502
The Swiss designed the robot-cat
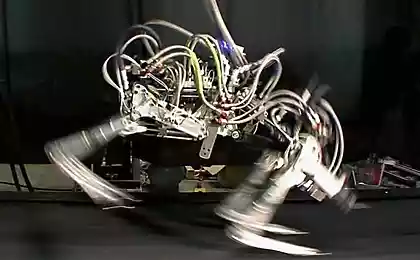
Engineers from the laboratory of biorobotic the Federal Polytechnic school (EPFL) in Lausanne, Switzerland built a walking four-legged robot simulating a walking movement of a cat.
Each of the four limbs of the robot, called Cheetah-Cub ("Cheetah Cub"), consists of three sections, which are connected by means of springs, and in appearance resembles a cat paw.
The limbs are driven by servos. The "head" of the robot there, and the place of the "tail" is the ground wire.

Advantages of the robot — light weight (about a kilogram), high speed and ability to move on uneven surfaces. Cheetah-Cub is the fastest among robots weighing less than thirty kilograms for a second he can cover the distance, which exceed seven times the length of its own body.
Create a cat-robot was conducted in 2008, but the current model is still in the prototype stage. When the design work is completed, the Cheetah-Cub can be used in rescue missions and research projects.
How big is the load capacity of the robot, the scientists said.
Source: /users/413
Each of the four limbs of the robot, called Cheetah-Cub ("Cheetah Cub"), consists of three sections, which are connected by means of springs, and in appearance resembles a cat paw.
The limbs are driven by servos. The "head" of the robot there, and the place of the "tail" is the ground wire.

Advantages of the robot — light weight (about a kilogram), high speed and ability to move on uneven surfaces. Cheetah-Cub is the fastest among robots weighing less than thirty kilograms for a second he can cover the distance, which exceed seven times the length of its own body.
Create a cat-robot was conducted in 2008, but the current model is still in the prototype stage. When the design work is completed, the Cheetah-Cub can be used in rescue missions and research projects.
How big is the load capacity of the robot, the scientists said.
Source: /users/413