Жизнь — интересная!
Подписывайтесь на нашу группу в Telegram и Facebook, чтобы быть в сообществе единомышленников, находить вдохновение и не пропускать свежие и удивительные статьи с bashny.net.
890
0.2
2015-04-01
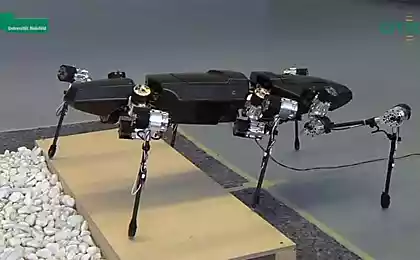
Для робота Hector разработали программу развития рефлексивного самосознания

На GT уже рассказывали о роботе-насекомом Hector, который умеет прокладывать путь (забегая вперёд, за это отвечает нейросеть под названием Navinet) и адаптироваться к разным поверхностям (программа Walknet).
Разработчики этого необычного робота — д-р Мальте Шиллинг (Malte Schilling) и профессор д-р Холк Крас (Holk Cruse) из группы Cluster of Excellence Cognitive Interaction Technology (CITEC) в Билефельдском университете (Германия). Сейчас они заявили, что новая нейросеть под названием reaCog позволит роботу постепенно развить в себе рефлексивное самосознание и эмоции!
Авторы уверены, что некоторые элементы их программного обеспечения впервые в мире реализуют подобную функциональность у роботов.
Новая программа для Hector не только сможет придумывать новые маршруты для достижения цели и предварительно оценивать эффективность этих воображаемых маршрутов, но сможет корректировать свои действия в соответствии с предполагаемыми ожиданиями других объектов относительно своих действий.
Другими словами, робот сможет как бы смотреть на себя «со стороны» чужими глазами — и корректировать поведение соответственно. Это и называется рефлексивным самосознанием, когда существо осознаёт факт своего существования и своё текущее состояние в эмоциональном плане (внутренне ментальное состояние).
Под «эмоциями» учёные подразумевают техническое определение различных коэффициентов, вычисляемых на основании реального наблюдения робота за своим поведением. Например, счастливый человек быстрее принимает решения и более склонен к риску, чем тревожный человек. В робота заложены похожие критерии. Если внутреннее ментальное состояние соответствует тревожному поведению, то программа расчёта маршрута получит больше времени для работы.
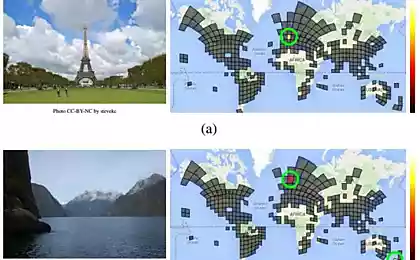
На схеме ниже показана сеть, контролирующая систему ответных реакций на раздражители Hector. Модули мотивации красного цвета формируют рекуррентную нейронную сеть, которая принимает в расчёт различные состояния аттракторов (показаны только контроллеры для двух ног). Стрелки соответствуют возбудительному влиянию. T-образные коннекторы отображают сдерживающее влияние (fw forward, bw backward, r1 coordination rule 1). Мотивационные модули в нижней части схемы управляют процедурами (swing, stance), в том числе внутреннюю модель тела (синим цветом). Тело отмечено пунктирной линией (leg). Здесь изображена сеть Navinet, которая выбирает направление движения робота.

Статья «Ментальные состояния как развивающиеся свойства. От передвижения к самосознанию» (“Mental States as Emergent Properties. From Walking to Consciousness”) опубликована в 2000-страничном сборнике статей Open MIND, издание которого приурочен к десятилетию деятельности организации по исследованию искусственного интеллекта MIND-Group и содержит 39 оригинальных статей по философии, психологии и неврологии. Сборник доступен в онлайне и в печатной версии. Вы часто рефлексируете о своём ментальном состоянии?
| Да, часто |
| Нет, предпочитаю не рефлексировать |
Источник: geektimes.ru/post/248242/
Портал БАШНЯ. Копирование, Перепечатка возможна при указании активной ссылки на данную страницу.
































Занятия спортом на улице: что может пригодиться техногику? Часть 2
Углеродная пыль могла «закоптить» Меркурий