623
Suspensión de control electrónico
Respetado comunidad, les presento a un informe de situación sobre el cruce de mis dos aficiones:. Ciclismo de montaña y microelectrónica
Por lo tanto, este artículo se centrará en el desarrollo de la producción nacional de control electrónico de bicicleta de montaña de la suspensión. No voy a atormentar a la larga entrada, derecho a las fotos y videos:
12 fotos + Descripción + vídeo ejemplos

Ahora los detalles.
Problema:
Con el pedaleo activo en el dvuhpodvesnom moto pasó una gran parte del jinete acumulación de energía en una suspensión de la bici, esto es cierto tanto para la parte trasera y la suspensión delantera. La suspensión trasera está sujeta a la acumulación de casi siempre, la suspensión delantera está expuesto principalmente al pedalear "en pie". Para hacerlo más claro, imagine que usted está de pie junto a la bicicleta de montaña que cuenta con un tenedor suspensión y las manos apretadas cíclicamente / prensas enchufe al suelo. Para hacer esto, usted está perdiendo su energía de la misma manera su energía se gasta completamente inútil cuando pedaliruete intensiva (por ejemplo, una montaña). Es decir, si no se "balancea" amortiguadores, toda la energía va al negocio beneficioso -. Pedaleo
Para solucionar este problema se han desarrollado e implementado por diferentes fabricantes son numerosos sistema de suspensión mecánica de balanceo de amortiguación. Tales como el control de movimiento por RockShox y Terralogic c ProPedal por FOX y otros.
No podemos aceptar que tales sistemas mecánicos sin duda a mejorar la eficiencia de pedaleo, pero todavía no elimina completamente la disipación de energía, ya que todas estas soluciones son "pasiva».
En otras palabras, los sistemas mecánicos no tienen en cuenta las diferentes condiciones ambientales, tales como:
DvizheniyaKadens velocidad (cadencia) La naturaleza de la superficie de la carretera es por qué, en los últimos años los principales fabricantes de bicicletas se han desarrollado sistemas de "activos" de control de la suspensión que tengan en cuenta las condiciones ambientales anteriores, gracias a los diferentes sensores:
Velocidad de Reed y kadensaDatchiki uskoreniyaIdeya:
Como de costumbre fue adoptada en nuestro país, el problema se plantea de la siguiente manera: "Para superar los análogos extranjeros en las características de rendimiento en un par de veces". A saber, que esos bienes extranjeros tenido que ponerse al día tecnológicamente y superar en los siguientes parámetros:
Sistema de emparejamiento EffektivnostGabarityVesVozmozhnost con bluetooth устройствамиИнтеллектуальностьДешевизнаДоступностьЛегкость instalación en los equipos existentes (tenedor y Amort) con un mínimo модификациейРемонтопригодностьОтказоустойчивостьВозможность modificaciones de hardware (actualizar) La capacidad de modificar la parte de software (actualización) Horas de uno zaryadaChego logra:
1.
Eficiencia
En primer lugar, en contraste con los análogos extranjeros, el control es a la vez la suspensión delantera y trasera.
En segundo lugar, el hardware (MCU) permite implementar cualquier algoritmo para el manejo de la suspensión, con fondos públicos, a saber, el lenguaje de programación C ++.
2. Dimensiones
Componentes especialmente seleccionados son tan pequeñas que permiten colocarlos en el stock de tenedor. Ese es el "cerebro" y la batería se colocan directamente en el espacio libre stock tenedor.
Por lo tanto el tamaño del elemento de control no supere los 200 mm de longitud y 22 mm de ancho. Las dimensiones reales son aproximadamente: 150h19
. El resultado es una solución elegante, que ni siquiera puede ver, y lo más importante, nada sobresale y no toma el lugar adecuado, ya que se hace aquí (batería voluminosos se adjunta en lugar de botellas de agua vitales con agua):

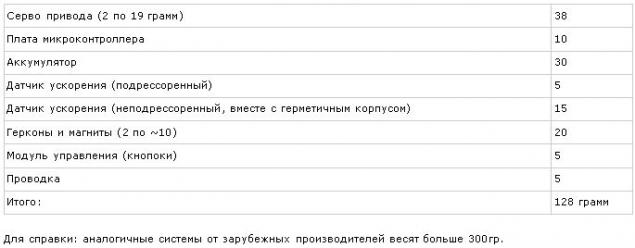
3. Peso
Para aquellos que no están familiarizados con el ciclismo voy a explicar que el peso es uno de los indicadores básicos para equipos críticos utilizados en las competiciones de bicicleta. Por esta razón, el criterio se asignó una atención especial. Como resultado, el aumento de peso de unos 120 gramos. En esta parte:
4.
Intelectual
Sensores y microcontrolador programable para implementar cualquier algoritmo en un alto nivel de lenguaje C ++. Como resultado, las siguientes características se implementan en la actualidad
Manual
En este modo el usuario puede controlar las cerraduras de los amortiguadores delanteros y traseros de choque (en conjunto o por separado) a través de los botones situados debajo de las empuñaduras de neopreno (una perilla de goma en el volante). El trabajo de este régimen se puede ver en el vídeo de arriba. A pesar de su simplicidad, esta opción es muy conveniente y útil característica, porque las palancas de bloqueo de choque es muy difícil de torcer los brazos al mover la moto, especialmente a altas velocidades.
Modo semiautomático
Sobre todo, esta modalidad está diseñado para los nuevos amortiguadores de la empresa FOX, que tienen palancas CTD. La idea básica para este modo fue la participación en las características mecánicas de los máximos de los amortiguadores. Ese es el sistema, dependiendo del sensor debe seleccionar uno de los tres modos de CTD (Suba-Trail-Descent), dando todo a merced de la lógica de la optimización de los amortiguadores en sí mismos. El modo se selecciona girando el actuador en un cierto ángulo correspondiente a un modo de funcionamiento particular del amortiguador.
En este punto, los modos de CTD se seleccionan sobre la base del ángulo de la bicicleta. En otras palabras, como funciona:
Andar en bicicleta cuesta arriba - incluido Climb rezhim.Bayk viaja en línea recta - Trail paseos rezhim.Bayk la montaña - el modo de descenso. Límites de transición del modo de establecer (la inclinación de captura en grados). Además, la transición desde el modo de tiempo de espera también configurable.
Este modo ha sido diseñado específicamente para un piloto muy respetado (no será llamado, porque el acuerdo es), pero en el último momento cambió de patrocinador, y la instalación del sistema en su nueva moto se ha vuelto imposible.
He aquí cómo funciona:
Modo automático
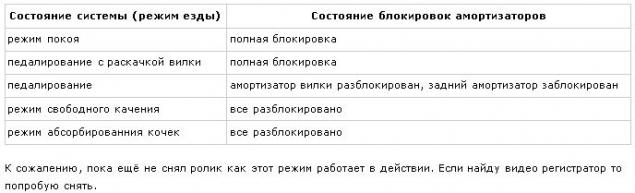
Es el modo más interesante y complejo, está diseñado como una manera de aumentar la eficiencia máxima de pedaleo por inteligente de encendido / apagado amortiguador de bloqueo es en esos momentos cuando la necesite.
Para la aplicación del régimen se han asignado un número de posibles estados del sistema y las reglas de transición entre ellos, en fin, que parece:
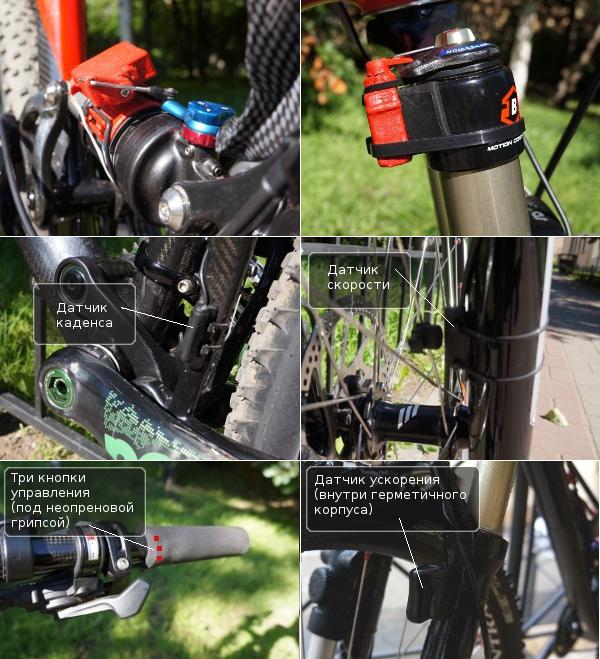
El sistema utilizando sensores:
sensor de aceleración suspendido (a tenedores de acciones) sensor de aceleración no suspendido (enchufe en los pantalones) sensor de cadencia skorostidatchik
Calcula los siguientes indicadores:
tenedor gravedad kochkiraskachku en el plano vertical y en el plano perpendicular a los baykaskorostkadens dvizheniyuugol pendiente y sobre la base de estos parámetros elegir el estado deseado, pasando de uno a otro:
Fuente:
Por lo tanto, este artículo se centrará en el desarrollo de la producción nacional de control electrónico de bicicleta de montaña de la suspensión. No voy a atormentar a la larga entrada, derecho a las fotos y videos:
12 fotos + Descripción + vídeo ejemplos


Ahora los detalles.
Problema:
Con el pedaleo activo en el dvuhpodvesnom moto pasó una gran parte del jinete acumulación de energía en una suspensión de la bici, esto es cierto tanto para la parte trasera y la suspensión delantera. La suspensión trasera está sujeta a la acumulación de casi siempre, la suspensión delantera está expuesto principalmente al pedalear "en pie". Para hacerlo más claro, imagine que usted está de pie junto a la bicicleta de montaña que cuenta con un tenedor suspensión y las manos apretadas cíclicamente / prensas enchufe al suelo. Para hacer esto, usted está perdiendo su energía de la misma manera su energía se gasta completamente inútil cuando pedaliruete intensiva (por ejemplo, una montaña). Es decir, si no se "balancea" amortiguadores, toda la energía va al negocio beneficioso -. Pedaleo
Para solucionar este problema se han desarrollado e implementado por diferentes fabricantes son numerosos sistema de suspensión mecánica de balanceo de amortiguación. Tales como el control de movimiento por RockShox y Terralogic c ProPedal por FOX y otros.
No podemos aceptar que tales sistemas mecánicos sin duda a mejorar la eficiencia de pedaleo, pero todavía no elimina completamente la disipación de energía, ya que todas estas soluciones son "pasiva».
En otras palabras, los sistemas mecánicos no tienen en cuenta las diferentes condiciones ambientales, tales como:
DvizheniyaKadens velocidad (cadencia) La naturaleza de la superficie de la carretera es por qué, en los últimos años los principales fabricantes de bicicletas se han desarrollado sistemas de "activos" de control de la suspensión que tengan en cuenta las condiciones ambientales anteriores, gracias a los diferentes sensores:
Velocidad de Reed y kadensaDatchiki uskoreniyaIdeya:
Como de costumbre fue adoptada en nuestro país, el problema se plantea de la siguiente manera: "Para superar los análogos extranjeros en las características de rendimiento en un par de veces". A saber, que esos bienes extranjeros tenido que ponerse al día tecnológicamente y superar en los siguientes parámetros:
Sistema de emparejamiento EffektivnostGabarityVesVozmozhnost con bluetooth устройствамиИнтеллектуальностьДешевизнаДоступностьЛегкость instalación en los equipos existentes (tenedor y Amort) con un mínimo модификациейРемонтопригодностьОтказоустойчивостьВозможность modificaciones de hardware (actualizar) La capacidad de modificar la parte de software (actualización) Horas de uno zaryadaChego logra:
1.
Eficiencia
En primer lugar, en contraste con los análogos extranjeros, el control es a la vez la suspensión delantera y trasera.
En segundo lugar, el hardware (MCU) permite implementar cualquier algoritmo para el manejo de la suspensión, con fondos públicos, a saber, el lenguaje de programación C ++.
2. Dimensiones
Componentes especialmente seleccionados son tan pequeñas que permiten colocarlos en el stock de tenedor. Ese es el "cerebro" y la batería se colocan directamente en el espacio libre stock tenedor.
Por lo tanto el tamaño del elemento de control no supere los 200 mm de longitud y 22 mm de ancho. Las dimensiones reales son aproximadamente: 150h19
. El resultado es una solución elegante, que ni siquiera puede ver, y lo más importante, nada sobresale y no toma el lugar adecuado, ya que se hace aquí (batería voluminosos se adjunta en lugar de botellas de agua vitales con agua):

3. Peso
Para aquellos que no están familiarizados con el ciclismo voy a explicar que el peso es uno de los indicadores básicos para equipos críticos utilizados en las competiciones de bicicleta. Por esta razón, el criterio se asignó una atención especial. Como resultado, el aumento de peso de unos 120 gramos. En esta parte:

4.
Intelectual
Sensores y microcontrolador programable para implementar cualquier algoritmo en un alto nivel de lenguaje C ++. Como resultado, las siguientes características se implementan en la actualidad
Manual
En este modo el usuario puede controlar las cerraduras de los amortiguadores delanteros y traseros de choque (en conjunto o por separado) a través de los botones situados debajo de las empuñaduras de neopreno (una perilla de goma en el volante). El trabajo de este régimen se puede ver en el vídeo de arriba. A pesar de su simplicidad, esta opción es muy conveniente y útil característica, porque las palancas de bloqueo de choque es muy difícil de torcer los brazos al mover la moto, especialmente a altas velocidades.
Modo semiautomático
Sobre todo, esta modalidad está diseñado para los nuevos amortiguadores de la empresa FOX, que tienen palancas CTD. La idea básica para este modo fue la participación en las características mecánicas de los máximos de los amortiguadores. Ese es el sistema, dependiendo del sensor debe seleccionar uno de los tres modos de CTD (Suba-Trail-Descent), dando todo a merced de la lógica de la optimización de los amortiguadores en sí mismos. El modo se selecciona girando el actuador en un cierto ángulo correspondiente a un modo de funcionamiento particular del amortiguador.
En este punto, los modos de CTD se seleccionan sobre la base del ángulo de la bicicleta. En otras palabras, como funciona:
Andar en bicicleta cuesta arriba - incluido Climb rezhim.Bayk viaja en línea recta - Trail paseos rezhim.Bayk la montaña - el modo de descenso. Límites de transición del modo de establecer (la inclinación de captura en grados). Además, la transición desde el modo de tiempo de espera también configurable.
Este modo ha sido diseñado específicamente para un piloto muy respetado (no será llamado, porque el acuerdo es), pero en el último momento cambió de patrocinador, y la instalación del sistema en su nueva moto se ha vuelto imposible.
He aquí cómo funciona:
Modo automático
Es el modo más interesante y complejo, está diseñado como una manera de aumentar la eficiencia máxima de pedaleo por inteligente de encendido / apagado amortiguador de bloqueo es en esos momentos cuando la necesite.
Para la aplicación del régimen se han asignado un número de posibles estados del sistema y las reglas de transición entre ellos, en fin, que parece:
El sistema utilizando sensores:
sensor de aceleración suspendido (a tenedores de acciones) sensor de aceleración no suspendido (enchufe en los pantalones) sensor de cadencia skorostidatchik
Calcula los siguientes indicadores:
tenedor gravedad kochkiraskachku en el plano vertical y en el plano perpendicular a los baykaskorostkadens dvizheniyuugol pendiente y sobre la base de estos parámetros elegir el estado deseado, pasando de uno a otro:

Fuente: