623
Система керування електронним підвісом
Шановна громада, я представлю вашій увазі доповідь про роботу, виконану для перехрестя моїх двох хобі: гірський велосипед і мікроелектроніка.
Так, в цій статті ми будемо говорити про внутрішній розвиток електронної системи управління підвіскою гірського велосипеда. Я не турбувати з тривалим введенням, просто до фотографій та відео:
12 зображень + опис + приклади відео
 р.
р.
94502
Тепер деталі.
Проблеми:
При активному педаліції на двосуспендному велосипеді велика частка енергії попелиці витрачається на скелелазіння підвіски велосипеда, це стосується як задньої, так і передньої підвіски. Задня підвіска піддається гойдалці практично завжди, передня підвіска в основному піддається педальствующому "виходу". Щоб зробити це більш чітким, уявіть собі стоячи поруч з гірським велосипедом, який має ударно-абсорбуючу виделку і циклічно натискаючи / натискаючи виделку на землю. Щоб зробити це, ви витрачаєте енергію, таким же чином, ваша енергія була повністю без використання, коли ви педаль інтенсивно (наприклад, uphill). Що ж, якщо це не для «пострілу» амортизаторів, то вся енергія піде до корисної речі – обертів педаль.
Для вирішення цієї проблеми розроблені та впроваджені різні виробники підвіски для коливання траншеї. Контроль руху RockShox і Terralogic від FOX.
Це правда, що такі механічні системи покращують ефективність педалі, але вони не повністю усувають викиди енергії, так як всі ці рішення проходять.
Іншими словами, механічні системи не враховують різні зовнішні умови, такі як:
Тому останнім часом великі виробники велосипедів розробили «активні» підвісні системи, які враховують вище зовнішні умови, завдяки різним датчикам:
Датчики прискорення швидкості та каденів Геркони
Як звичайно було прийнято в нашій Батьківщині завдання була встановлена наступним чином: «Щоб перевершити іноземні аналоги в тактичних і технічних характеристиках кілька разів!». Тим не менш, ці іноземні продукти повинні технологічно зловити і перезавантажити такі показники:
Ефективність монтажу на наявному обладнанні (форк і амортизатор) з мінімальною модифікацією Можливість модифікації апаратних модифікацій (оновлення)Можливість модифікації обладнання (оновлення)Можливість модифікації програмної частини (оновлення)Робочий час від одного заряду Що було досягнуто:
1,1 км ККД
По-перше, на відміну від іноземних аналогів, контроль відбувається одночасно передній і задній підвіс.
По-друге, апаратне забезпечення (мікроконтролер) дозволяє реалізувати будь-які алгоритми керування підвіскою, використовуючи загальнодоступні інструменти, а саме мову програмування C++.
2. Розміри
Окремо підібрані компоненти так дрібні, що їх можна помістити в вилковий стрижень. Що таке «браїн» і батарея розміщуються безпосередньо в вільному просторі вилкового штанги.
Таким чином, розміри елемента управління не перевищують 200 мм по довжині, а шириною 22 мм. Реальний розмір близько 150x19.
Результатом є елегантне рішення, яке не видно навіть, і головне, нічого не вилипає і не займає правильного місця, як це зроблено тут (насипний акумуляторний пакет, прикріплений замість життєздатної води флакс):

3. У Вага.
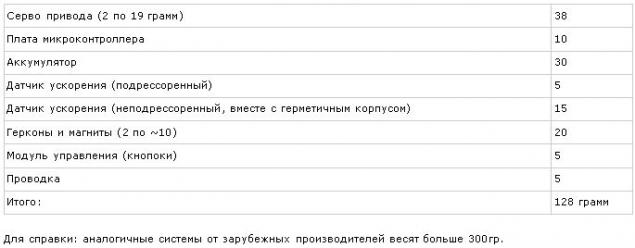
Для тих, хто не знайомий з велосипедом, вага є одним з основних критичних показників для обладнання велосипеда, що використовується в змаганнях. З цієї причини цей критерій приділяв особливу увагу. В результаті маса виявилася близько 120 грам. Це включає:
4. Інтелектуальна
Датчики та вміння програмувати мікроконтролер дозволяє реалізувати будь-який алгоритм у мові високого рівня c++. В результаті реалізуються наступні функції:
Ручний режим
У цьому режимі користувач може контролювати замки передньої і задні амортизаторів (туманки або окремо) через кнопки, розміщені під неопренними зчепленнями (поручка зрубу на кермо). Робота цього режиму можна побачити в відео вище. Незважаючи на свою простоту, цей режим є дуже зручною і корисною функцією, так як важелі замків амортизаторів дуже важко перекручувати руками при русі на велосипеді, особливо при високих швидкостях.
Напівавтоматичний режим
Таким чином, цей режим був розроблений для нових амортизаторів з FOX, які мають тенденцію КТД. Головною ідеєю цього режиму було використання максимальних механічних особливостей амортизаторів. Це, система, в залежності від датчиків, повинна вибрати один з трьох режимів КТД (Climb-Trail-Descent), що дає всю логіку для оптимізації роботи амортизаторів на самих амортизаторів. Режим вибирається шляхом обертання серво на певному куті, відповідному конкретному режимі експлуатації амортизатора.
На даний момент режими КТД вибираються на основі кута велосипеда. Іншими словами, це працює:
На велосипеді йде вгоруhill - режим Climb вимкнено. Велосипед йде в прямій лінії - режим Траиль. Велопрокат з гори - режим спуску. Регульовані ліміти переходу від режиму до режиму (значення нахилу лову в градусах). Також налаштовується час переходу з режиму до режиму.
Цей режим був розроблений спеціально для одного сильно поважного кулера (Я не буду ім'я його тому, що це угода), але він змінив спонсорів в останні хвилини, і установка системи на своєму новому велосипеді стала неможливим.
Ось як працює:
Автоматичний режим.
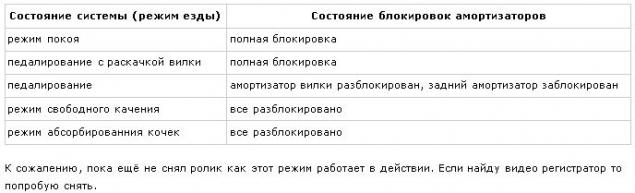
Це самий цікавий і складний режим, оскільки він призначений для максимальної ефективності педалінгу, розумно повороту на / вимкнення блокаторів амортизаторів в тих разів при необхідності.
Для реалізації цього режиму було виявлено кілька можливих системних станів і правил переходу, в короткий час це виглядає:
Системи за допомогою датчиків:
Датчик прискорення шпринг (в кунжутному штангі) датчик прискорення unsprung (на кунжутних штанах) датчик швидкості
Розрахунок наступних показників:
серйозність виделки в вертикальній площині і в площині перпендикулярно куту руху нахилу байкерака І базуючись на цих показниках, вибирає необхідний стан, переміщаючись з одного до іншого:
Джерело:
Так, в цій статті ми будемо говорити про внутрішній розвиток електронної системи управління підвіскою гірського велосипеда. Я не турбувати з тривалим введенням, просто до фотографій та відео:
12 зображень + опис + приклади відео
 р.
р.94502
Тепер деталі.
Проблеми:
При активному педаліції на двосуспендному велосипеді велика частка енергії попелиці витрачається на скелелазіння підвіски велосипеда, це стосується як задньої, так і передньої підвіски. Задня підвіска піддається гойдалці практично завжди, передня підвіска в основному піддається педальствующому "виходу". Щоб зробити це більш чітким, уявіть собі стоячи поруч з гірським велосипедом, який має ударно-абсорбуючу виделку і циклічно натискаючи / натискаючи виделку на землю. Щоб зробити це, ви витрачаєте енергію, таким же чином, ваша енергія була повністю без використання, коли ви педаль інтенсивно (наприклад, uphill). Що ж, якщо це не для «пострілу» амортизаторів, то вся енергія піде до корисної речі – обертів педаль.
Для вирішення цієї проблеми розроблені та впроваджені різні виробники підвіски для коливання траншеї. Контроль руху RockShox і Terralogic від FOX.
Це правда, що такі механічні системи покращують ефективність педалі, але вони не повністю усувають викиди енергії, так як всі ці рішення проходять.
Іншими словами, механічні системи не враховують різні зовнішні умови, такі як:
Тому останнім часом великі виробники велосипедів розробили «активні» підвісні системи, які враховують вище зовнішні умови, завдяки різним датчикам:
Датчики прискорення швидкості та каденів Геркони
Як звичайно було прийнято в нашій Батьківщині завдання була встановлена наступним чином: «Щоб перевершити іноземні аналоги в тактичних і технічних характеристиках кілька разів!». Тим не менш, ці іноземні продукти повинні технологічно зловити і перезавантажити такі показники:
Ефективність монтажу на наявному обладнанні (форк і амортизатор) з мінімальною модифікацією Можливість модифікації апаратних модифікацій (оновлення)Можливість модифікації обладнання (оновлення)Можливість модифікації програмної частини (оновлення)Робочий час від одного заряду Що було досягнуто:
1,1 км ККД
По-перше, на відміну від іноземних аналогів, контроль відбувається одночасно передній і задній підвіс.
По-друге, апаратне забезпечення (мікроконтролер) дозволяє реалізувати будь-які алгоритми керування підвіскою, використовуючи загальнодоступні інструменти, а саме мову програмування C++.
2. Розміри
Окремо підібрані компоненти так дрібні, що їх можна помістити в вилковий стрижень. Що таке «браїн» і батарея розміщуються безпосередньо в вільному просторі вилкового штанги.
Таким чином, розміри елемента управління не перевищують 200 мм по довжині, а шириною 22 мм. Реальний розмір близько 150x19.
Результатом є елегантне рішення, яке не видно навіть, і головне, нічого не вилипає і не займає правильного місця, як це зроблено тут (насипний акумуляторний пакет, прикріплений замість життєздатної води флакс):

3. У Вага.
Для тих, хто не знайомий з велосипедом, вага є одним з основних критичних показників для обладнання велосипеда, що використовується в змаганнях. З цієї причини цей критерій приділяв особливу увагу. В результаті маса виявилася близько 120 грам. Це включає:

4. Інтелектуальна
Датчики та вміння програмувати мікроконтролер дозволяє реалізувати будь-який алгоритм у мові високого рівня c++. В результаті реалізуються наступні функції:
Ручний режим
У цьому режимі користувач може контролювати замки передньої і задні амортизаторів (туманки або окремо) через кнопки, розміщені під неопренними зчепленнями (поручка зрубу на кермо). Робота цього режиму можна побачити в відео вище. Незважаючи на свою простоту, цей режим є дуже зручною і корисною функцією, так як важелі замків амортизаторів дуже важко перекручувати руками при русі на велосипеді, особливо при високих швидкостях.
Напівавтоматичний режим
Таким чином, цей режим був розроблений для нових амортизаторів з FOX, які мають тенденцію КТД. Головною ідеєю цього режиму було використання максимальних механічних особливостей амортизаторів. Це, система, в залежності від датчиків, повинна вибрати один з трьох режимів КТД (Climb-Trail-Descent), що дає всю логіку для оптимізації роботи амортизаторів на самих амортизаторів. Режим вибирається шляхом обертання серво на певному куті, відповідному конкретному режимі експлуатації амортизатора.
На даний момент режими КТД вибираються на основі кута велосипеда. Іншими словами, це працює:
На велосипеді йде вгоруhill - режим Climb вимкнено. Велосипед йде в прямій лінії - режим Траиль. Велопрокат з гори - режим спуску. Регульовані ліміти переходу від режиму до режиму (значення нахилу лову в градусах). Також налаштовується час переходу з режиму до режиму.
Цей режим був розроблений спеціально для одного сильно поважного кулера (Я не буду ім'я його тому, що це угода), але він змінив спонсорів в останні хвилини, і установка системи на своєму новому велосипеді стала неможливим.
Ось як працює:
Автоматичний режим.
Це самий цікавий і складний режим, оскільки він призначений для максимальної ефективності педалінгу, розумно повороту на / вимкнення блокаторів амортизаторів в тих разів при необхідності.
Для реалізації цього режиму було виявлено кілька можливих системних станів і правил переходу, в короткий час це виглядає:
Системи за допомогою датчиків:
Датчик прискорення шпринг (в кунжутному штангі) датчик прискорення unsprung (на кунжутних штанах) датчик швидкості
Розрахунок наступних показників:
серйозність виделки в вертикальній площині і в площині перпендикулярно куту руху нахилу байкерака І базуючись на цих показниках, вибирає необхідний стан, переміщаючись з одного до іншого:

Джерело: