脚)的脚踝被牢固地固定。
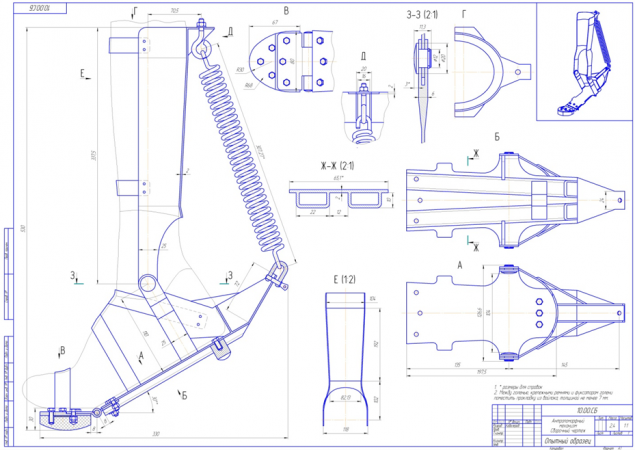
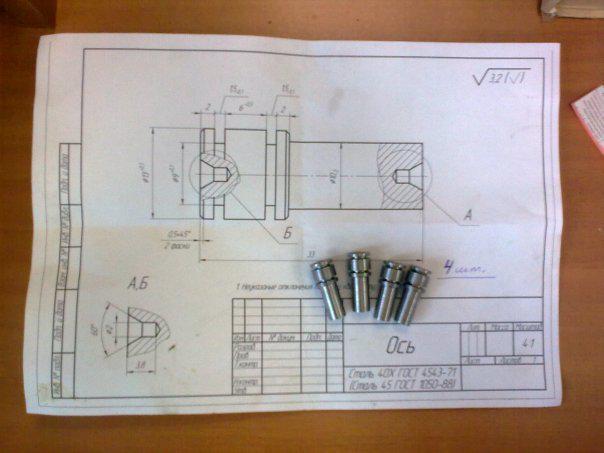
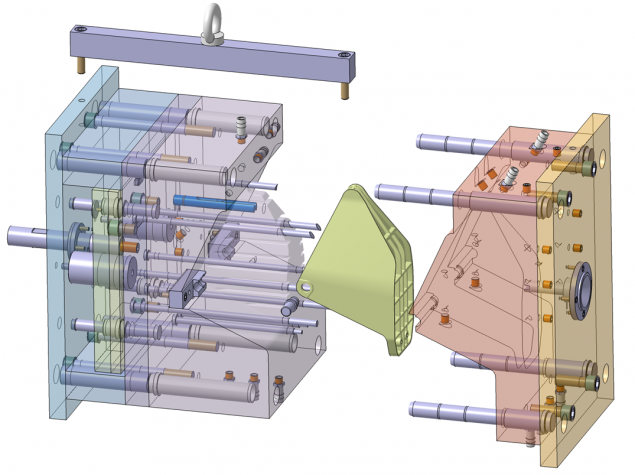
原型开发 H4>这是我科学研究(KNIRS)当然。我提供给他的上司,他批准,为此他非常感谢!由于我的器乐技巧和技术部 - 然后主题必须是相关的。但我扭了开发这种设计的制造技术,因此,预计处理模式。
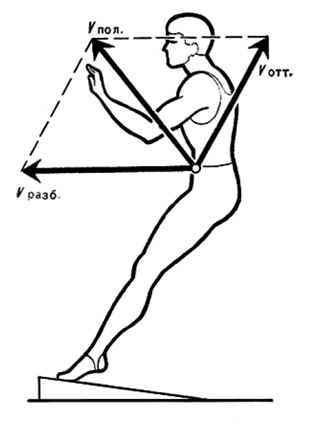
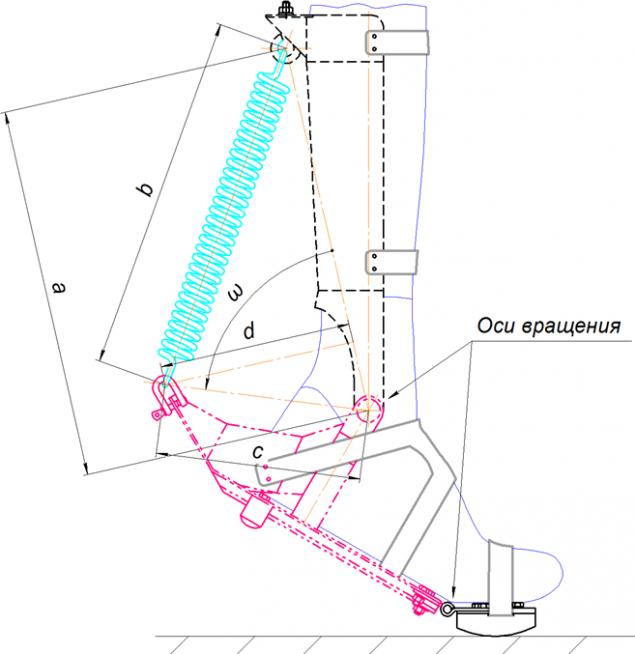
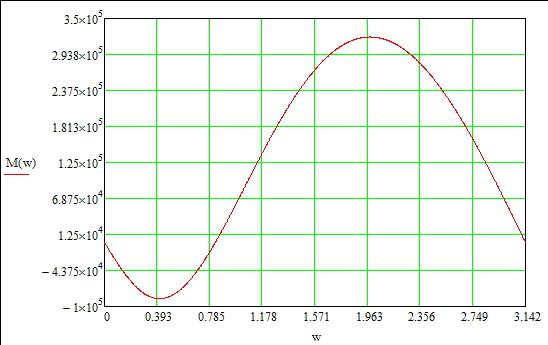
选择主要尺寸 H4>第一步是设计外观。由该运动系统大致说明。趁着MathCad'om用于计算该弹簧的最佳形状和刚度。也就是说,这样的几何形状将得到最大的使用效率。
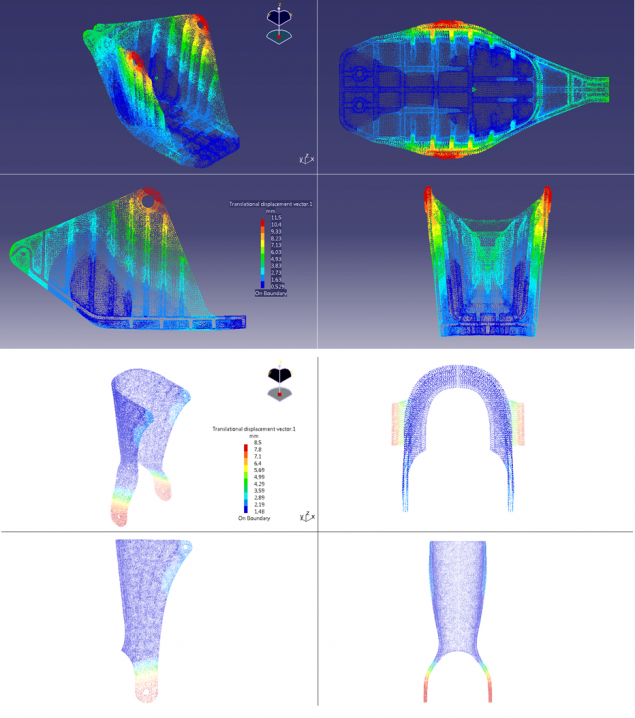
测试 H4>
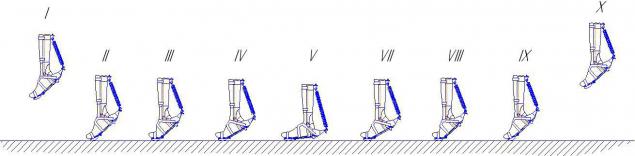
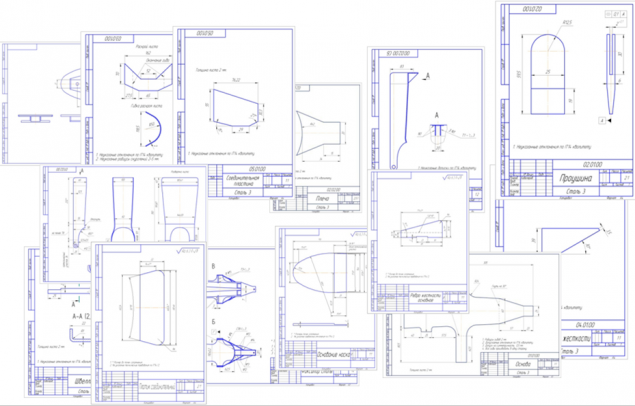
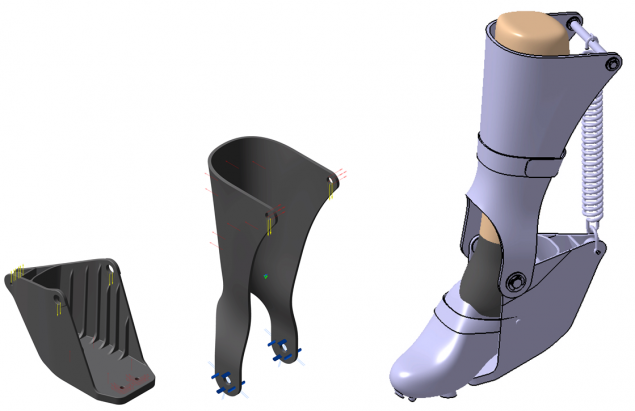
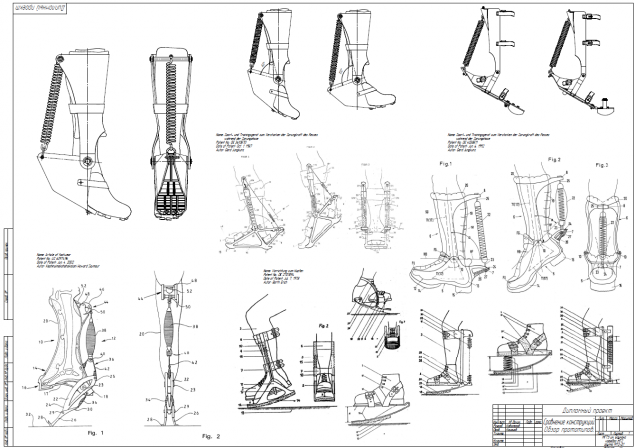
会计不足和塑料制成的结构造型 H4>最初模仿人体足部中型和骑自行车的履带板公司。接触靴具有由复合材料制成的一个非常硬鞋底。僵硬的鞋底是一个航空母舰部队的行动从鼻子到春天通过脚踏板。为了更精确的模拟,我决定让你的脚的3D模型。我在两个突出拍到一只脚,并创造了这些预测的基础上,3D模型(顺便说一句,这种方式往往是在中国用于快速创建产品的3D副本和后续生产)。
总之 H4>这项工作的结果表明,该结构是有效的。当时,这笔钱我小的时候,所以要实现他的想法变成现实不能。