619
电子控制悬架
尊敬的社区,我向你穿越我的两大爱好的进度报告:山地自行车和微电子
因此,本文将重点放在国内的电子控制避震山地车的发展。我不会折磨的长项,右边的照片和视频:
12张照片+说明+视频的例子

现在的细节。
问题:
用在自行车上dvuhpodvesnom活性蹬踏花费的能量积聚骑手的一大部分上的自行车悬架,这是适用于两者后部和前悬挂。后悬挂是受建设几乎总是,蹬车时,前悬挂主要承受“的地位。”为了更清晰地想象你站在旁边的山地自行车,有压循环/机插在地上一个避震前叉和手。要做到这一点,你是在浪费你的精力以同样的方式你的精力都花在当您pedaliruete集中完全无用的(如一座山)。也就是说,如果没有“摇摆”减震器,所有的精力都投入到有益于企业 - 蹬踏
为了解决这个问题已经开发并通过不同的制造商实现的众多机械悬挂系统减振摆动。如运动控制由FOX和其他ROCKSHOX和TerralogicÇProPedal。
我们不能同意这样的机械系统确实提高蹬踏效率,但仍然无法完全消除功耗,因为所有这些解决方案都是“被动»。
换句话说,机械系统不考虑不同的环境条件,如:
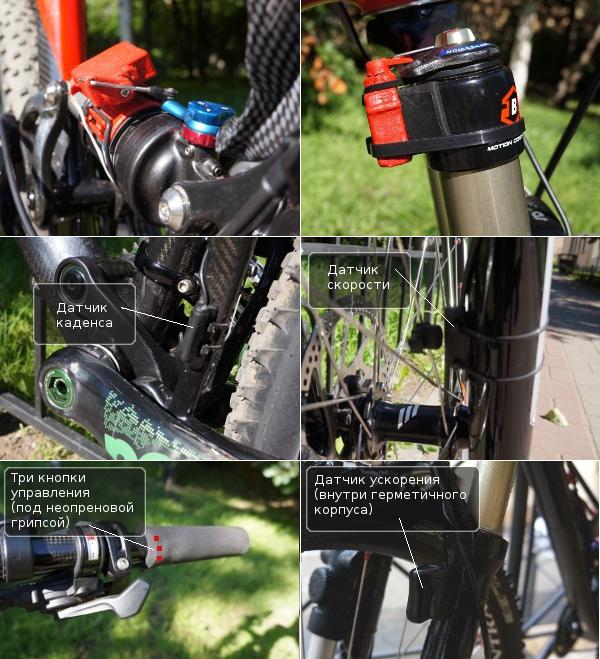
DvizheniyaKadens速度(节奏)路面的性质是什么原因,近几年各大自行车生产企业已经开发出“主动”悬挂控制系统,考虑到上述环境条件下,由于不同的传感器:
里德速度和kadensaDatchiki uskoreniyaIdeya:
像往常一样,它是在我们的国家采用,问题提出如下:“超越的性能特点的外国类似物几次”。也就是说,这些外国商品不得不追赶技术上和超车以下参数:
EffektivnostGabarityVesVozmozhnost配对系统,蓝牙устройствамиИнтеллектуальностьДешевизнаДоступностьЛегкость在现有设备上(fork和垂头丧气)只需简单安装модификациейРемонтопригодностьОтказоустойчивостьВозможность硬件修改(升级)来修改软件部分(升级)营业时间从一个zaryadaChego实现的功能:
1.效率
首先,在对比外国类似物,控制是同时对前后悬挂。
二,硬件(MCU),可以实现任何算法来管理悬挂,使用公共资金,即C ++编程语言。
2.尺寸
精心挑选的组件是如此之小,它们允许将它们放置在股票叉。这就是“大脑”和电池直接在自由空间的股票叉放置。
因此,控制元件的尺寸不超过在宽度200毫米的长度和22毫米。真正的尺寸大约是:150h19
。 其结果是一个完美的解决方案,它甚至不能看到,而最重要的,没有伸出,不采取正确的地方,因为它是在这里完成(笨重的电池组已经安装到位的重要水壶加水):

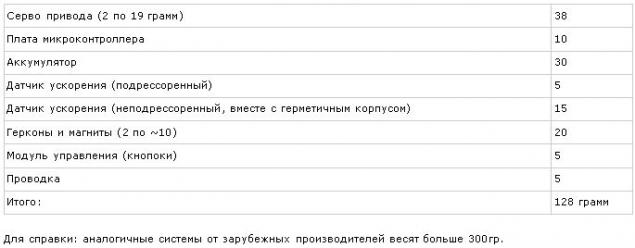
3.重量
对于那些谁不熟悉骑自行车,我会解释说,体重的基本指标在自行车比赛中使用的关键设备之一。由于这个原因,该标准被分配特别注意。其结果是,获得重量约120克。在这一部分:
4.智能
传感器和可编程微控制器,以实现高级语言C ++的任何算法。其结果,下面的特征被此刻实施:
手册
在这种模式下,用户可以控制锁的前部和后部减震器(一起或分开)通过位于下氯丁握住按钮(在方向盘上的橡胶旋钮)。这一制度的工作可以在上面的视频中可以看出。尽管它的简单,这个选项是非常方便和实用的功能,因为杠杆锁定震撼是很难扭转手臂运动自行车的时候,尤其是在高速行驶时。
半自动模式
大多数情况下,这种模式是专为从公司FOX新的减震器,具有杠杆CTD。此模式的基本思想是参与减震器的最大机械特性。这是系统根据传感器必须选择以下三种模式之一CTD(攀登-TRAIL-下降),在对自己的减震器的优化的逻辑的摆布给予所有。该模式通过转动致动器在相应于减震器的特定操作模式一定的角度。
在这一点上,CTD模式的自行车的角度的基础上选择。换句话说,它是如何工作的:
骑自行车上坡 - 包括攀登rezhim.Bayk行进在一条直线上 - 开拓者骑rezhim.Bayk山 - 暗袭模式。从模式限制转型为集(度捕捞倾角)。还有,从超时模式过渡到也可配置的。
这种模式是专门设计用于德高望重的车手(不会被命名,因为该协议),但在最后时刻,他改变了自己的赞助商,并安装在系统上的新的自行车已经成为不可能的事情。
下面是它如何工作的:
自动模式
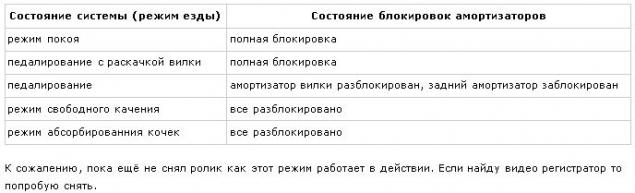
这是最有趣和最复杂的模式,被设计成一种通过智能化来增加开/关阻尼器锁定在那些时刻,当你需要它的最大踏效率。
对于制度的实施已分配了一些系统的可能状态以及它们之间的过渡规则,总之,它看起来像:
使用传感器系统:
弹簧上加速度传感器(股票叉)非簧载加速度传感器(塞在裤子)skorostidatchik节奏传感器
计算如下指标:
在垂直平面和在平面垂直于坡dvizheniyuugol baykaskorostkadens而且这些参数的基础上严重性kochkiraskachku叉选择所需的状态下,从一个到另一个传递:
资料来源:
因此,本文将重点放在国内的电子控制避震山地车的发展。我不会折磨的长项,右边的照片和视频:
12张照片+说明+视频的例子


现在的细节。
问题:
用在自行车上dvuhpodvesnom活性蹬踏花费的能量积聚骑手的一大部分上的自行车悬架,这是适用于两者后部和前悬挂。后悬挂是受建设几乎总是,蹬车时,前悬挂主要承受“的地位。”为了更清晰地想象你站在旁边的山地自行车,有压循环/机插在地上一个避震前叉和手。要做到这一点,你是在浪费你的精力以同样的方式你的精力都花在当您pedaliruete集中完全无用的(如一座山)。也就是说,如果没有“摇摆”减震器,所有的精力都投入到有益于企业 - 蹬踏
为了解决这个问题已经开发并通过不同的制造商实现的众多机械悬挂系统减振摆动。如运动控制由FOX和其他ROCKSHOX和TerralogicÇProPedal。
我们不能同意这样的机械系统确实提高蹬踏效率,但仍然无法完全消除功耗,因为所有这些解决方案都是“被动»。
换句话说,机械系统不考虑不同的环境条件,如:
DvizheniyaKadens速度(节奏)路面的性质是什么原因,近几年各大自行车生产企业已经开发出“主动”悬挂控制系统,考虑到上述环境条件下,由于不同的传感器:
里德速度和kadensaDatchiki uskoreniyaIdeya:
像往常一样,它是在我们的国家采用,问题提出如下:“超越的性能特点的外国类似物几次”。也就是说,这些外国商品不得不追赶技术上和超车以下参数:
EffektivnostGabarityVesVozmozhnost配对系统,蓝牙устройствамиИнтеллектуальностьДешевизнаДоступностьЛегкость在现有设备上(fork和垂头丧气)只需简单安装модификациейРемонтопригодностьОтказоустойчивостьВозможность硬件修改(升级)来修改软件部分(升级)营业时间从一个zaryadaChego实现的功能:
1.效率
首先,在对比外国类似物,控制是同时对前后悬挂。
二,硬件(MCU),可以实现任何算法来管理悬挂,使用公共资金,即C ++编程语言。
2.尺寸
精心挑选的组件是如此之小,它们允许将它们放置在股票叉。这就是“大脑”和电池直接在自由空间的股票叉放置。
因此,控制元件的尺寸不超过在宽度200毫米的长度和22毫米。真正的尺寸大约是:150h19
。 其结果是一个完美的解决方案,它甚至不能看到,而最重要的,没有伸出,不采取正确的地方,因为它是在这里完成(笨重的电池组已经安装到位的重要水壶加水):

3.重量
对于那些谁不熟悉骑自行车,我会解释说,体重的基本指标在自行车比赛中使用的关键设备之一。由于这个原因,该标准被分配特别注意。其结果是,获得重量约120克。在这一部分:

4.智能
传感器和可编程微控制器,以实现高级语言C ++的任何算法。其结果,下面的特征被此刻实施:
手册
在这种模式下,用户可以控制锁的前部和后部减震器(一起或分开)通过位于下氯丁握住按钮(在方向盘上的橡胶旋钮)。这一制度的工作可以在上面的视频中可以看出。尽管它的简单,这个选项是非常方便和实用的功能,因为杠杆锁定震撼是很难扭转手臂运动自行车的时候,尤其是在高速行驶时。
半自动模式
大多数情况下,这种模式是专为从公司FOX新的减震器,具有杠杆CTD。此模式的基本思想是参与减震器的最大机械特性。这是系统根据传感器必须选择以下三种模式之一CTD(攀登-TRAIL-下降),在对自己的减震器的优化的逻辑的摆布给予所有。该模式通过转动致动器在相应于减震器的特定操作模式一定的角度。
在这一点上,CTD模式的自行车的角度的基础上选择。换句话说,它是如何工作的:
骑自行车上坡 - 包括攀登rezhim.Bayk行进在一条直线上 - 开拓者骑rezhim.Bayk山 - 暗袭模式。从模式限制转型为集(度捕捞倾角)。还有,从超时模式过渡到也可配置的。
这种模式是专门设计用于德高望重的车手(不会被命名,因为该协议),但在最后时刻,他改变了自己的赞助商,并安装在系统上的新的自行车已经成为不可能的事情。
下面是它如何工作的:
自动模式
这是最有趣和最复杂的模式,被设计成一种通过智能化来增加开/关阻尼器锁定在那些时刻,当你需要它的最大踏效率。
对于制度的实施已分配了一些系统的可能状态以及它们之间的过渡规则,总之,它看起来像:
使用传感器系统:
弹簧上加速度传感器(股票叉)非簧载加速度传感器(塞在裤子)skorostidatchik节奏传感器
计算如下指标:
在垂直平面和在平面垂直于坡dvizheniyuugol baykaskorostkadens而且这些参数的基础上严重性kochkiraskachku叉选择所需的状态下,从一个到另一个传递:

资料来源: