893
Hector robot development program of reflexive self-awareness

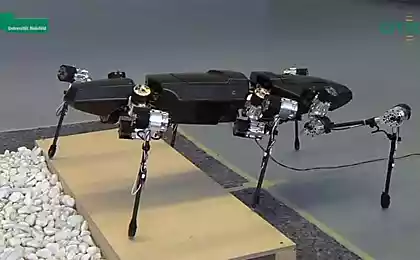
On the GT already told about a robot-insect Hector, who is able to lead the way (looking ahead, is responsible for this neural network called Navinet) and adapt to different surfaces (program Walknet).
The developers of this unusual robot - Dr. Schilling Malta (Malte Schilling) and Prof. Dr. Holk Cruse (Holk Cruse) from the group Cluster of Excellence Cognitive Interaction Technology (CITEC) at the University of Bielefeld (Germany). Now they said , the new neural network called reaCog allow the robot to gradually develop a self-reflexive and emotions!
The authors believe that some elements of their software for the first time in the world are implementing similar functionality robots.
New program to Hector not only be able to come up with new ways to achieve the objective and pre-assess the effectiveness of these imaginary routes, but will adjust their actions in accordance with the anticipated expectations of other objects relative to their actions.
In other words, the robot will like to look at myself "by" someone else's eyes - and adjust behavior accordingly. This is called reflexive self-consciousness when being aware of their existence and their current status in emotional terms (internal mental state).
Under the "emotions" scientists mean the technical definition of the various factors that are calculated based on the actual observation of the robot for their behavior. For example, happy people make decisions faster and more risk-averse than the anxious person. In robot incorporated similar criteria. If the internal mental state corresponds to anxious behavior, the program for calculating the route will get more time to work.
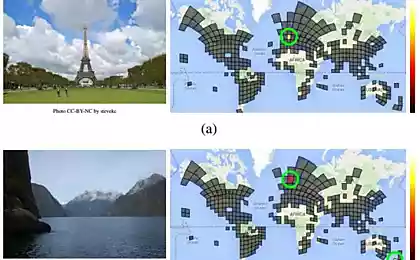
The diagram below shows a network that controls the system responses to stimuli Hector. Modules motivation red shape recurrent neural network that takes into account the different states of attractors (only controllers for two legs). The arrows correspond to the excitatory influence. T-shaped connectors represent a deterrent effect (fw forward, bw backward, r1 coordination rule 1). Motivational modules in the lower part of the circuit control procedures (swing, stance), including an internal model of the body (in blue). The body is marked by a dotted line (leg). Here is shown a network Navinet, which selects the direction of movement of the robot.

The article "Mental states as developing properties. From movement to self-consciousness »(" Mental States as Emergent Properties. From Walking to Consciousness ") опубликована 2000-page collection of articles Open MIND , edition of which is dated to the tenth anniversary of the organization for the study of artificial intelligence MIND-Group and contains 39 original articles on philosophy, psychology and neurology. Collection is available online and in the printed version. You often refleksiruete about his mental state?
| Yes, often |
| No, I prefer not to reflect Voted 15 people. 11 people abstained. Only registered users can vote in polls. Sign , please. Source: geektimes.ru/post/248242/ |