Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
624
0.1
2015-07-04
Электронная система управления подвеской
Уважаемое сообщество, представляю вашему вниманию отчет о проделанной работе по скрещиванию моих двух хобби: горный велосипед и микроэлектроника.
Итак, в этой статье речь пойдет об отечественной разработке электронной системы управления подвеской горного велосипеда. Не буду мучить длинным вступлением, сразу к фото и видео:
12 картинок + описание + видео примеры

Теперь подробности.
Проблема:
При активном педалировании на двухподвесном байке затрачивается большая доля энергии ездока на раскачку подвески байка, это справедливо как для задней так и передней подвески. Задняя подвеска подвержена раскачки почти всегда, передняя подвеска в основном подвержена при педалировании «стоя». Чтобы было понятнее представьте что вы стоите рядом с горным велосипедом у которого есть амортизационная вилка и руками циклично вдавливаете/прижимаете вилку к земле. Для этого вы тратите свою энергию, таким же способом ваша энергия тратится совершенно бесполезно когда вы интенсивно педалируете (например в гору). То есть если бы не «раскачка» амортизаторов, то вся энергия уходила бы на полезное дело — кручение педалей.
Для решения данной проблемы были разработаны и внедрены различными производителями подвесок многочисленные механические системы для гашения колебаний раскачки. Такие как Motion Control от RockShox и Terralogic c ProPedal от FOX и др.
Нельзя не согласиться что такие механические системы конечно же улучшают эффективность педалирования, но всё же не устраняют полностью рассеивание энергии, поскольку все эти решения являются «пассивными».
Другими словами, механические системы не учитывают различные внешние условия, такие как:
Скорость движенияКаденс (частота педалирования)Характер поверхности дороги Поэтому, в последнее время крупными производителями велосипедов были разработаны «активные» системы управления подвеской, которые учитывают перечисленные выше внешние условия, благодаря различным датчикам:
Герконы скорости и каденсаДатчики ускоренияИдея:
Как обычно это было принято на нашей родине, задача была поставлена следующая: «Превзойти зарубежные аналоги по тактико-техническим характеристикам в несколько раз!». А именно, вот эти зарубежные изделия необходимо было технологически догнать и обогнать по следующим показателям:
ЭффективностьГабаритыВесВозможность сопряжение системы с bluetooth устройствамиИнтеллектуальностьДешевизнаДоступностьЛегкость установки на имеющиеся оборудование (вилку и аморт) с минимальной модификациейРемонтопригодностьОтказоустойчивостьВозможность модификаций аппаратной части (апгрейд)Возможность модификации программной части (апгрейд)Время работы от одного зарядаЧего удалось достичь:
1. Эффективность
Во-первых, в отличие от зарубежных аналогов, управление происходит одновременно передней и задней подвеской.
Во-вторых, аппаратная часть (микроконтроллер) позволяет реализовывать любые алгоритмы по управлению подвеской, используя общедоступные средства, а именно язык программирования C++.
2. Габариты
Специально подобранные компоненты настолько малы, что позволяют разместить их в штоке вилки. То есть «мозг» и аккумулятор размещаются непосредственно в свободном пространстве штока вилки.
Таким образом размеры управляющего элемента не превышают 200мм по длине, и 22мм по ширине. Реальные размеры примерно такие: 150х19.
В итоге получается элегантное решение, которого даже не видно, и самое главное, ничего не торчит и не занимает нужного места как это сделано тут (громоздкий блок аккумуляторов прикрепленный вместо жизненно важной фляжки с водой):

3. Вес
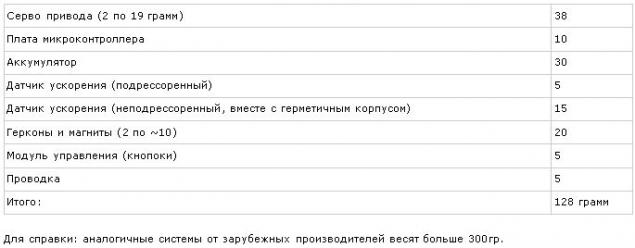
Для тех кто мало знаком с велоспортом поясню, что вес является одним из основных критичных показателей для оборудования велосипеда использующегося в соревнованиях. По этой причине, данному критерию было выделено особое внимание. В итоге, вес получился около 120 грамм. В это входит:
4. Интеллектуальность
Датчики и возможность программирования микроконтроллера позволяют реализовать любой алгоритм на высокоуровневом языке c++. В итоге следующие особенности реализованы на данный момент:
Ручной режим
В этом режиме пользователю доступно управление блокировками переднего и заднего амортизаторов (совместно или в отдельности) через кнопки размещенные под неопреновой грипсой (резиновой ручкой на руле). Работу этого режима можно увидеть на видео выше. Несмотря на простоту, этот режим является очень удобной и полезной возможностью, поскольку рычажки блокировок амортизаторов очень сложно крутить руками при движении на байке, особенно на высоких скоростях.
Полуавтоматический режим
Главным образом, этот режим разрабатывался для новых амортизаторов от компании FOX, которые имеют рычажки CTD. Основной идеей для этого режима было задействование по-максимуму механических особенностей амортизаторов. То есть система в зависимости от датчиков должна выбирать один из трех режимов CTD (Climb-Trail-Descent), отдавая на откуп всю логику по оптимизации работы амортизаторов на сами амортизаторы. Режим выбирается путем поворота сервопривода на определенный угол, соответствующий конкретному режиму работы амортизатора.
На данный момент, режимы CTD выбираются на основании угла наклона байка. Другими словами работает это так:
Байк едет в гору — включается Climb режим.Байк едет по прямой — Trail режим.Байк едет с горы — Descent режим. Пределы перехода с режима на режим настраиваются (значение улов наклона в градусах). Также таймаут перехода с режима на режим тоже настраивается.
Этот режим был разработан специально для одного весьма уважаемого гонщика (не буду называть его имени, ибо договорились так), но он в последний момент сменил спонсора, и установка системы на его новый байк стала невозможной.
Вот как это работает:
Автоматический режим
Это самый интересный и сложный режим, поскольку призван максимальным образом увеличить эффективность педалирования, путем интеллектуального включения/выключения блокировок амортизаторов именно в те моменты когда это необходимо.
Для реализации этого режима были выделены несколько возможных состояний системы и правила перехода между ними, вкратце это выглядит так:
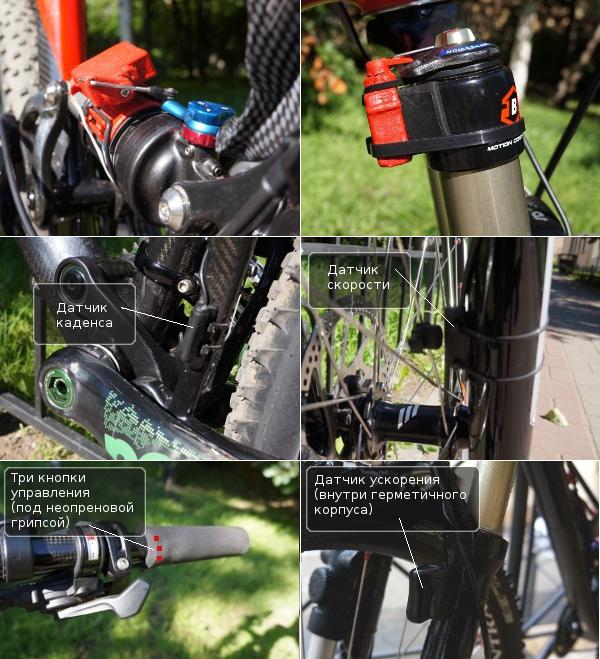
Система используя датчики:
датчик ускорения подрессоренный (в штоке вилки)датчик ускорения неподрессоренный (на штанах вилки)датчик скоростидатчик каденса
Вычисляет следующие показатели:
серьезность кочкираскачку вилки в вертикальной плоскости и в плоскости перпендикулярной к движениюугол наклона байкаскоростькаденс И на основании этих показателей выбирает необходимое состояние, переходя с одного на другое:
Источник: www.yaplakal.com/
Итак, в этой статье речь пойдет об отечественной разработке электронной системы управления подвеской горного велосипеда. Не буду мучить длинным вступлением, сразу к фото и видео:
12 картинок + описание + видео примеры


Теперь подробности.
Проблема:
При активном педалировании на двухподвесном байке затрачивается большая доля энергии ездока на раскачку подвески байка, это справедливо как для задней так и передней подвески. Задняя подвеска подвержена раскачки почти всегда, передняя подвеска в основном подвержена при педалировании «стоя». Чтобы было понятнее представьте что вы стоите рядом с горным велосипедом у которого есть амортизационная вилка и руками циклично вдавливаете/прижимаете вилку к земле. Для этого вы тратите свою энергию, таким же способом ваша энергия тратится совершенно бесполезно когда вы интенсивно педалируете (например в гору). То есть если бы не «раскачка» амортизаторов, то вся энергия уходила бы на полезное дело — кручение педалей.
Для решения данной проблемы были разработаны и внедрены различными производителями подвесок многочисленные механические системы для гашения колебаний раскачки. Такие как Motion Control от RockShox и Terralogic c ProPedal от FOX и др.
Нельзя не согласиться что такие механические системы конечно же улучшают эффективность педалирования, но всё же не устраняют полностью рассеивание энергии, поскольку все эти решения являются «пассивными».
Другими словами, механические системы не учитывают различные внешние условия, такие как:
Скорость движенияКаденс (частота педалирования)Характер поверхности дороги Поэтому, в последнее время крупными производителями велосипедов были разработаны «активные» системы управления подвеской, которые учитывают перечисленные выше внешние условия, благодаря различным датчикам:
Герконы скорости и каденсаДатчики ускоренияИдея:
Как обычно это было принято на нашей родине, задача была поставлена следующая: «Превзойти зарубежные аналоги по тактико-техническим характеристикам в несколько раз!». А именно, вот эти зарубежные изделия необходимо было технологически догнать и обогнать по следующим показателям:
ЭффективностьГабаритыВесВозможность сопряжение системы с bluetooth устройствамиИнтеллектуальностьДешевизнаДоступностьЛегкость установки на имеющиеся оборудование (вилку и аморт) с минимальной модификациейРемонтопригодностьОтказоустойчивостьВозможность модификаций аппаратной части (апгрейд)Возможность модификации программной части (апгрейд)Время работы от одного зарядаЧего удалось достичь:
1. Эффективность
Во-первых, в отличие от зарубежных аналогов, управление происходит одновременно передней и задней подвеской.
Во-вторых, аппаратная часть (микроконтроллер) позволяет реализовывать любые алгоритмы по управлению подвеской, используя общедоступные средства, а именно язык программирования C++.
2. Габариты
Специально подобранные компоненты настолько малы, что позволяют разместить их в штоке вилки. То есть «мозг» и аккумулятор размещаются непосредственно в свободном пространстве штока вилки.
Таким образом размеры управляющего элемента не превышают 200мм по длине, и 22мм по ширине. Реальные размеры примерно такие: 150х19.
В итоге получается элегантное решение, которого даже не видно, и самое главное, ничего не торчит и не занимает нужного места как это сделано тут (громоздкий блок аккумуляторов прикрепленный вместо жизненно важной фляжки с водой):

3. Вес
Для тех кто мало знаком с велоспортом поясню, что вес является одним из основных критичных показателей для оборудования велосипеда использующегося в соревнованиях. По этой причине, данному критерию было выделено особое внимание. В итоге, вес получился около 120 грамм. В это входит:

4. Интеллектуальность
Датчики и возможность программирования микроконтроллера позволяют реализовать любой алгоритм на высокоуровневом языке c++. В итоге следующие особенности реализованы на данный момент:
Ручной режим
В этом режиме пользователю доступно управление блокировками переднего и заднего амортизаторов (совместно или в отдельности) через кнопки размещенные под неопреновой грипсой (резиновой ручкой на руле). Работу этого режима можно увидеть на видео выше. Несмотря на простоту, этот режим является очень удобной и полезной возможностью, поскольку рычажки блокировок амортизаторов очень сложно крутить руками при движении на байке, особенно на высоких скоростях.
Полуавтоматический режим
Главным образом, этот режим разрабатывался для новых амортизаторов от компании FOX, которые имеют рычажки CTD. Основной идеей для этого режима было задействование по-максимуму механических особенностей амортизаторов. То есть система в зависимости от датчиков должна выбирать один из трех режимов CTD (Climb-Trail-Descent), отдавая на откуп всю логику по оптимизации работы амортизаторов на сами амортизаторы. Режим выбирается путем поворота сервопривода на определенный угол, соответствующий конкретному режиму работы амортизатора.
На данный момент, режимы CTD выбираются на основании угла наклона байка. Другими словами работает это так:
Байк едет в гору — включается Climb режим.Байк едет по прямой — Trail режим.Байк едет с горы — Descent режим. Пределы перехода с режима на режим настраиваются (значение улов наклона в градусах). Также таймаут перехода с режима на режим тоже настраивается.
Этот режим был разработан специально для одного весьма уважаемого гонщика (не буду называть его имени, ибо договорились так), но он в последний момент сменил спонсора, и установка системы на его новый байк стала невозможной.
Вот как это работает:
Автоматический режим
Это самый интересный и сложный режим, поскольку призван максимальным образом увеличить эффективность педалирования, путем интеллектуального включения/выключения блокировок амортизаторов именно в те моменты когда это необходимо.
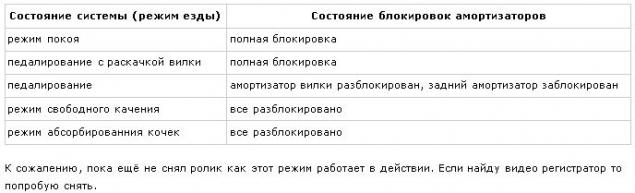
Для реализации этого режима были выделены несколько возможных состояний системы и правила перехода между ними, вкратце это выглядит так:
Система используя датчики:
датчик ускорения подрессоренный (в штоке вилки)датчик ускорения неподрессоренный (на штанах вилки)датчик скоростидатчик каденса
Вычисляет следующие показатели:
серьезность кочкираскачку вилки в вертикальной плоскости и в плоскости перпендикулярной к движениюугол наклона байкаскоростькаденс И на основании этих показателей выбирает необходимое состояние, переходя с одного на другое:

Источник: www.yaplakal.com/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.