502
瑞士设计的机器人-猫
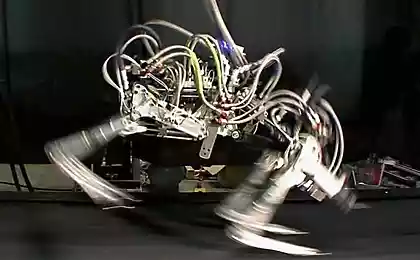
工程师从实验室的biorobotic联邦理工学校(洛桑联邦理工学院)在瑞士洛桑建立一个走的四条腿的机模拟一步行动的一只猫。
每个四肢的机器人,所谓的猎豹幼崽("猎豹幼崽"),由三个部分,这是连接的装置的弹,并在外观像一只猫的爪子。
四肢都被驱动的伺服系统。 "头"机器人在那里,和"尾"是地线。

优势的机器人—光量(大约一公斤)、高速度和能力上的不平的表面。 猎豹幼崽是最快的中间机器重量不超过三十公斤的第二个他可以复盖距离,这超过七倍,长度的其自己的身体。
创建一只猫-机器人是在2008年进行的,但当前的模型仍然在样机阶段。 当设计工作完成后,猎豹幼崽可用于在救援任务和研究项目。
多么大的负荷能力的机器人科学家说的。
资料来源:/用户/413
每个四肢的机器人,所谓的猎豹幼崽("猎豹幼崽"),由三个部分,这是连接的装置的弹,并在外观像一只猫的爪子。
四肢都被驱动的伺服系统。 "头"机器人在那里,和"尾"是地线。

优势的机器人—光量(大约一公斤)、高速度和能力上的不平的表面。 猎豹幼崽是最快的中间机器重量不超过三十公斤的第二个他可以复盖距离,这超过七倍,长度的其自己的身体。
创建一只猫-机器人是在2008年进行的,但当前的模型仍然在样机阶段。 当设计工作完成后,猎豹幼崽可用于在救援任务和研究项目。
多么大的负荷能力的机器人科学家说的。
资料来源:/用户/413